
具身智能:家庭机器人流程与失败排查
家庭机器人常被视为具身智能最具想象力的落地场景,但它也是最容易被低估的复杂场景。
家庭环境看起来比工厂轻松,实际上却包含更多开放物体、更强分布变化、更多人类打断,以及远高于实验室的长尾。真正理解家庭机器人,不仅要看它能做哪些任务,更要看它在哪些流程上最容易失败。
这页的重点不是列举 demo,而是把家庭机器人放回真实家庭流程中看:任务会被打断,环境会变化,指令常常很口语,成功标准也并不总是单一步动作是否完成。
ALOHA 原论文的任务示例图很适合提醒读者:家庭和桌面操作不是一个“抓取”动作,而是很多精细接触、双臂协调、物体状态变化和阶段性恢复的组合。

图源:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware,Appendix Figure。原论文图意:展示 ALOHA 遥操作任务示例,覆盖多种双臂精细操作场景,说明真实操作数据包含接触、遮挡、双手协同和任务阶段变化。
这组任务图比单张抓取 demo 更有教学价值:它展示的是“先接近、再接触、再改变物体状态、再验证结果”的连续过程。家庭机器人做收纳、开关抽屉、整理桌面时,失败往往出现在阶段切换处,例如已经抓到但没放稳、打开了但没有验证、移动了但没有完成用户意图。
ALOHA/ACT 的结构图则从策略侧补充了同一件事:家庭机器人不应该只输出“下一瞬间动作”,而要输出能跨越一个小阶段的 action chunk,并用时间集成降低抖动和阶段切换错误。
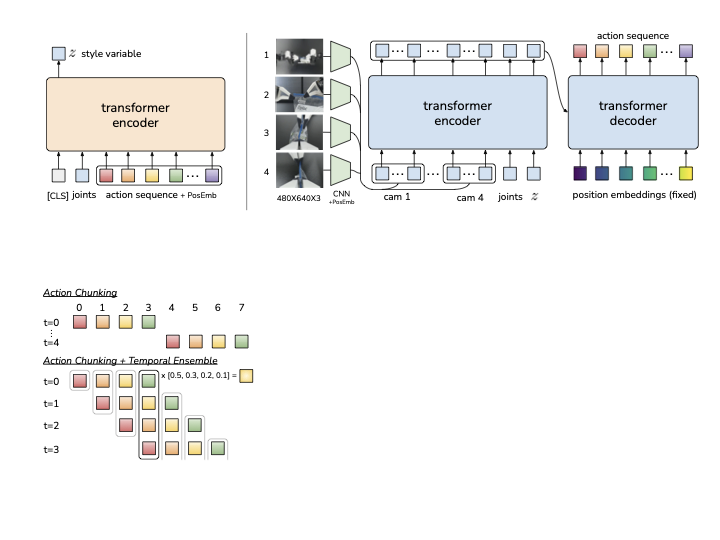
图源:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware,Figure 2。原论文图意:Action Chunking with Transformers (ACT) 用 CVAE 编码动作序列和关节观测,测试时根据多视角图像、关节状态和 latent 生成一段 action sequence,并用 temporal ensembling 平滑执行。
ACT 图里的重点是 action chunk:策略一次预测一小段动作,而不是每个控制周期孤立地预测一步。家庭机器人做开抽屉、取物、放置、整理这类任务时,失败常发生在阶段边界,例如抓到了但没放稳、打开了但没验证、移动了但没有完成用户意图。chunk 能提供更连贯的局部动作先验,但系统仍需要在每个阶段后做状态验证、失败检测和必要的重试或接管。
1. 家庭任务为什么难
家庭环境的问题集中在四点:物体种类极多且摆放无规律,语言指令口语化、含指代、经常不完整,人和宠物会随时进入环境,任务通常也是多步骤且会被打断。
因此家庭机器人不是“把工厂机器人搬回家”,而是更接近长期共处的开放世界 agent。
1.1 为什么“开放世界”在家庭里特别明显
家庭里常见的困难包括同类物体外观相近但细节不同,物体可能被塞进抽屉、篮子、布袋或沙发缝,房间布局会被家庭成员随时改变,用户指令还常常带省略和共享常识,例如“顺手把那个也收一下”。
这些都意味着机器人不仅要会操作,更要会持续理解一个动态变化的日常世界。
2. 一个家庭任务的典型流程
一个家庭任务常从接收自然语言目标开始,先解析约束和指代,再定位相关房间与物体,导航接近后执行抓取、打开、放置等操作,并在必要时与人确认中间状态,出错后再恢复或继续。
任何一个环节不稳,整条任务链都会断。
2.1 为什么流程视角比单项能力更重要
一个机器人可能导航很强、抓取也不错,但如果它在“找不到东西时如何求助”“被打断后如何续上”“放置完成后如何验证”这些流程节点上薄弱,整体体验仍然会很差。
3. 家庭任务真正难在跨模块耦合
家庭机器人最难的不是单个子问题,而是子问题之间互相放大。
举例来说:
- 语言理解里把“蓝色杯子”理解成了“桌上唯一的杯子”;
- 视觉定位又没发现旁边其实还有一个深蓝色马克杯;
- 抓取时选错对象;
- 放到厨房后还自认为任务成功。
这说明家庭任务里很多失败不是某个模块完全崩,而是多个模块“各错一点,最后整体失败”。
4. 最常见失败模式
4.1 找物失败
物体被遮挡、被放到异常位置、外观变化大。
家庭里最典型的情况,是杯子被毛巾挡住一半、遥控器夹在沙发缝里、纸巾盒被购物袋部分遮挡。
实验室数据里常见的完整摆放物体,并不能覆盖这些情况。
4.2 语言 grounding 失败
“那个杯子”“左边那个抽屉”“把它放回原位”这类指代若没有共享上下文,很容易理解错。
尤其当环境里存在多个相似物体、多个候选位置,或历史对话中提过多个对象时,指代错误会迅速级联。
4.3 操作细节失败
门把、抽屉、塑料袋、布料、玻璃器皿都属于高难对象。
家庭操作不止是“抓住一个刚体”,还包括打开冰箱门、抻开塑料袋、扶正歪倒的物体、轻放易碎容器。
这些都对接触、力度、姿态和安全要求很高。
4.4 任务被打断后状态丢失
人类临时改口、宠物碰动物体、其他家庭成员改变环境,都会让机器人原计划失效。
例如:
- 机器人正要拿杯子,用户说“先不用杯子,先把桌子擦一下”;
- 它中途转去厨房,回来后杯子被别人拿走了;
- 机器人却仍然按原计划在旧位置搜索。
4.5 “做了动作但没完成意图”
这类失败在家庭里特别多。
例如用户说“把桌上的纸巾盒扶正”,机器人只是把纸巾盒挪了一下位置,却没把倾斜姿态纠正。
动作发生了,但任务意图没有真正完成。
5. 为什么家庭场景更需要恢复能力
工厂里环境较固定,家庭里则经常“世界已经变了”。
因此家庭机器人若没有状态跟踪和恢复机制,很快就会反复找同一个物体,在旧目标上继续行动,执行前不重新确认环境,或出错后只会停住、不会换策略。
恢复能力在家庭场景中不是增强项,而是主能力。
一个直观类比
家庭机器人更像一个在家里帮忙的新助手,而不是工厂里的固定机械臂。
一个好助手不是永远不犯错,而是在出错后知道先停、再看、再问、再改计划。
这正是恢复能力的本质。
6. 一个具体例子
任务:“把餐桌上的蓝色杯子放到水槽旁边,然后把桌上的纸巾盒扶正。”
看似简单,实际上要求机器人正确识别蓝色杯子而非其他杯具,安全抓取并移动到厨房,在水槽周围找到合适放置点,返回餐桌定位纸巾盒,还要理解“扶正”意味着姿态修复而非仅仅移动位置。
这类任务跨房间、跨对象、跨动作类型,任何一步都可能出错。
6.1 如果把失败拆开,会发现很多隐含前提
机器人需要隐式知道:“水槽旁边”不是任意潮湿区域,杯子不能倒扣放在不稳边缘,纸巾盒扶正后还要保持可用,执行完第一步后还要记得第二步仍然未完成。
这些都是家庭环境里的常识与任务持续性问题。
7. 家庭机器人为什么比 demo 更依赖人机交互
真实家庭场景里,机器人常常需要澄清含糊指令、反馈中间状态、在失败时询问替代方案,并确认是否继续执行。
例如:
- “你说的是餐桌左边那个蓝杯,还是靠窗那个?”
- “水槽边已经没有安全放置空间,要放在沥水架上吗?”
这说明家庭机器人不是只靠动作模型,还需要稳定的人机协商机制。
8. 家庭长尾物体特别难
相比标准数据集中那些常见刚体,家庭里更麻烦的是柔性包装、透明容器、反光厨具、湿滑餐具、形变布料、半开抽屉与门。
这些对象的共同特点,是外观易受视角和光照影响、接触模型复杂、抓取和放置需要细致控制。
9. 评测家庭机器人时不能只看单步成功率
家庭机器人评测不能只看单步成功率,更应该把长任务、恢复、澄清、安全和放置合理性放到一起看。
一张更贴近现实的指标表
| 指标 | 为什么重要 |
|---|---|
| 长任务完成率 | 家务通常不是一步动作 |
| 恢复率 | 家庭环境经常变化 |
| 澄清成功率 | 用户指令常不完整 |
| 安全事件率 | 与人共处是刚需 |
| 误抓率 | 相似物体很多 |
| 放置合理率 | “放下”不等于“放对” |
10. 一些典型流程设计建议
如果从系统设计角度看,家庭机器人至少要把几类能力做成流程节点,而不是留给模型临场发挥:找不到物体时的重搜和求助策略,指令含糊时的澄清策略,中途环境变化后的状态刷新,操作前的安全检查,以及完成后的结果验证。
这些节点往往比单次抓取精度更决定整体体验。
11. 一个总判断
家庭机器人流程的真正难点,不是单一抓取或导航,而是把语言、记忆、规划、操作、恢复和人机共处一起串成可持续流程。
理解这些失败模式,是判断家庭机器人距离真实可用还有多远的关键。
如果把整页浓缩成一句话,可以记成:
家庭机器人不是“会做几个动作”的问题,而是“能不能在不断变化的家里持续把事情做成”的问题。
工程收束
家庭机器人要验收的是连续流程,而不是单个动作。任务状态、物体记忆、异常恢复、人类打断和安全边界都要进入评测与日志;否则系统即使会抓取、会导航,也很容易在真实家庭的长尾变化里失稳。
- Title: 具身智能:家庭机器人流程与失败排查
- Author: Charles
- Created at : 2025-06-05 09:00:00
- Updated at : 2025-06-05 09:00:00
- Link: https://charles2530.github.io/2025/06/05/ai-files-embodied-ai-household-robotics-workflows-and-failure-patterns/
- License: This work is licensed under CC BY-NC-SA 4.0.