
具身智能:Sim2Real 与具身数据引擎:真实失败怎样变成下一轮能力
Sim2Real 不是把仿真画面调得像照片。真实机器人失败时,问题往往不是“照片不像”,而是夹爪摩擦不对、透明包装反光、相机外参漂了、桌面被遮挡、控制器延迟、物体比仿真更软、或者人突然把目标物挪走。
这篇只回答一个问题:怎样让仿真、真实日志和评测 hard set 形成闭环,让每轮真实失败都变成下一轮训练资产?
结论先说清楚:Sim2Real 的核心是一套数据引擎。仿真负责低成本覆盖变量,system identification 负责把仿真中心调准,真实部署日志负责暴露长尾,数据筛选和标注负责把失败变成训练样本,hard set 负责验证新模型是否真的补上短板。只做其中一环,系统很容易在演示里漂亮、上线后脆弱。
Sim2Real gap 是三种分布差
可以把仿真和真实的差异写成:
这里 是观测, 是状态, 是动作, 是任务或环境上下文, 是成功、失败、接触、碰撞等结果标签。这个式子的意思是:同样的观测、状态和动作,在仿真和真实世界里可能产生不同的下一步观测、下一步状态和任务结果。
差异通常来自三层。
| 层 | 典型差异 | 会造成什么失败 |
|---|---|---|
| 观测差 | 光照、纹理、反光、运动模糊、相机外参、深度噪声 | 看错物体、误判距离、找不到边界 |
| 动力学差 | 质量、摩擦、刚度、接触、控制延迟、夹爪形变 | 抓空、打滑、推偏、插不进去 |
| 任务差 | 家庭杂乱、物体摆放、人的干扰、语言粒度、成功标准 | 任务中断、错误回收、无法恢复 |
很多 Sim2Real 讨论只盯第一层:画面像不像。机器人部署却经常死在第二层和第三层:视觉识别对了,但接触错了;抓到物体了,但长任务中判断错了下一步。
仿真首先是任务数据工厂
高质量仿真不是一张漂亮 3D 图,而是一套可复现的数据工厂:资产、场景、机器人、相机、动作接口、专家轨迹、扰动、成功判定、失败日志和导出 schema 都要在一起。
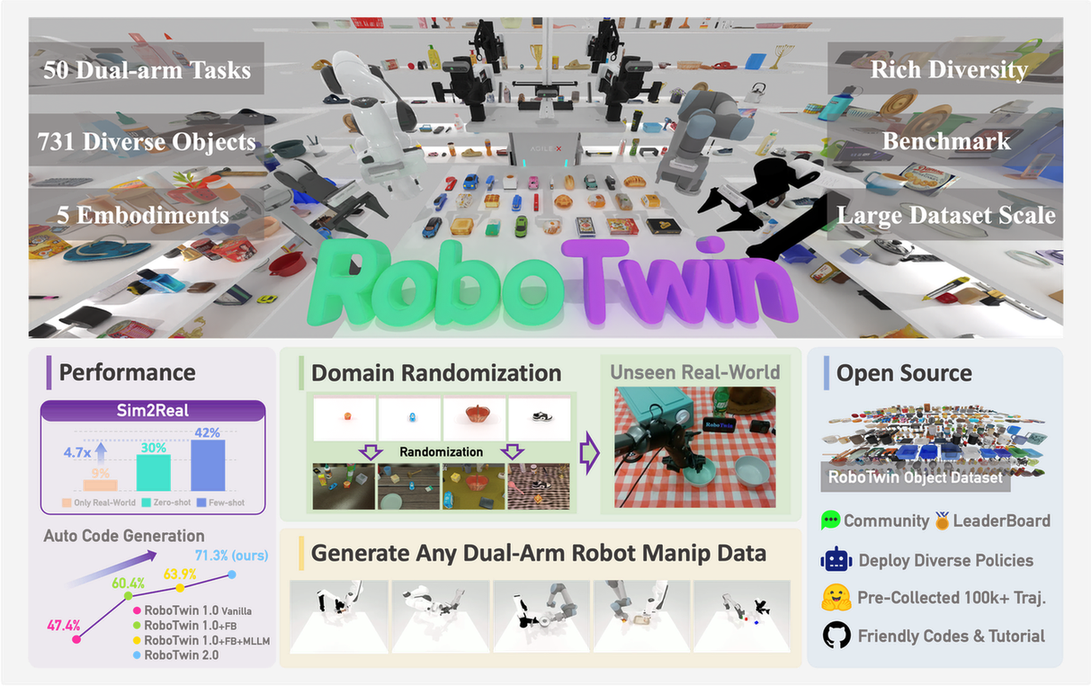
图源:RoboTwin 2.0 官方文档。原图展示双臂任务、资产、domain randomization、专家数据、benchmark 和 Sim2Real 组织方式。本站读法:仿真数据能否进入 VLA/世界模型训练,不取决于渲染是否漂亮,而取决于任务脚本、success checker、轨迹导出和失败回放是否形成系统。
这张图应该按流水线读。一个仿真任务至少要回答:物体资产从哪里来,碰撞网格和抓取点是否标好,任务如何重置,专家轨迹如何生成,成功条件如何判定,失败时保存哪些中间状态,导出的数据能否和真实机器人日志放进同一套 schema。
如果只导入一个物体、跑一段看起来顺的轨迹,这还不是数据引擎。数据引擎要求每条轨迹失败时能追溯:是资产尺度错、碰撞网格错、摩擦错、相机错、planner 错、controller 错,还是 success checker 被钻空子。
Domain randomization 让策略别太脆
Domain randomization 的想法是承认仿真不可能完全真实,于是主动随机化环境参数:
这里 是仿真参数,可以包含光照、纹理、相机、质量、摩擦、接触、背景、控制延迟; 是参数分布; 是策略 在这一组参数下的回报。这个目标的意思是:策略不要只适应一个完美实验室,而要在一批有差异的世界里都能完成任务。
随机化不只是视觉增强。视觉随机化能防止模型记住固定灯光和纹理;动力学随机化能防止模型假设物体永远一样重、一样滑、接触永远理想;相机和控制随机化能防止模型过拟合精确标定和零延迟控制。
Domain randomization 最容易犯两个错误。第一,随机化范围太窄,真实世界仍然落在分布外。第二,随机化太宽,任务变成噪声海,策略学不到可执行规律。实用做法通常是先用真实数据估计中心范围,再围绕中心做有任务意义的随机化。
System ID 把仿真中心调准
另一条路线是 system identification:用真实轨迹反推仿真参数,让仿真更接近真实系统。
这里 是真实机器人轨迹, 是参数为 的仿真轨迹, 是两条轨迹的差异度量。这个式子想表达的是:调质量、摩擦、相机、控制延迟等参数,让仿真行为更接近真实回放。
System ID 和 domain randomization 不是互斥关系。System ID 负责把中心调准,randomization 负责承认中心附近还有不确定性。机械装配、插拔、推拉、软体和夹持任务里,单靠视觉随机化通常不够,接触动力学和控制延迟的校准会更重要。
数据引擎把失败变成资产
现代机器人系统不是一次性训练完成,而是一个循环:
这里 是第 轮训练数据, 是部署日志,Select 负责筛出有价值片段,Label 负责标注失败类型、阶段和恢复动作,Gate 负责决定哪些样本进训练集、哪些进 hard set、哪些只做诊断。这个公式的重点是:线上日志不能直接倒进训练集,它必须经过筛选、标注和门禁。
值得回流的样本通常不是普通成功片段,而是:
| 样本 | 为什么值钱 | 回流后补什么 |
|---|---|---|
| 明确失败 | 抓空、掉落、碰撞、卡住、误按 | 修正模型当前短板 |
| near-miss | 差一点撞、差一点掉、低置信但成功 | 提前补安全边界 |
| 人工接管 | 人类在关键状态接手并恢复 | 学习纠偏策略 |
| OOD 观测 | 反光、透明、遮挡、杂乱、新背景 | 补视觉长尾 |
| 任务阶段混乱 | 该放下却继续抓、该重看却继续执行 | 补高层状态和语言阶段 |
这也是为什么失败样本比普通成功样本更值钱。继续收一千条“干净桌面抓红杯成功”,对透明包装抓空没有帮助。真正有用的是把透明、反光、塌陷、遮挡、抓偏后恢复这些样本单独分桶,并在下一轮 hard set 上验证。
跨机器人数据先解决接口异构
Open X-Embodiment 这类数据集说明:具身数据不是图片数据。不同机器人本体、相机、动作空间、控制频率、任务语言和成功定义混在一起,数据量越大,接口噪声也越可能被放大。
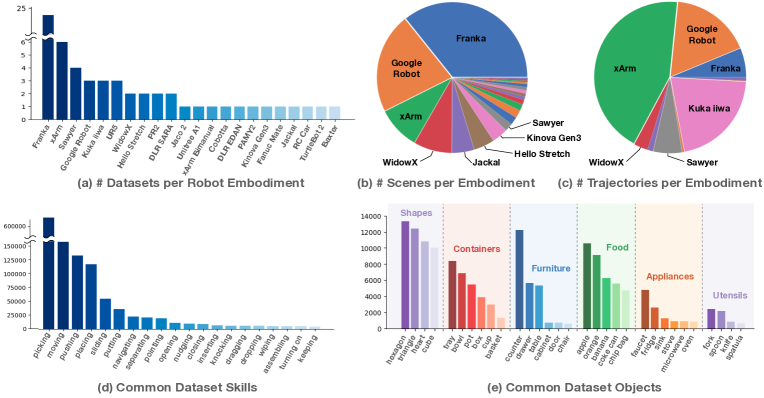
图源:Open X-Embodiment / RT-X,Figure 1。原图统计不同 robot embodiment、scene、trajectory、skill 和 object category 的分布。本站读法:跨机器人数据的价值是扩大经验覆盖;风险是动作、相机和任务语义不对齐时,模型学到的不是泛化,而是混乱接口。
跨机器人数据至少要对齐五件事:观测口径、动作口径、时间戳、任务语言和结果标签。比如同样是 gripper close,不同夹爪的力度、速度和闭合定义可能不同;同样是相对位移,不同机器人坐标系和控制频率会让动作语义改变。数据引擎如果不记录这些 metadata,后续模型很难知道哪个差异来自任务,哪个差异来自机器人本体。
数据源贡献要做消融
π0.5 的数据消融图适合说明一个关键点:数据 recipe 决定模型补上哪种能力。Web 数据补语义,跨机器人数据补动作和本体覆盖,多环境真实数据补场景泛化,移动操作数据补长任务和开放家庭分布。
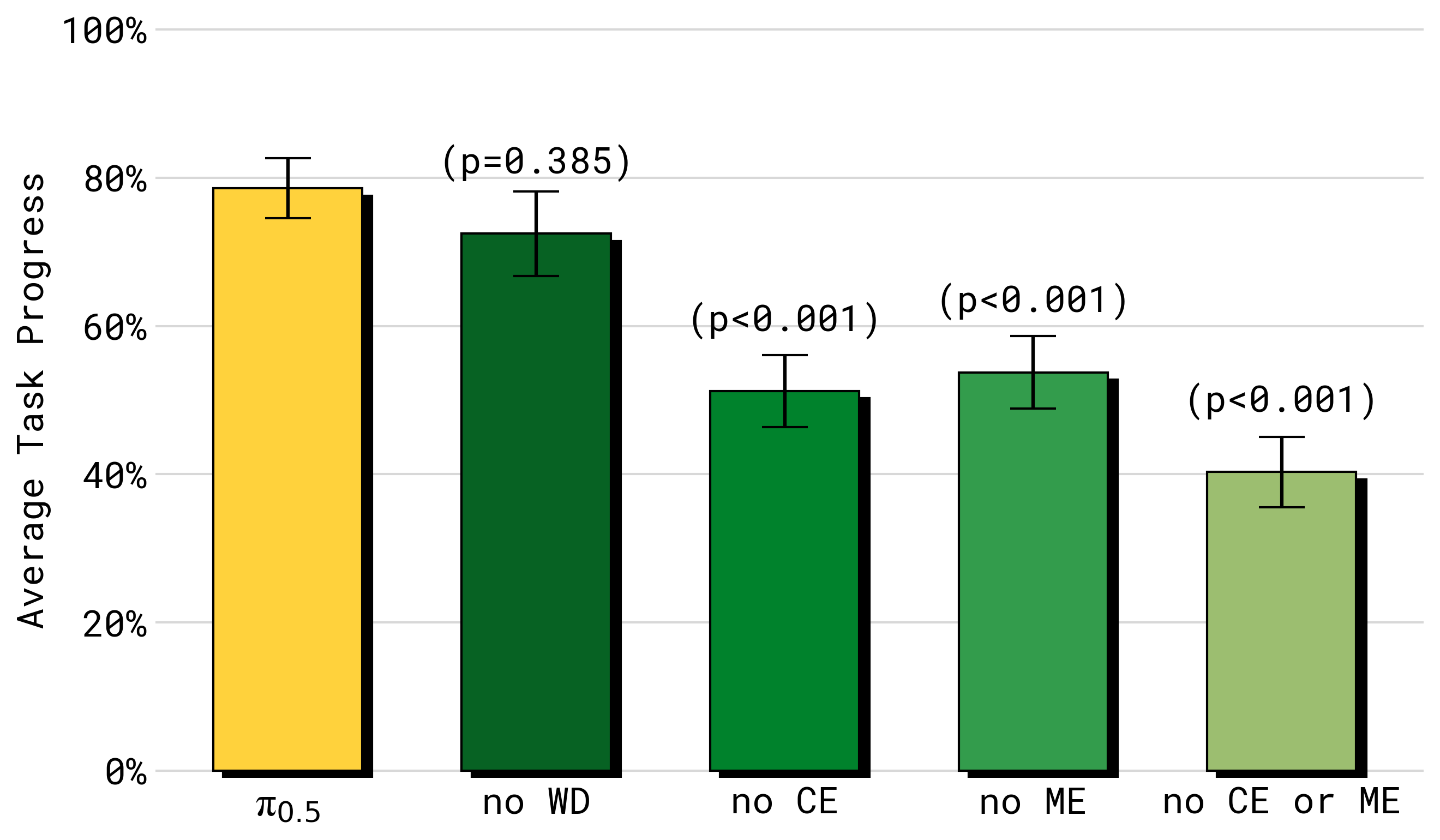
图源:π0.5,Figure 10。原图比较去掉 web data、cross-embodiment data、multi-environment data 等来源后的表现变化。本站读法:数据引擎不能只报告总样本量,要说明每类数据源补的是语义、动作、环境、长任务还是恢复能力。
读这类图时不要只问“哪种数据最重要”。更好的问题是:当前系统失败在哪个桶?如果失败是语义理解错,web/VLM 数据可能有帮助;如果失败是新厨房布局,multi-environment 数据更关键;如果失败是动作不稳,跨机器人数据未必够,还要看动作接口、controller 和失败恢复轨迹。
Hard set 是数据引擎的验收器
数据回流是否有效,不能只看下一轮平均成功率。平均分很容易被简单场景淹没。更可靠的是维护一组 hard set:每个 hard bucket 对应一种系统短板。
| hard bucket | 例子 | 验收指标 |
|---|---|---|
| 透明/反光物体 | 透明塑料盒、金属杯、玻璃门 | 抓取成功率、误检率 |
| 接触动力学 | 滑动物体、软袋、卡扣、插拔 | 打滑率、卡住率、恢复率 |
| 相机/标定扰动 | 外参轻微偏、深度噪声、遮挡 | 定位误差、重观察成功率 |
| 长任务阶段 | 收纳、整理、开合柜门后继续操作 | 阶段完成率、错误恢复 |
| 人类干扰 | 物体被移动、临时口头修正 | 接管率、安全停止率 |
每次训练后,数据引擎都要回答:新增数据改善了哪个 bucket?有没有污染其他能力?失败样本进训练后,模型是否在原失败场景上真正恢复,还是只在平均任务上看起来更好?
读 Sim2Real 论文时问四个问题
第一,仿真覆盖的是视觉差、动力学差、任务差中的哪一类。只展示漂亮渲染,不足以证明真实机器人收益。
第二,真实数据如何进入闭环。是只用少量 real validation,还是有部署日志、失败标注、人工接管和回放验证?
第三,数据源贡献是否可分解。Web data、robot data、sim data、failure data、human correction 各自补什么能力?
第四,评测是否有 hard bucket。没有长尾桶,平均成功率很容易掩盖最贵的失败。
读完以后怎么判断
Sim2Real 可以按四句话记:
- 仿真不是照片生成器,而是任务、资产、轨迹、扰动、判定和日志 schema 的数据工厂。
- Domain randomization 让策略别太脆,system ID 让仿真中心别太假。
- 数据引擎的核心不是多收日志,而是筛选、标注、门禁和 hard set 验收。
- 真实失败最有价值,因为它告诉你下一轮随机化、数据采集和评测该补哪里。
继续读相邻内容时,可以接 VLA 数据与策略学习、Isaac Sim 与 RoboTwin 仿真数据链、Rerun 机器人数据可视化 和 世界模型数据引擎。
外部精读
- Domain Randomization for Transferring Deep Neural Networks from Simulation to the Real World:理解“随机到足够宽,让真实世界落进训练分布”的经典思路。
- Learning Dexterous In-Hand Manipulation:看大规模随机化、自动域随机化和真实灵巧手迁移的工程案例。
- Open X-Embodiment / RT-X:理解跨机器人数据为什么首先是接口对齐问题。
- DROID:看真实世界机器人数据如何采集多场景、多任务和长轨迹。
- RoboCat:理解“收集新任务数据,再训练,再扩展能力”的机器人自改进闭环。
- RoboTwin 2.0 docs:理解仿真任务、资产、expert trajectory 和 success checker 如何组织成数据链。
- Title: 具身智能:Sim2Real 与具身数据引擎:真实失败怎样变成下一轮能力
- Author: Charles
- Created at : 2025-06-06 09:00:00
- Updated at : 2025-06-06 09:00:00
- Link: https://charles2530.github.io/2025/06/06/ai-files-embodied-ai-sim2real-and-data-engines/
- License: This work is licensed under CC BY-NC-SA 4.0.