
论文专题讲解:AnyFlow:任意步视频扩散蒸馏
这页先按“论文证据节点”读:先问它解决哪一个瓶颈,再看核心图表、实验 setting 和不能外推的边界。背景概念先回 论文专题讲解 和 扩散模型。
前置:建议先知道 probability-flow ODE、Flow Matching、DMD / DMD2 和 causal video diffusion 的基本含义。
主线关系:读完后把结论回填到「扩散模型」里的少步蒸馏、视频生成推理加速和世界模型 rollout 成本三条线。
- 论文:
AnyFlow: Any-Step Video Diffusion Model with On-Policy Flow Map Distillation - 链接:arXiv:2605.13724
- 版本:2026-05-13 首次提交
- 项目页:AnyFlow
- 代码:NVlabs/AnyFlow
- 模型:NVIDIA AnyFlow collection
- Checked Date:2026-05-19
- 关键词:video diffusion、any-step generation、flow map、on-policy distillation、DMD、Wan2.1、FAR、causal video diffusion、LoRA
这篇论文的核心价值是把视频扩散蒸馏从“固定少数采样步好用”推进到“同一个蒸馏模型可以随测试时采样步数变多而继续变好”。它要解决的不是单纯 4-step 视频生成,而是 consistency distillation 的一个结构性问题:很多 consistency / endpoint mapping 学出来的学生在 4 steps 很强,但测试时给 8、16、32 steps 反而退化。
AnyFlow 的答案是:不要只学 ,而是学任意时间区间的 flow map transition:
这样学生模型既能跨大步做快速预览,也能跨小步做细致 refinement;再用 on-policy flow map distillation 修正学生自己 rollout 时的误差。
它的效率贡献是什么
| 维度 | 贡献 |
|---|---|
| 节省的成本 | 用 LoRA 后训练把 Wan2.1 级视频模型蒸馏成 few-step / any-step 生成器,减少视频扩散推理中的 NFE 成本 |
| 核心机制 | Flow map training 学任意 transition;flow map backward simulation 用 shortcut 分解 Euler rollout;DMD-style on-policy distillation 修正学生自 rollout 误差 |
| 对世界模型主线的意义 | 交互世界模型需要快速 preview 和高质量 refinement 两种模式;AnyFlow 说明少步模型不必放弃 test-time scaling |
| 主要风险 | 主要证据来自 VBench / VBench-I2V 和官方开源模型;它证明视频生成质量和采样弹性,不证明动作因果性、闭环规划收益或真实物理准确性 |
| 应接到本站哪里 | 视频与多模态扩散、DMD2、CausVid、Phased DMD、Wan2.1 |
证据等级与外推边界
| 论文结论 | 证据来源 | 证据等级 | 可外推到世界模型高效训练 | 不能直接外推 |
|---|---|---|---|---|
| Flow map 比 endpoint consistency 更适合 any-step sampling | Figure 1/2、paradigm table、VBench step-scaling 曲线 | Benchmark + Mechanism | 少步蒸馏目标应该保留 ODE trajectory 的局部 refinement 能力 | 不能证明所有 flow-map 方法都优于 consistency;还依赖训练 recipe |
| On-policy flow map distillation 能减少 test-time errors | Flow map backward simulation、ablation、DMD-style rollout loss | Ablation + System design | 世界模型 rollout 训练要尽量在学生自己的状态分布上纠偏 | 不等于解决动作条件 exposure bias 或闭环策略分布偏移 |
| 同一模型支持 causal 和 bidirectional video diffusion | 1.3B / 14B、FAR causal 与 Wan bidirectional 实验 | Benchmark | 可以把蒸馏框架接到离线视频生成和流式生成两类模型 | 不能推出实时交互延迟已满足所有应用 |
| AnyFlow 支持 downstream continued training | downstream pipeline 与机器人/驾驶可视化 | Official demo + qualitative evidence | 蒸馏模型仍保留可微 flow field,适合领域微调 | 不能证明小数据下不会遗忘或过拟合 |
| 开源代码与模型增强可复现性 | GitHub、HF collection、Diffusers pipeline | Reproducibility signal | 可直接作为 Wan2.1 any-step baseline | 主训练数据是 teacher 合成数据;完整训练成本仍较高 |
对本站主线来说,AnyFlow 最值得吸收的是一个判断:少步蒸馏不应把模型锁死在固定 NFE 上;如果测试时有更多预算,质量应继续上升。
论文位置
传统视频扩散的采样路径可以看成沿 probability-flow ODE 从高噪声状态走向数据状态。多步 teacher 虽慢,但采样步数增加通常能让数值积分更细,质量更稳。
Consistency distillation 的问题是,它常把目标改写成 endpoint projection:
这对 2-step / 4-step 很有效,因为每一步都像在做一次强投影。但当测试时采样步数变多,模型会反复执行“投到 ,再 re-noise 到中间状态”的路径,采样轨迹可能偏离原来的 PF-ODE。结果就是:更多 steps 没有带来更好结果,甚至让视频质量下降。
AnyFlow 把目标改成两时间点之间的 transition:
这表达两种行为:
| Step gap | Model behavior | Inference meaning |
|---|---|---|
| large | long-range shortcut transition | few-step fast generation |
| small | local ODE refinement | higher-step quality scaling |
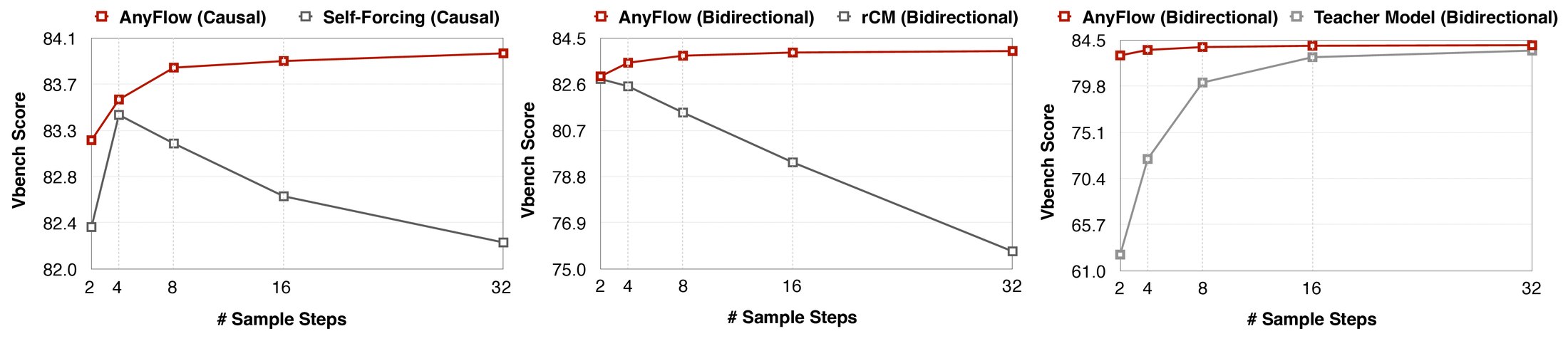
图源:AnyFlow,Figure 1(a)。原论文图意:AnyFlow 在 causal 和 bidirectional 设置下随 sample steps 增加保持或提升 VBench score;Self-Forcing / rCM 等 consistency-based 方法在更多 steps 下会下降;teacher model 则体现原始 flow-matching 采样的 test-time scaling。
左图比较 causal AnyFlow 与 Self-Forcing:Self-Forcing 从 4 steps 后开始下降,而 AnyFlow 继续上升。中图比较 bidirectional AnyFlow 与 rCM:rCM 随 steps 增加明显退化。右图比较 AnyFlow 与原始 teacher:AnyFlow 在少步区间大幅补强,同时仍保留“多给 steps 会更好”的趋势。
这张图支撑的不是“AnyFlow 永远最高”,而是一个更具体的 claim:蒸馏后的学生仍能使用额外测试时计算预算。这对生产系统很重要,因为用户常需要 4-step 快速预览和 16/32-step 最终渲染共用同一个模型。
Flow Map 是什么
令 是 PF-ODE 在时间 的 latent state:
精确 flow map 表示把状态从 传送到 :
它有两个自然性质:
| Property | Meaning |
|---|---|
| identity | |
| composition |
AnyFlow 用神经网络近似这个 flow map:
和普通 denoiser 或 consistency model 的区别在于,模型输入里同时有 和 。所以它不是只回答“从当前噪声去到干净样本”,而是回答“从当前时间去到任意更低噪声时间”。这就是 any-step 的根。
蒸馏范式对比
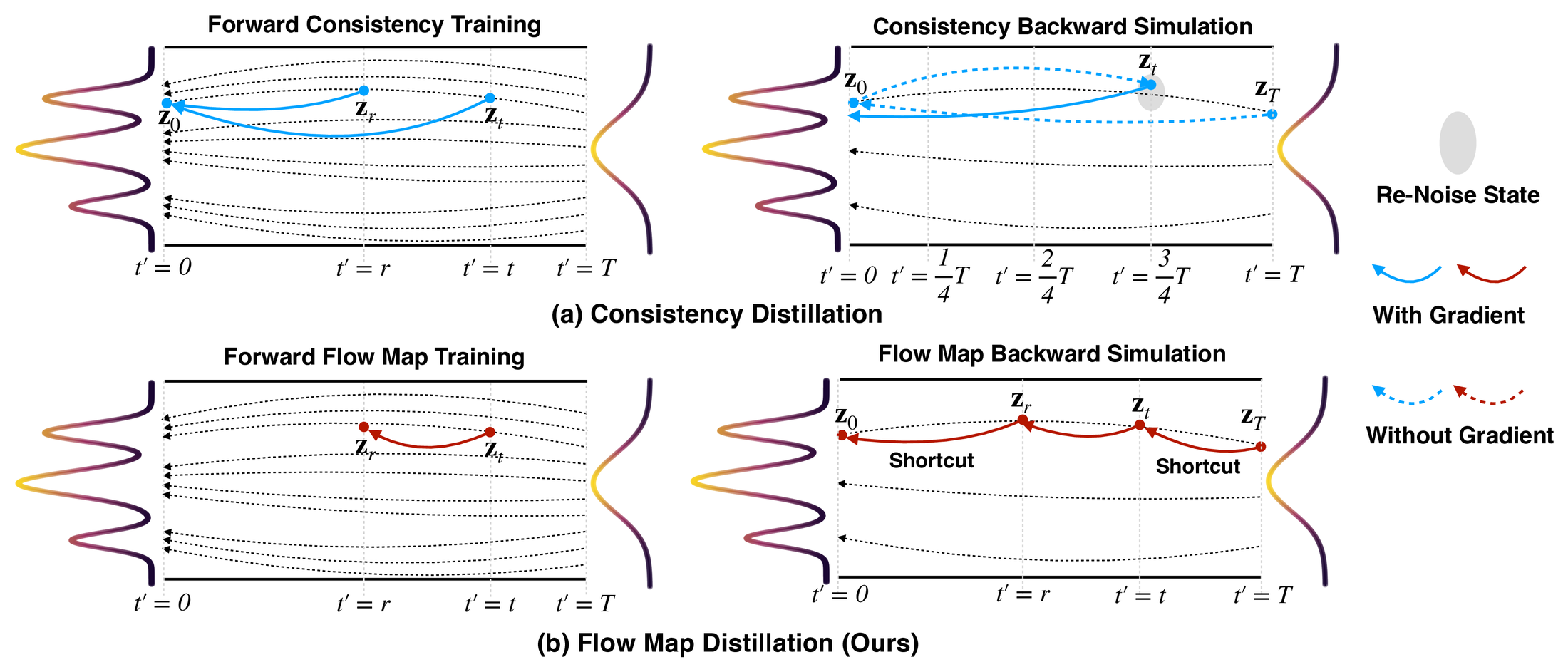
图源:AnyFlow,Figure 2。原论文图意:上半部分展示 consistency distillation 学 endpoint consistency mapping,并在 backward simulation 中需要 re-noise state;下半部分展示 flow map distillation 学 transition,并用 shortcut transition 分解 Euler sampling trajectory。
蓝色 consistency 路线的核心是 endpoint:每次都往 投影,再通过 re-noise 回到中间状态。这让少步效果强,但多步时轨迹不再像原始 ODE refinement。
红色 flow map 路线的核心是 transition:forward training 学 ,backward simulation 也沿 Euler trajectory 做区间分解。它不是每一步都假装已经到终点,而是让学生保留“从一个噪声水平过渡到另一个噪声水平”的局部能力。
论文 Table 1 把几类视频扩散蒸馏方法放在同一个坐标里。这里保留英文表头和原术语:
| Method | Forward Training | On-Policy Distillation | Causal | Bidirectional | Any-Step |
|---|---|---|---|---|---|
| APT1&2 | Consistency Training | One-Step Backward Simulation + GAN Loss | ✓ | ✓ | ✗ |
| rCM | Consistency Training | Consistency Backward Simulation + DMD Loss | ✗ | ✓ | ✗ |
| Self-Forcing | Consistency ODE Init | Consistency Backward Simulation + DMD Loss | ✓ | ✗ | ✗ |
| AnyFlow | Flow Map Training | Flow Map Backward Simulation + DMD Loss | ✓ | ✓ | ✓ |
表源:AnyFlow,Table 1。原论文表格要点:AnyFlow 与 APT、rCM、Self-Forcing 的差异在于 forward training 和 on-policy distillation 都换成 flow map 形式,同时覆盖 causal、bidirectional 和 any-step。
这张表要和 CausVid 放在一起读。CausVid 证明了 causal student 可以流式少步生成;AnyFlow 进一步追问:如果学生要在 2/4/8/16/32 steps 都可用,训练目标该怎么改。
方法总览
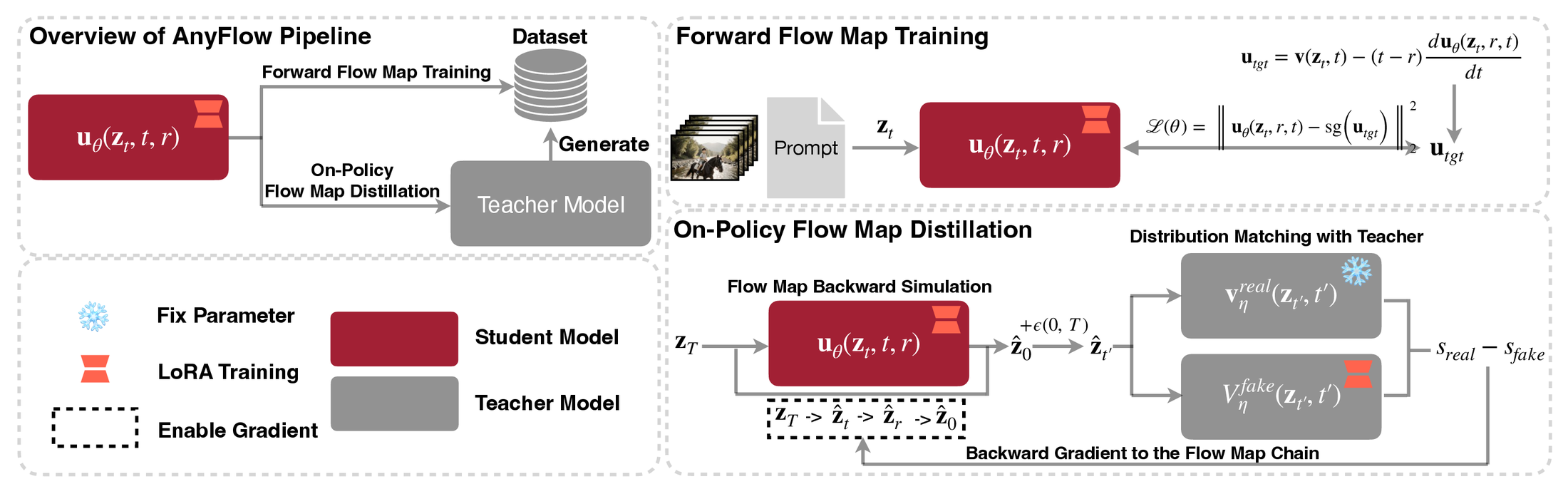
图源:AnyFlow,Figure 3。原论文图意:AnyFlow 由 forward flow map training 和 on-policy flow map distillation 两阶段组成;student 使用 LoRA 训练,teacher 参数冻结;on-policy 阶段通过 flow map backward simulation 得到学生 rollout,再用 teacher real score 与 fake score 的差做 distribution matching。
左侧说明系统对象:红色是学生模型,灰色是 teacher,雪花表示固定参数,红色 LoRA 标记表示只训练低秩适配参数。右上是 Stage 1:用合成数据做 forward flow map training。右下是 Stage 2:学生自己 rollout 到 ,再 re-noise 到 ,用 teacher / fake score difference 做 DMD-style on-policy distillation。
这张图最重要的信息是“LoRA 后训练 + frozen teacher + on-policy rollout”三者同时存在。AnyFlow 不是从零训练视频模型,也不是只做 supervised teacher trajectory fitting;它先让学生学会 flow map,再让学生在自己的测试时状态分布上被 teacher 纠偏。
可以把整条方法压成:
1 | Wan2.1 video diffusion teacher |
Stage 1:Forward Flow Map Training
AnyFlow 采用 MeanFlow 风格的 flow map 训练。模型不是直接预测 ,而是预测区间平均速度 ,再用:
训练目标是:
其中 是 stop-gradient。论文重点不在重新发明 MeanFlow,而是在视频扩散后训练里补了几个很实际的 recipe。
Interpolated Timestep Conditioning
预训练视频 diffusion model 通常只有一个 timestep embedding。Flow map 需要同时输入 和 。最直接的做法是新增一个 或 embedding projection,但论文发现 zero-init projection 会让新 embedding norm 在训练中膨胀,导致生成结果过饱和。
AnyFlow 改用插值形式:
其中 从预训练的 初始化,论文实验固定 。这个设计有两个作用:
- 当 时,模型更接近原预训练 timestep 表示,保住 instantaneous flow field;
- 当 时,模型也能看到目标时间 ,不必从一个完全冷启动的新 projection 学起。
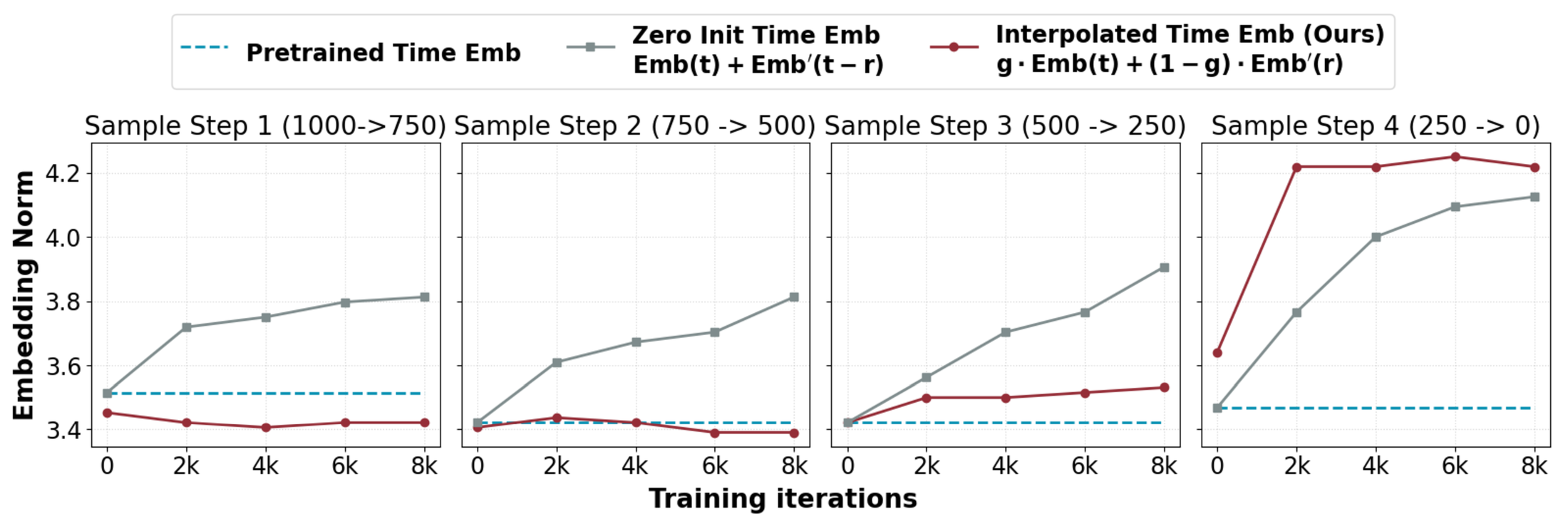
图源:AnyFlow,Figure 7(a)。原论文图意:zero-init timestep conditioning 的 embedding norm 会在训练中变得明显大于 pretrained embedding;interpolated timestep conditioning 的 norm 更接近预训练模型。
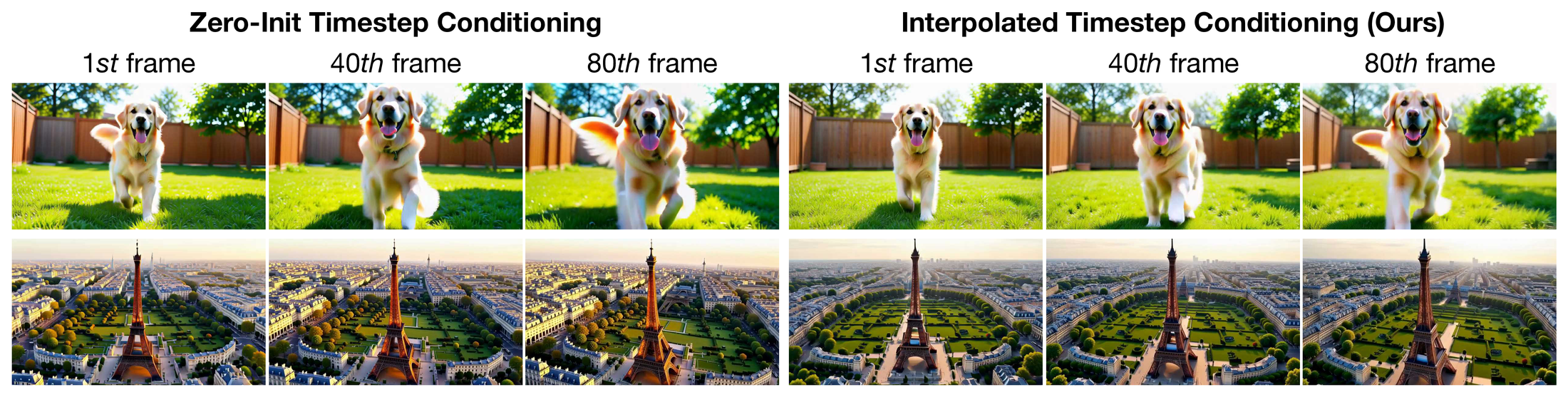
图源:AnyFlow,Figure 7(b)。原论文图意:zero-init timestep conditioning 容易带来过饱和视觉结果;interpolated timestep conditioning 能抑制该问题。
Time Sampler 与 Loss Reweighting
论文先从 uniform 采样 开始,再重排成 、。但直接 uniform 不匹配 Wan2.1 预训练里的时间分布,于是作者引入 来平衡不同噪声水平的 loss。
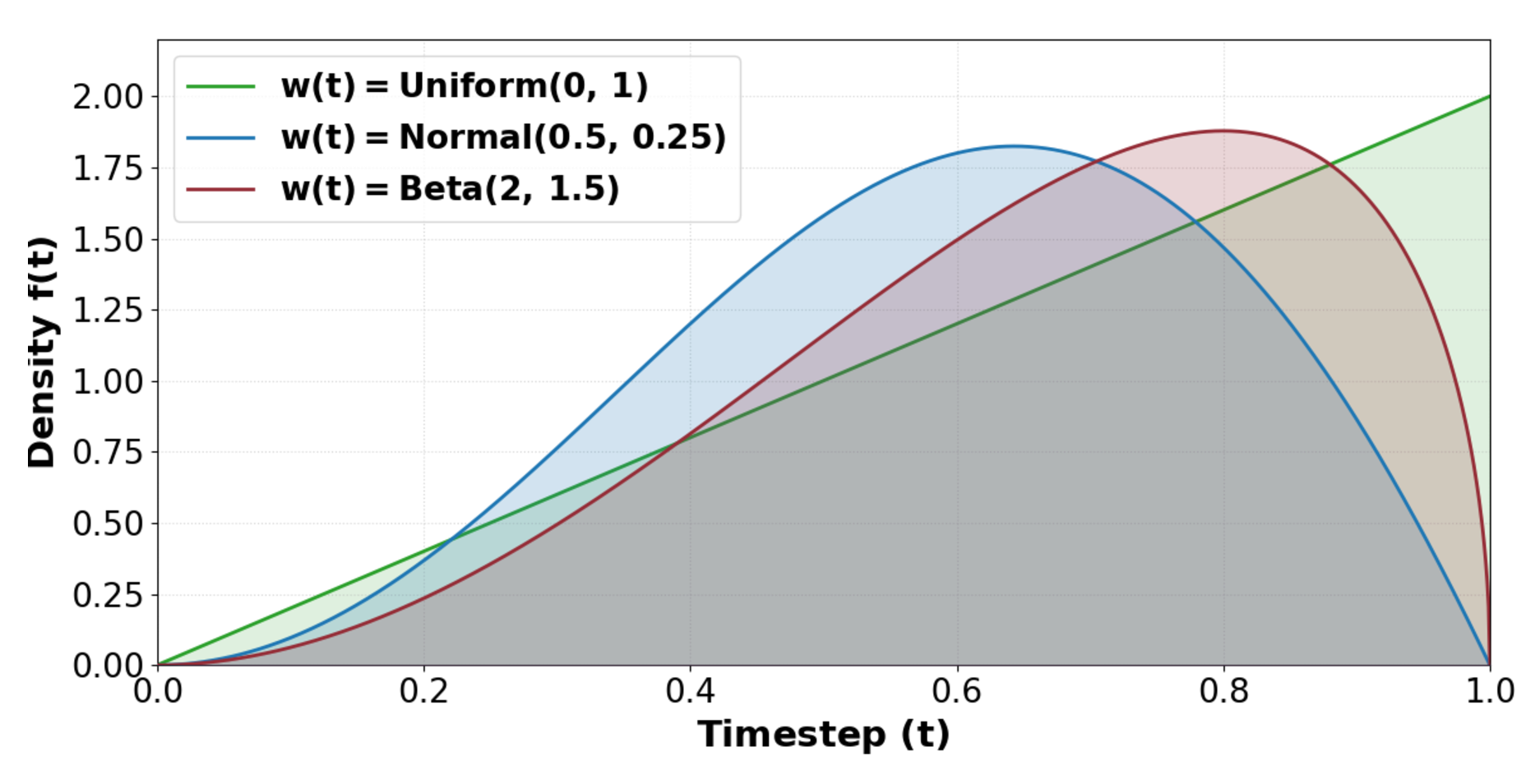
图源:AnyFlow,Figure 6(a)。原论文图意:展示不同 诱导的 timestep density ,其中 。
论文的 time sampler 消融如下,表头和原文保持英文:
| Bidirectional 4 NFEs | Bidirectional 32 NFEs | Causal 4 NFEs | Causal 32 NFEs | |
|---|---|---|---|---|
| 83.46 | 83.75 | 83.58 | 83.91 | |
| 83.40 | 83.79 | 83.54 | 83.93 | |
| 83.48 | 83.96 | 83.54 | 83.96 |
表源:AnyFlow,Figure 6(b)。原论文表格要点: 在 bidirectional 和 causal 设置下给出最好的整体 step-scaling 表现,因此主实验采用该配置。
AnyFlow 还使用 adaptive loss reweighting。直觉是:后训练时模型在 的 instantaneous field 已经比较可靠,所以用 的 loss 当 baseline,动态缩放 的 loss:
这一步是为了避免远距离 transition 的梯度把预训练好的局部速度场冲坏。
Guidance-Fused Training
AnyFlow 把 CFG 融进训练,使测试时可以省掉 conditional / unconditional 双分支计算。论文采用:
其中 是条件预测, 是空条件预测。注意这里的 是 CFG scale,不要和前面 timestep embedding interpolation 里的 混淆。
工程含义是:如果训练时已经把 guidance 行为融合进学生,测试时可以用更少 forward pass 得到接近 CFG 的 prompt-following。
Stage 2:On-Policy Flow Map Distillation
Stage 1 学到的是一个能做任意区间 transition 的学生,但它仍可能在测试时遇到两个误差:
| Error | Where it appears | Why it matters |
|---|---|---|
| discretization error | few-step sampling | 大步跳跃时,每一步的数值误差更大 |
| exposure bias | causal generation | 学生推理时看到的是自己生成的历史,不是 teacher-forced 真实历史 |
因此 Stage 2 从 Stage 1 checkpoint 出发,联合优化 forward flow map 目标和 DMD-style on-policy 目标。核心不是直接完整 rollout 所有 steps,而是用 flow map backward simulation。
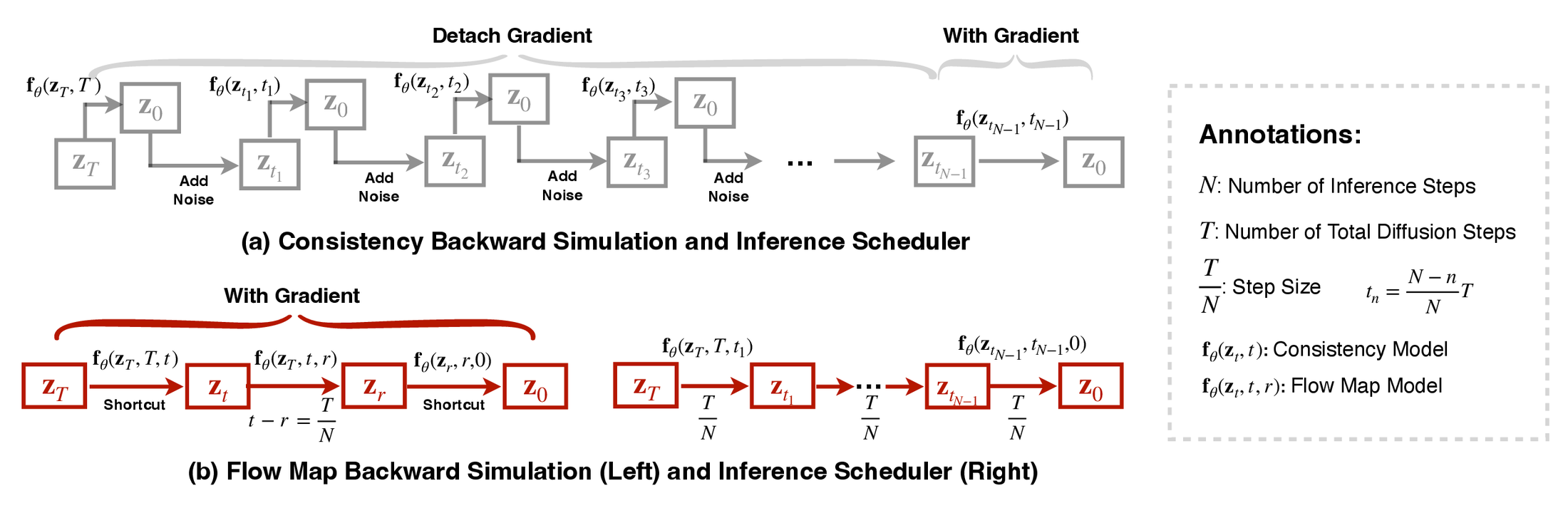
图源:AnyFlow,Figure 4。原论文图意:consistency backward simulation 需要沿 consistency trajectory 做 re-noise,且常用 truncated gradient 控制成本;flow map backward simulation 把 Euler sampling trajectory 拆成 shortcut segments,用 learned flow map 高效模拟不同 step budgets。
假设目标测试预算是 steps。AnyFlow 先在采样轨迹上选中一个中间 timestep ,再令 。完整 rollout 被拆成三段:、、。第一段和最后一段用 flow map shortcut 跳过,中间 是目标 transition。
这个设计让训练可以模拟不同 的测试轨迹,但计算成本不随 线性增长。它也解释了为什么 Table 训练成本里 4-step flow map simulation 比 consistency 略贵,但 16-step 时明显更便宜。
DMD 部分仍然沿用 real / fake score 差分:
其中 来自强 teacher, 学当前学生生成分布。这个目标的意义是:不是让学生逐点复刻 teacher 的采样路径,而是把学生 rollout 分布推回 teacher / data 的高密度区域。
Causal AnyFlow:接到 FAR 视频模型
AnyFlow 同时支持 bidirectional video diffusion 和 causal video diffusion。对 causal 模型,论文采用 FAR pipeline,并补了几项系统设计:
| Design | Detail | Why it matters |
|---|---|---|
| context compression | keep three full-token chunks; compress remaining chunks with a larger patchify kernel size 4 | 降低 teacher-forcing 训练成本和 KV-cache 体积 |
| non-uniform chunk partition | first chunk size 1; subsequent chunks size 3 | 第一帧条件更精确,同时保住后续运动建模吞吐 |
| unified causal generator | same causal model supports T2V, I2V and V2V | 让一个 few-step 模型覆盖多种视频任务 |
| KV reuse in rollout | cache and reuse KV states during causal rollouts | 降低 on-policy simulation 和采样成本 |
这里可以看到 AnyFlow 和 CausVid / Self-Forcing 的连续性:它同样关心 causal rollout 和 exposure bias,但它把 forward training 与 backward simulation 都改成 flow map 版本,目标是让同一个 causal 模型在不同 steps 下都可靠。
模型训练细节
论文的训练 setting 值得单独记,因为 AnyFlow 的效果来自“强 teacher + 合成数据 + LoRA + 两阶段后训练”,不是低成本 prompt trick。
| Item | Detail |
|---|---|
| Base implementation | Wan2.1 in Diffusers |
| Training data | synthetic dataset of 256K prompt-video pairs |
| Data source | generated from Wan2.1-T2V-14B |
| Video shape | up to 81 frames |
| Resolution | |
| Trainable parameters | parameter-efficient fine-tuning with LoRA |
| LoRA rank | 256 |
| Stage 1 objective | forward flow map objective |
| Stage 1 optimizer | AdamW |
| Stage 1 learning rate | |
| Stage 1 global batch | 32 for 1.3B, 16 for 14B |
| Stage 1 iterations | 6,000 for 1.3B, 4,000 for 14B |
| Stage 2 objective | jointly optimize forward flow map and on-policy objectives |
| Stage 2 optimizer | AdamW |
| Stage 2 learning rate | |
| Stage 2 iterations | 800 |
表源:AnyFlow,Section 5.1 Implementation Details。原论文要点:所有主模型都基于 Wan2.1,用 Wan2.1-T2V-14B 生成的 256K 合成 prompt-video pairs 做后训练,并以 LoRA rank 256 执行两阶段训练。
这组配置里有几个信号:
- 合成数据是 teacher 生成的:AnyFlow 没有直接宣称用真实大规模视频重新训练,它是在强 Wan2.1 teacher 上做 distillation / post-training。
- LoRA rank 很高:rank 256 说明视频 DiT 的后训练容量需求不小,不能把它理解成极小 adapter。
- Stage 1 比 Stage 2 长很多:先学稳定 flow map,再上 on-policy DMD 纠偏。
- 14B batch 更小、iteration 更少:这符合大模型视频训练的系统约束。大模型不是简单把 1.3B 配方无脑放大。
- 训练目标保留 forward flow map:Stage 2 不是只做 DMD;它联合保留 forward flow map training,避免 on-policy 目标把任意步 transition 能力带偏。
开源仓库也给出了一些落地信号:训练配置位于 options/train/anyflow/,FAR causal 示例包含 chunk_partition: [1,3,3,3,3,3,3,2]、compressed_patch_size: [1,4,4]、lora_rank: 256、gate_value: 0.25、weight_type: beta08 和 fuse_guidance_scale: 3.0。这说明 AnyFlow 发布的是完整训练 pipeline,而不只是权重。
训练成本表
| Method | Causal | Bidirectional |
|---|---|---|
| Standard Flow-Matching | 5.8 | 9.7 |
| + Guidance-Fused Training | 7.8 | 12.3 |
| + Guidance-Fused Training + Differential Derivation Equation | 10.4 | 16.8 |
| Consistency Backward Simulation (4 Steps) | 45.9 | 41.8 |
| Flow Map Backward Simulation (4 Steps) | 53.1 (+15.7%) | 51.2 (+22.5%) |
| Consistency Backward Simulation (16 Steps) | 93.8 | 96.6 |
| Flow Map Backward Simulation (16 Steps) | 53.1 (-43.4%) | 51.2 (-47.0%) |
表源:AnyFlow,Table 4。原论文表格要点:成本在 Wan2.1-1.3B-T2V、batch size 16、8×NVIDIA H100 上测得,单位是 seconds/iter;on-policy distillation 报告的是包含一次 generator 和一次 discriminator update 的 simulation upper-bound cost。
这张表很重要,因为它解释了 flow map backward simulation 的取舍:
- 在 4 steps 下,flow map simulation 需要反传完整 shortcut chain,比 consistency backward simulation 略贵;
- 在 16 steps 下,consistency simulation 成本随 steps 增长,而 flow map shortcut 基本保持不变;
- 如果目标只是固定 4-step,收益不一定来自训练吞吐;如果目标是 any-step,flow map 的训练成本结构更合理。
实验结果
T2V 使用 VBench,报告 Quality、Semantic 和 Total。I2V 使用 VBench-I2V,报告 Quality、I2V 和 Total。论文为了公平比较,对 Wan2.1 base、Self-Forcing、rCM 以及若干 community 14B causal models 使用官方 VBench augmented prompts 重新评测;表中 表示 re-evaluate under the same setting。
这点要注意:AnyFlow 对关键近邻模型做了统一协议重评测,但 VBench 仍是自动评测,不能替代用户偏好、真实工作流或世界模型闭环能力。
T2V 结果
| Model | #Params | Resolution | NFEs | Quality | Semantic | Total |
|---|---|---|---|---|---|---|
| Bidirectional Video Diffusion Models | ||||||
| LTX-Video | 1.9B | 82.30 | 70.79 | 80.00 | ||
| CogVideoX-2B | 2B | 82.48 | 77.81 | 81.55 | ||
| HunyuanVideo | 13B | 85.09 | 76.88 | 83.24 | ||
| Wan2.1-T2V-1.3B | 1.3B | 84.99 | 76.23 | 83.24 | ||
| rCM-Wan2.1-T2V-1.3B | 1.3B | 4 | 84.71 | 73.74 | 82.51 | |
| AnyFlow-Wan2.1-T2V-1.3B | 1.3B | 4 | 85.24 | 76.41 | 83.48 | |
| AnyFlow-Wan2.1-T2V-1.3B | 1.3B | 32 | 85.70 | 76.99 | 83.96 | |
| Wan2.1-T2V-14B | 14B | 85.77 | 75.58 | 83.74 | ||
| rCM-Wan2.1-T2V-14B | 14B | 4 | 85.47 | 76.72 | 83.73 | |
| AnyFlow-Wan2.1-T2V-14B | 14B | 4 | 85.70 | 77.38 | 84.04 | |
| AnyFlow-Wan2.1-T2V-14B | 14B | 32 | 85.76 | 77.44 | 84.10 | |
| Causal Video Diffusion Models | ||||||
| MAGI-1 | 4.5B | 8 | 80.98 | 65.68 | 77.92 | |
| SkyReels-V2 | 1.3B | 84.70 | 74.53 | 82.67 | ||
| Self-Forcing | 1.3B | 4 | 85.23 | 76.01 | 83.39 | |
| AnyFlow-FAR-Wan2.1-1.3B | 1.3B | 4 | 85.60 | 75.30 | 83.54 | |
| AnyFlow-FAR-Wan2.1-1.3B | 1.3B | 32 | 85.92 | 76.12 | 83.96 | |
| LightX2V-Wan2.1-14B-CausVid | 14B | 9 | 85.29 | 75.96 | 83.42 | |
| FastVideo-CausalWan2.2-A14B-Preview | 14B | 8 | 84.28 | 78.49 | 83.12 | |
| Krea-Realtime-Wan2.1-14B | 14B | 4 | 84.80 | 77.07 | 83.25 | |
| AnyFlow-FAR-Wan2.1-14B | 14B | 4 | 85.82 | 76.97 | 84.05 | |
| AnyFlow-FAR-Wan2.1-14B | 14B | 32 | 86.12 | 77.55 | 84.41 |
表源:AnyFlow,Table 2。原论文表格要点:AnyFlow 在 1.3B 和 14B、bidirectional 和 causal 设置下都能在 few-step regime 匹配或超过 consistency baseline,并在 32 NFEs 继续提升。
读表时抓四点:
- 14B bidirectional:AnyFlow-Wan2.1-T2V-14B 在 4 NFEs 得到 84.04,高于 rCM-Wan2.1-T2V-14B 的 83.73;32 NFEs 进一步到 84.10。
- 14B causal:AnyFlow-FAR-Wan2.1-14B 在 4 NFEs 得到 84.05,32 NFEs 到 84.41,是表里 causal 14B 的最高 Total。
- Semantic 不是所有项都最高:FastVideo-CausalWan2.2-A14B-Preview 的 Semantic 是 78.49,高于 AnyFlow-FAR-14B 的 76.97/77.55,说明不能只读 Total。
- 核心 claim 是 step scaling:AnyFlow 最重要的证据不是单个 4-step 数值,而是 4 到 32 steps 的趋势仍然向上。
I2V 结果
| Model | #Params | Resolution | NFEs | Quality | I2V | Total |
|---|---|---|---|---|---|---|
| CogVideoX-5B-I2V | 5B | 78.61 | 94.79 | 86.70 | ||
| HunyuanVideo-I2V | 13B | 78.54 | 95.10 | 86.82 | ||
| Step-Video-TI2V | 30B | 81.22 | 95.50 | 88.36 | ||
| MAGI-1 | 24B | 82.44 | 96.12 | 89.28 | ||
| Wan2.1-I2V-14B | 14B | 80.30 | 95.12 | 87.71 | ||
| FastVideo-CausalWan2.2-A14B-Preview | 14B | 8 | 78.82 | 94.81 | 86.82 | |
| AnyFlow-FAR-Wan2.1-14B | 14B | 4 | 80.39 | 95.35 | 87.87 |
表源:AnyFlow,Table 3。原论文表格要点:AnyFlow-FAR-Wan2.1-14B 只用 4 NFEs 就达到 87.87,总分接近或略高于 Wan2.1-I2V-14B 的 NFEs。
I2V 表说明了 causal AnyFlow 的多任务性:同一个 FAR causal generator 不只做 T2V,还能接第一帧做 I2V。这里最重要的是 NFE 差异:AnyFlow 4 NFEs 对比 Wan2.1-I2V-14B 的 NFEs。这是非常大的推理预算差异。
Downstream Continued Training
AnyFlow 还强调一个和很多蒸馏模型不同的性质:它保留了细粒度 instantaneous flow field,所以蒸馏后仍然适合继续在下游数据上训练。Self-Forcing 这类已经强绑定到特定 consistency / causal 采样范式的模型,继续训练更麻烦。
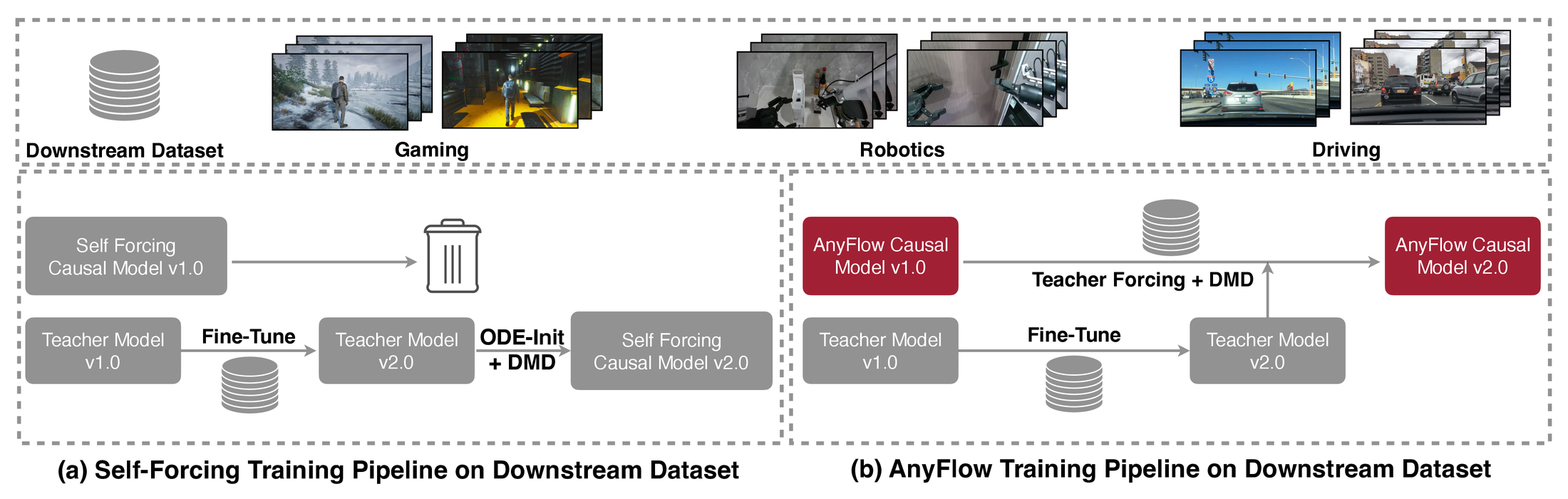
图源:AnyFlow,Figure 5。原论文图意:AnyFlow 支持从 pretrained checkpoint 继续在下游数据上训练,避免重新训练一个 causal generator。
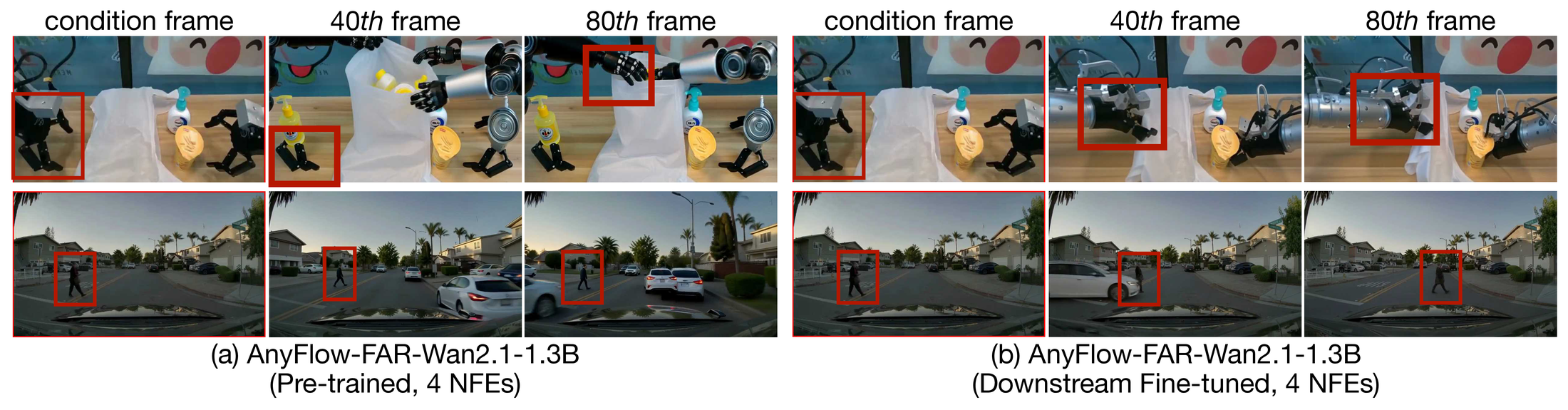
图源:AnyFlow,Figure 6。原论文图意:AnyFlow-FAR-Wan2.1-1.3B 在机器人和驾驶等 specialized domains 上继续训练后,identity preservation 和 trajectory accuracy 都有改善。
这部分证据目前更像官方 qualitative demonstration,而不是完整 benchmark。它支撑的结论是:AnyFlow 的 flow map 形式没有把模型变成只能固定采样的死学生,仍可做领域继续训练。它不能单独证明下游小数据训练一定稳定,也不能证明机器人或自动驾驶闭环收益。
对工程而言,这个性质很有吸引力:如果少步模型仍能继续训练,品牌、机器人、驾驶等特殊域就不必每次都重新蒸馏。
和 CausVid / Phased DMD / Wan 的关系
| Dimension | CausVid | Phased DMD | Wan2.1 | AnyFlow |
|---|---|---|---|---|
| Main target | streaming causal video diffusion | preserve diversity and motion in few-step DMD | open video foundation model | any-step video diffusion distillation |
| Key object | causal student with KV cache | SNR phase expert / subinterval score | VAE + Video DiT + Flow Matching | flow map transition |
| Main bottleneck | latency and causal rollout | one-step degeneration / biased score | large-scale video data and training system | fixed-step student cannot use extra test-time budget |
| Training emphasis | ODE init + asymmetric DMD | progressive distribution matching | staged pretraining/post-training | forward flow map + on-policy flow map distillation |
| Best use case | low-latency streaming video | few-step image/video distillation quality | base video generation model | one model for fast preview and higher-step refinement |
AnyFlow 不是替代 Wan,而是站在 Wan2.1 上做后训练和蒸馏。它吸收了 CausVid 的 causal rollout 问题意识,但主要突破是 any-step scaling;相较 Phased DMD,它更关注任意步测试预算。
最值得复用的设计经验
1. 少步模型也要保留 test-time scaling
很多蒸馏系统只追 4-step 分数,结果是多给 steps 反而坏。AnyFlow 的核心提醒是:真实产品常有两种模式,快速预览和高质量导出。如果同一模型不能随预算伸缩,部署上就要维护多个模型或多个蒸馏版本。
2. Endpoint mapping 会改变采样轨迹
Consistency distillation 很强,但 endpoint projection + re-noise 的路径不等于原始 PF-ODE。AnyFlow 把目标改成 ,本质是在保护 ODE transition 的局部结构。
3. On-policy 训练要和推理路径一致
Stage 2 不是在 teacher-forced 状态上训练,而是让学生自己 rollout,再用 teacher / fake score 差分纠偏。这和 Self-Forcing、CausVid 的训练-推理对齐思想一致,只是这里的 backward simulation 换成了 flow map shortcut。
4. Timestep embedding 是后训练稳定性的核心
增加第二个 timestep 看起来是小改动,但 zero-init embedding 会导致 norm 膨胀和视觉过饱和。AnyFlow 的 interpolated timestep conditioning 是很实用的后训练 trick。
5. 合成 teacher 数据不是坏事,但要承认证据边界
256K prompt-video pairs 来自 Wan2.1-T2V-14B。这使训练数据可控、版权和质量更易管理,也让学生直接继承 teacher 分布。但这意味着模型上限、偏差和内容覆盖也强依赖 teacher。
局限与风险
- 不是动作条件世界模型:AnyFlow 支持 T2V/I2V/V2V 视频生成,但没有证明固定历史下不同动作会导致可验证的未来分叉。
- 主要评测是自动指标:VBench / VBench-I2V 有价值,但不能替代人类偏好、生产工作流和长期一致性评测。
- 训练仍然不轻:虽然用 LoRA,Stage 1/2 仍依赖强 teacher、合成视频数据、H100 训练和 DMD-style teacher/fake score。
- 合成数据继承 teacher 偏差:Wan2.1-T2V-14B 生成的 256K 样本会把 teacher 的视觉偏好、失败模式和安全过滤边界带进学生。
- 下游继续训练证据偏 qualitative:机器人和驾驶可视化说明方向成立,但还缺系统 ablation、数据规模曲线和任务指标。
- Any-step 不等于任意长上下文:采样步数弹性不等于视频时长、记忆窗口或物理状态长期一致性都解决。
- 4-step 成本收益和 16/32-step 成本收益不同:训练成本表显示 flow map backward simulation 在 4 steps 下略贵,真正优势在更高 step simulation。
读完应该记住什么
AnyFlow 的关键贡献是把视频扩散蒸馏目标从 endpoint consistency 改成 flow map transition,让蒸馏学生不再被固定 NFE 锁死。它通过两阶段训练实现这一点:
1 | forward flow map training |
工程上最值得带走的是:少步学生也要能把额外采样预算转化成更好质量。
AnyFlow 要按任意步 flow-map 蒸馏读;实验同时验 NFE-质量曲线、吞吐、长视频一致性和下游任务。
- 回到论文总入口:论文专题讲解,用同一套 claim / 图表 / 边界口径横向比较。
- 把本篇结论接回主题:扩散模型。
- 如果关注流式生成,回读:CausVid:流式自回归视频扩散。
- 如果关注少步蒸馏质量,回读:Phased DMD:分阶段少步蒸馏。
参考资料
- Gu et al. AnyFlow: Any-Step Video Diffusion Model with On-Policy Flow Map Distillation. arXiv:2605.13724.
- 官方项目页:AnyFlow.
- 官方代码:NVlabs/AnyFlow.
- Title: 论文专题讲解:AnyFlow:任意步视频扩散蒸馏
- Author: Charles
- Created at : 2026-05-15 09:00:00
- Updated at : 2026-05-15 09:00:00
- Link: https://charles2530.github.io/2026/05/15/ai-files-paper-deep-dives-diffusion-anyflow/
- License: This work is licensed under CC BY-NC-SA 4.0.