
具身智能:VLA 数据、模型与评测路线
这页是一份具身智能和 VLA 的扩展教程,重点放在三件事:常用 benchmark 和数据集到底在测什么,VLA / 视频预测策略 / 空间与深度 VLA 各自解决什么,以及怎样把“数据更多”升级成“数据 recipe 更好、评测更真实、闭环更稳”。

图源:Wikimedia Commons: Franka Emika2.jpg。具身智能的关键不是机器人“像不像智能”,而是视觉、语言、动作、控制器、接触和任务判定能否形成稳定闭环。
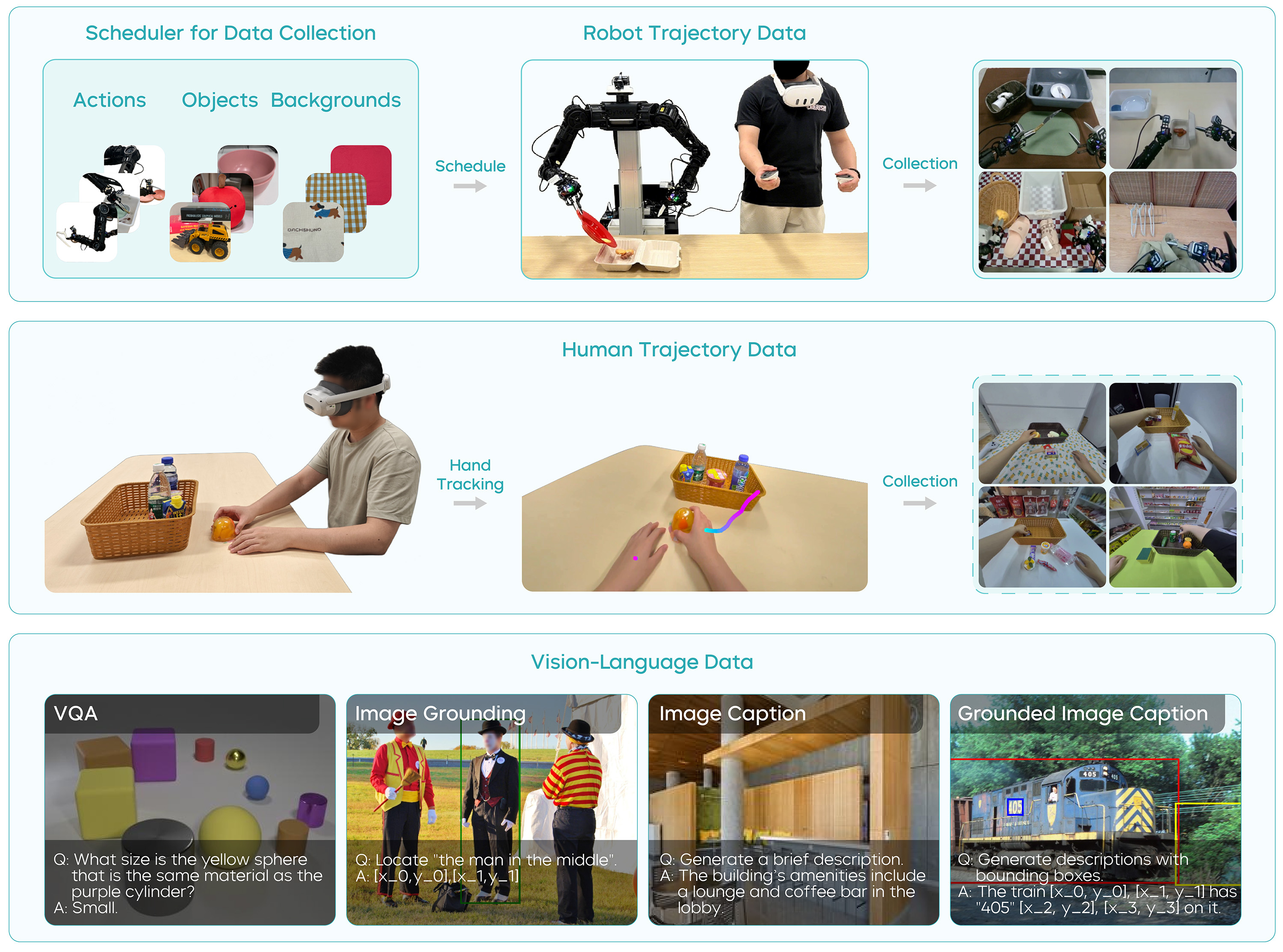
图源:GR-3 Technical Report,Figure 4。具身智能的数据 recipe 不只是成功演示,还要组织机器人轨迹、人类轨迹、任务状态、无效指令和长任务数据,让 VLA 在 rollout 中知道何时继续、终止或拒绝。
不同数据块不是简单相加:机器人轨迹提供低层动作,人类/任务数据提供高层语义,invalid / terminate 状态训练模型何时拒绝或停止,长任务数据训练 task progress。读 VLA 数据 recipe 时,先问每类数据解决哪个失败模式,再决定是否值得采。
具身智能不是 VLA 的同义词。VLA 是把视觉和语言接到动作的策略接口;具身智能还包括传感器、标定、动作表示、控制器、仿真、数据采集、任务判定、失败恢复和安全边界。一个 VLA 论文能否落地,常常取决于这些“模型之外”的系统层。
本页是 VLA 论文、数据集和评测路线的总索引。它回答“看哪些 VLA 系统、数据 recipe 和 benchmark”,而不是展开相机标定、仿真资产、低层控制或安全案例;这些分别放在相机、仿真、闭环和部署相关页面。
本页怎么读
先读 benchmark 和数据集,建立“任务到底在考什么、数据到底来自哪里”的判断;再看 GR-2、GR-3、VPP、SpatialVLA、DepthVLA、X-VLA 等模型路线,分清它们是在补视频动态、任务状态、空间尺度,还是跨 embodiment 适配;最后再回到失败轨迹、纠正数据和数据引擎,因为 VLA 真正走向部署时,坏经验和信用分配往往比一次成功 demo 更重要。
1. 先看任务和 Benchmark:它到底在考什么
先看 Benchmark 时,不要只记名字,要问四个问题:任务是否长时程、是否跨环境、是否真实机器人、成功判定是否可靠。
| Benchmark | 主要考点 | 关键信息 | 适合用来判断 |
|---|---|---|---|
| CALVIN | 语言条件下的长期操作任务序列 | ABC 环境训练,D 环境评估;每个指令链连续 5 个任务 | 长时程、语言跟随、环境泛化 |
| MetaWorld | Sawyer 机器人多任务操作 | 50 个任务,每个任务可用 Oracle 策略采轨迹 | 操作技能广度、RL / imitation baseline |
| RoboChallenge | 多载体桌面任务 | 30 个任务,覆盖精确 3D 定位、遮挡、多阶段长任务 | 通用策略和真实操作难点 |
| BridgeData V2 / Simpler WidowX | 真实数据与仿真评测连接 | WidowX 多环境真实轨迹,Simpler 近似镜像真实域 | Sim2Real、zero-shot 策略评估 |
| LIBERO | 任务组合和目标泛化 | Spatial / Object / Goal 等任务套件 | 语言目标和任务组合泛化 |
| RoboTwin | 双臂操作和数字孪生 | 任务、功能点、专家轨迹和 success checker | 资产标注、仿真生成、自动判卷 |
先看 train-test split,再看 success checker,最后看 episode 长度。很多模型在短桌面任务上表现不错,但一到新环境、长任务、无效指令和失败恢复,能力边界会很快暴露。
2. 数据集:真正重要的是异质性
具身数据集不是“越大越好”这么简单。不同数据集的机器人、相机、动作空间、场景和任务标签都不一样。RT-1、DROID、RH20T、Mobile ALOHA、Open X-Embodiment、BridgeData V2、Galaxea Open-World 等数据集,正好说明了今天 VLA 的核心难题:跨机器人、跨场景、跨动作接口学习同一类物理技能。
| 数据集 | 典型规模 / 特点 | 关键价值 |
|---|---|---|
| RT-1 | 大规模真实机器人轨迹,覆盖多任务、多对象和多环境 | 说明 Transformer policy 能在真实机器人控制中吃规模化数据 |
| Open X-Embodiment | 公开页面说明汇集 22 种机器人、60 个数据集、100 万以上真实轨迹 | 跨 embodiment 预训练的代表数据底座 |
| DROID | 官方页面给出 76k demonstrations、350h interaction、564 scenes、86 tasks | in-the-wild 场景多样性和统一硬件采集 |
| RH20T | 多机器人、多视角、长短任务混合 | 适合研究跨硬件和多视角泛化 |
| Mobile ALOHA | 双臂移动操作,第一人称多相机 | 长时家务和双臂协调 |
| BridgeData V2 | WidowX 真实世界操作数据 | 与 Simpler WidowX 连接,常用于 Sim2Real |
| Galaxea Open-World | 150 任务类别、50 真实场景、100k 轨迹 | 开放场景下通才策略训练 |
Open X-Embodiment 的公开页面强调统一数据格式和跨机器人策略;DROID 则强调真实场景、便携采集平台和丰富视角。把这两类数据放在一起看,可以得到一个重要结论:具身模型的泛化不是单一数据集堆出来的,而是靠数据来源之间的互补。
3. VLA 模型族:从“看图出动作”走向任务状态和世界后果
VLA / 机器人基础模型可以按能力层次分成几类。
| 模型 / 路线 | 核心思想 | 对系统设计的启发 |
|---|---|---|
| GR-2 | web-scale 视频预训练,再用机器人轨迹微调,联合未来视频和动作预测 | 视频里学到的动态知识可以迁移到小样本机器人操作 |
| GR-3 | Qwen2.5-VL 主干 + flow matching Action DiT,输出 action chunk,并加入任务状态监督 | VLA 需要知道任务进行中、已完成还是无效 |
| Video Prediction Policy | 先训练文本引导视频预测模型,再用预测表征训练逆动力学动作模型 | 未来视频的中间表征可作为动作生成条件 |
| GEN-0 | 大规模真实物理交互数据、10B+ 模型、Harmonic Reasoning | 具身 scaling 可能需要更大模型和高数据量环境 |
| Spirit-v1.5 | 开放式、目标驱动、非脚本化数据收集 | “脏而多样”的数据可能比过度干净的脚本数据更利于泛化 |
| SpatialVLA | Ego3D 位置编码 + 自适应动作网格 | 用空间结构统一跨机器人观察和动作 |
| DepthVLA | 深度感知空间推理,基于 π0 风格 MoT 结构 | 深度和绝对尺度能增强操作中的空间推理 |
| X-VLA | 用软提示吸收不同 embodiment / 数据源差异 | 跨硬件异质性不只在动作头,也在相机、任务和数据协议 |
| RECAP / π0.6 路线 | 离线 RL、专家纠正和自主经验回流 | VLA 不能只模仿成功轨迹,还要从坏经验中提取好信号 |
这些路线共同说明一个趋势:VLA 正从“视觉语言到动作”的单向映射,转向更系统的闭环学习:
1 | 异构预训练数据 |
如果要精读单篇论文,建议顺着 GR-2 -> Video Prediction Policy -> SpatialVLA -> GR-3 -> π0.5 -> DreamZero 读:前两篇讲“预测未来怎样帮助动作”,SpatialVLA 补空间坐标,GR-3 和 π0.5 补长任务与任务状态,DreamZero 则把 world-action modeling 推到可直接输出策略的位置。
4. GR-2:视频知识怎样迁移到机器人操作
GR-2 的关键观点是:大规模视频中包含大量人类活动和物理动态先验,即使这些视频没有机器人动作,也能帮助机器人理解“事情接下来会怎样”。它先在大规模视频片段和文本 token 上预训练,再在机器人微调阶段同时学习未来视频生成和动作预测;真实部署时,用 WBC 将笛卡尔轨迹转成低层关节动作。这里最重要的系统启发是:预测轨迹通常比单步动作更利于平滑执行,在机器人数据稀缺时,物体 / 背景增强也能补一部分覆盖。
GR-2 的关键细节可以整理成这样:
| 维度 | 关键细节 | 系统启发 |
|---|---|---|
| 模型结构 | 约 230M 参数、95M 可训练;冻结文本 encoder 和 VQGAN;机器人状态用 linear 编码 | 小模型也能验证“视频动态先验 -> 机器人动作”的路线 |
| 预训练 | 约 3800 万视频片段、500 亿 token;HowTo100M、Ego4D、Something-Something V2、EPIC-KITCHENS、Kinetics-700 等 | 先从人类活动视频里学动态,再迁移到机器人 |
| 机器人数据 | RT-1、Bridge 等机器人视频经过手部过滤和重 caption;105 个桌面任务、约 40k 轨迹、8 类技能 | 机器人数据不是孤立采集,要接到视频预训练语义上 |
| 稀缺数据设置 | 完整数据约 1/8,即每任务约 50 条轨迹,总量约 5k | 评估 few-shot 不是口号,要明确每任务轨迹数 |
| bin picking | 55 个对象、约 94k pick-and-place 轨迹;测试包含更多对象组合 | 把单任务做深能检验接触和泛化,而不只是语言跟随 |
| 机器人平台 | 7-DoF Kinova Gen3 + Robotiq 2F-85,静态头部相机 + 腕部相机 | 双视角把全局语义和局部接触连接起来 |
| 控制落地 | 预测 Cartesian 轨迹,优化平滑度,再由 WBC 以约 200Hz 转成低层关节动作 | VLA 输出不是直接等于电机命令,中间需要控制器投影 |
这条路线适合记成:
1 | 互联网视频先验 |
它和世界模型天然相连:如果模型能预测动作后的未来视频,再把未来视频与动作轨迹对齐,就开始具备“动作后果”的内部模拟能力。
5. GR-3:任务状态和拒绝能力很关键
GR-3 的总结很重要:模型不只要输出动作,还要估计任务状态。in progress 表示任务仍在执行,避免模型过早停止;terminate 表示任务已经成功完成,避免继续乱动;invalid 表示当前观察下指令不可完成,让模型学会拒绝无效任务。
无效任务是具身系统最容易被忽视的能力。例如桌上没有蓝色碗时,“把蓝色碗放进箱子”不应该触发机器人乱抓。一种常见做法是训练时随机替换为无效指令,并让模型预测 invalid,而不监督动作块其他维度。
这给系统设计一个直接建议:不要只训练 success policy,要训练 task-state-aware policy。
真实部署可以把任务状态接到安全逻辑:
1 | invalid -> 拒绝执行或请求澄清 |
如果房间里没有杯子,聪明的机器人不应该努力“找到一个看起来像杯子的东西”。它应该先判断任务不可完成,再请求用户换目标或补充信息。很多 VLA 失败不是手不灵,而是它根本没有“当前任务是否有效”的概念。
GR-3 还补了很多工程细节:
| 维度 | 关键细节 | 为什么重要 |
|---|---|---|
| 主干 | Qwen2.5-VL-3B-Instruct + flow matching Action DiT,总参数约 4B | 说明 VLA 正在用强 VLM 维持视觉语言能力,再接动作生成专家 |
| 输入 | 只接受当前时刻状态;动作块长度为 K,并和机器人状态 token 拼接 | 更像实时 policy,而不是长历史视频生成器 |
| Action DiT | 使用 VLM 后半层 KV cache、因果 attention mask、AdaLN 注入 flow matching 时间步 | 保持推理速度,同时让动作块内部有时间依赖 |
| 稳定训练 | 在 DiT attention 和 FFN linear 后加入 RMSNorm;一次 VLM forward 采多个 flow matching 时间步 | RMSNorm 对指令跟随和训练稳定性很关键 |
| 任务状态 | in progress / terminate / invalid 作为附加动作维度 |
让模型显式判断任务进度和是否应该拒绝 |
GR-3 的部署和 few-shot 也值得单独记。人类轨迹微调用 PICO 4 Ultra Enterprise 收集少量轨迹,约 450 条/小时,高于机器人遥操作约 250 条/小时,但要处理缺少腕部视图、关节和夹爪状态的问题。机器人平台侧,ByteMini 双手移动机器人使用全身顺应性控制,策略 rollout 控制 19 DoF,并加入 pure pursuit 和轨迹优化,说明 VLA 的动作块必须经过全身控制和轨迹平滑,才能在长任务里稳定。泛化抓取约 35k 机器人轨迹、101 个对象、69 小时,unseen objects 中每个对象最多 10 条人类轨迹,强调 few-shot 适配的价值在于快速接入新物体。长线桌面清理用 Flat / Instruction-Following 两种设置,invalid 任务要求 10 秒内不操纵任何对象才算成功,说明同一任务要同时考高层目标、精确指令和拒绝能力;灵巧衣物操作约 116 小时轨迹,则会暴露单纯桌面 pick-place 看不到的柔体和长时程问题。
6. Video Prediction Policy:把未来视频变成动作条件
VPP 的核心观点是:只看单张图像的 policy 容易停在静态特征,视频预测模型则能捕捉“接下来会怎么动”的动态表征。它不是直接拿未来视频当结果,而是让下游策略跟踪预测表征中的机器人运动,隐式学一个逆动力学模型。
| 阶段 | 做什么 | 关键细节 |
|---|---|---|
| 阶段一:文本引导视频预测 | 把通用 video diffusion model 微调成 manipulation TVP | 使用互联网人/机器人操作数据 + CALVIN + MetaWorld |
| 阶段二:逆动力学 | 用 TVP 中间预测表征作为条件,再用 diffusion 生成动作 | 使用中间表征可以更快,不必完整生成清晰视频 |
| 模型配置 | 1.5B Stable Video Diffusion + CLIP 文本特征 | 视频可以不够清晰,但要保留大致动态 |
| 真实机器人 | Franka Panda 约 30 任务 / 2000 轨迹;xArm + 12-DoF XHand 100+ 任务 / 4000 轨迹 | 少量机器人演示用于把视觉空间和动作空间对齐 |
这条路线和世界模型的连接非常直接:未来视频不是展示品,而是动作生成的中间条件。更有趣的是,它把“先想象未来,再反推动作”做成了一个可训练策略。
7. 动作表示:单步 action 通常不够
这条路线里反复出现“轨迹”“action chunk”“30 个锚点”“50-step chunk”“EEF pose”“控制模式”等词。这说明动作表示是 VLA 成败的底层接口。
| 动作表示 | 优点 | 风险 |
|---|---|---|
| 单步动作 | 简单,低延迟 | 容易抖动,缺少短时技能结构 |
| Action chunk | 平滑,能表达短时技能 | 错了会连续错,需要滚动重规划 |
| 末端执行器位姿 | 跨机器人相对统一 | 需要 IK / controller 转换 |
| 关节动作 | 直接控制硬件 | 跨 embodiment 很难统一 |
| 轨迹锚点 | 抽象意图,过滤低层噪声 | 需要下游控制器补细节 |
| 动作 token / 网格 | 适合 Transformer 序列建模 | 离散化可能丢精度 |
π0.5 的做法是给动作数据添加 <control mode> 来区分关节和末端执行器,并按每个数据集动作维度的 1% 和 99% 分位数归一化到 [-1, 1],不足的动作维度用零填充。这种工程细节很重要,因为跨数据集训练时,动作尺度不统一会让模型把“机器人硬件差异”误学成“任务差异”。
图源:Wikimedia Commons: Hydraulic toy robot arm gripper.jpg。动作表示最后要落到真实末端执行器:同样是“抓住”,不同夹爪的开合范围、力控能力、摩擦和接触反馈都不同。
8. 空间、深度和跨 embodiment:VLA 的下一层骨架
SpatialVLA
SpatialVLA 关注一个现实问题:不同机器人相机安装不同、动作空间不同、工作空间也不同。它用 Ego3D 位置编码把 3D 空间上下文注入视觉语言动作模型,并用自适应动作网格把连续动作离散成空间动作 token。
SpatialVLA 有几个关键设计:先用深度估计模型预测 depth,再用内参把 depth 变成点云;把点云 token 和 2D 图像 token 融合;动作侧把极坐标和旋转坐标网格化。SpatialVLA 每步只需要生成 3 个动作 token,而不是 RT-1 / RT-2 / OpenVLA 常见的 7 个 token。它先在约 110 万 / 1.1M 真实机器人数据上预训练,数据混合来自 OXE 和 RH20T 子集,再做零样本任务和新机器人适配评测。
这给 VLA 一个方向:跨机器人泛化不能只靠更大的语言模型,还要把空间和动作坐标系设计好。
DepthVLA
DepthVLA 强调深度和绝对尺度。它采用 MoT 结构,基于 π0 风格路线,使用 DA2 预训练权重,并通过尺度不变损失学习绝对尺度深度。数据上,它在 Galaxea Open-World 和 BridgeData 上预训练,在 Galaxea R1 Lite 以及 LIBERO / Simpler 等仿真环境里评估。
对抓取、放置、插入、避障来说,纯 RGB 很容易误判距离和遮挡。深度分支可以提供更稳定的空间推理,尤其适合陌生物体和复杂摆放。
X-VLA
X-VLA 用软提示处理不同数据源和 embodiment 的差异。异质性不只来自动作空间,还来自相机设置、视觉域、任务分布和数据收集协议。
X-VLA-0.9B 路线可以压成三句话:第一阶段在 DROID、RoboMind、Agibot 等异构数据上预训练,覆盖五种机械臂类型、七个平台;第二阶段为目标域新建一组 soft prompt,主干冻结后做领域适配;输入侧把固定视角/语言流和腕部视角流分开编码,低维本体感觉和 noisy action sample 通过 MLP 投影融合,动作标准化为 EEF pose,并用接下来 4 秒的 30 个锚点表示意图。
这意味着跨 embodiment 训练最好不要只换动作头,而要显式告诉模型这是哪种机器人、相机在哪里、控制模式是什么、数据来自什么任务域,以及动作统计和采集策略有什么差异。
图源:Wikimedia Commons: Baxter robot’s gripper.JPG。同样是“夹爪”,不同机器人的几何、自由度、相机位置和控制接口都可能不同;跨 embodiment VLA 的难点就在这里。
9. 数据 recipe:不要只收“干净演示”
这些资料里反复出现的“发现”非常值得展开:一些 VLA 指令跟随能力存在问题,可能过拟合图像;很多系统缺乏当前任务执行状态判断能力,需要学会拒绝任务;主线越来越像跨领域、跨数据集预训练,再在专用场景下微调并评测;现有模型规模可能偏小,很多低于 3B;数据也常常太干净,缺乏能暴露恢复、遮挡、干扰和拒绝能力的脏数据。
GEN-0 官方博客 给了一个激进版本:他们报告 270,000 小时级真实世界操作数据、每周继续增长,并观察到 7B 附近的模型规模阈值和更大模型的收益。无论是否采用它的全部主张,这至少说明机器人领域正在从“小模型 + 小数据 demo”走向“数据工厂 + 大模型 + 长任务”的阶段。
Spirit-v1.5 的思路则提醒另一件事:高度脚本化、摆放整齐、总是成功的数据,可能会让模型缺少恢复、转换和真实混乱环境经验。开放式、目标驱动的数据收集让操作者围绕高层目标即兴完成多种子任务,更像真实世界的一天。
把 GEN-0 和 Spirit-v1.5 放在一起看,会得到一组很清晰的数据观:
| 路线 | 关键数字 / 机制 | 对数据 recipe 的启发 |
|---|---|---|
| GEN-0 | 10B+ 参数;7B 附近出现模型规模阈值;270k+ 小时真实操作数据;每周增加 10k+ 小时;覆盖 6 / 7 / 16+ DoF 平台 | 具身 scaling 需要模型、数据、计算和跨平台经验一起扩大 |
| Harmonic Reasoning | 让异步、连续时间的感知 token 和行动 token 形成交互 | 推理不能阻塞行动,行动也不能脱离感知流 |
| GEN-0 数据科学 | 低 MSE + 低 reverse KL 更适合下游微调;高 MSE + 低 reverse KL 更有多样性,可能更适合 RL | 数据混合会塑造模型性格,不能只看总量 |
| Spirit-v1.5 | 只设高层目标“做些有用的事”,让操作者在连续会话中即兴完成多种子任务 | 开放式数据能保留恢复、转换和真实混乱环境 |
| Spirit-v1.5 采集效率 | 有效收集时间增加约 200%,研究人员关注度降低约 60%;多样化预训练达到基线性能只需约 60% 迭代 | 更自然的数据采集可能同时提高多样性和边际效率 |
一个更健康的数据 recipe 不应只收成功演示。成功演示负责教会基本任务,失败轨迹让模型知道哪里会坏,人工纠正让模型学会从自己造成的状态恢复,无效指令训练拒绝和请求澄清,脏场景覆盖干扰物、遮挡和非理想摆放,长时连续任务训练子任务转换和任务进度判断,跨机器人数据则让模型学习共享物理技能而不是绑定某个硬件。
10. RECAP:从坏经验里提取好训练信号
RECAP / π0.6 路线可以概括为一句话:如果策略只是复制过去行为,它也会复制过去错误。要从自主经验中进步,必须做信用分配。
RECAP 的思路是先用离线 RL 预训练 VLA,再在部署中收集真实结果和稀疏奖励;机器人犯错时由专家接管并给出纠正,随后训练价值函数判断哪些状态更接近成功,并根据优势信号提取更好的策略。
这和世界模型的数据引擎高度一致:不是所有失败都一样。若机器人最后插不进咖啡粉罐,错误可能发生在早期抓取姿态,而不是最后插入动作。没有价值函数、世界模型或分阶段任务状态,系统很难把责任分配到正确动作。
11. 暂存但未展开的线索
还有一些值得进入后续专题的线索,但它们不必打断本文主线。LingBot-VA / Motus 可以接到视频世界模型和 VLA 记忆机制;Unitree UnifoLM-VLA-0 适合跟硬件生态和开源机器人平台一起整理;Octo 可以放入跨 embodiment robot policy 与动作接口章节;Helix / Hi Robot 更适合和 π0.5、GEN-0、Spirit 一起讨论开放家庭任务和数据工厂路线;VO-DP 则可以放到世界模型与动作扩散的交叉章节。这样正文主线保持清楚,后续材料也有归宿。
12. 评测路线:从离线预测到真实闭环
具身智能评测至少要分四层:
| 层级 | 看什么 | 示例 |
|---|---|---|
| 离线预测 | action MSE、next-action error、任务状态分类 | 先确认模型能拟合数据 |
| 仿真闭环 | success rate、碰撞、超时、重试次数 | CALVIN、LIBERO、RoboTwin、ManiSkill |
| 真实机器人 | 成功率、恢复成功率、人工接管率、任务耗时 | 新物体、新场景、新家庭 |
| 安全和可用性 | invalid refusal、near-miss、力/速度边界、可解释失败 | 部署前门禁 |
Flat / Instruction-Following Setting 很有用:同一个桌面清理任务,可以给高层目标“清理桌面”,也可以给具体子任务。前者考任务分解和语义选择,后者考指令跟随和低层操作。一个模型在 Flat Setting 强,不等于在精确指令跟随强。
具身智能最终要看闭环。动作 MSE 很低的模型可能在真实执行中积累误差;success checker 很高的策略可能只钻了最终状态规则空子;语言跟随很好也不代表接触稳定。闭环日志和失败分析才是硬证据。
13. 一个推荐学习和落地顺序
如果要继续扩展具身项目,建议先选任务族,比如桌面操作、长时家务、焊缝观察或双臂传递,不要一开始泛化到所有机器人;随后定义动作接口,明确关节、EEF、轨迹锚点、action chunk 和控制模式;再定数据 schema,把图像、depth、相机、关节、本体状态、动作、任务状态和语言固定下来;早筛可以先用 CALVIN / LIBERO / RoboTwin / Simpler 看趋势;训练和评测必须加入 in progress / terminate / invalid 任务状态;数据侧要保留失败和纠正,不只收成功演示;候选动作进入真实执行前,最好先经过世界模型的风险、可见性、可达性和未来状态预测;真实小闭环每轮只扩大一个维度,新物体、新背景、新任务、新机器人不要全一起变。
这条路线听起来朴素,但很抗返工。具身智能最怕的是先把模型训大,最后发现动作接口、任务状态、success checker 和数据回流都没定。
14. 参考资料
- RT-1: Robotics Transformer:真实机器人 Transformer policy 的经典入口。
- Open X-Embodiment:跨机器人公开数据集和 RT-X 模型。
- DROID Dataset:in-the-wild 机器人操作数据集。
- π0.5 论文专题讲解:异构协同训练和开放世界家庭任务。
- GR-2 论文专题讲解:web-scale 视频知识迁移到真实机器人操作。
- Video Prediction Policy 论文专题讲解:预测视觉表征到逆动力学策略的路线。
- SpatialVLA 论文专题讲解:Ego3D 位置编码和自适应动作网格。
- GR-3 论文专题讲解:任务状态、少样本人类轨迹和长时程机器人部署。
- DreamZero 论文专题讲解:WAM 如何把未来视频与动作联合建模为 zero-shot policy。
- GEN-0: Embodied Foundation Models That Scale with Physical Interaction:大规模真实物理交互数据和具身模型 scaling 观察。
- Spirit-v1.5:开放式、目标驱动、多样化机器人数据采集。
- Isaac Sim、RoboTwin 和 ManiSkill:仿真、数据生成和评测工具链。
- Title: 具身智能:VLA 数据、模型与评测路线
- Author: Charles
- Created at : 2025-06-18 09:00:00
- Updated at : 2025-06-18 09:00:00
- Link: https://charles2530.github.io/2025/06/18/ai-files-embodied-ai-vla-data-model-and-evaluation-roadmap/
- License: This work is licensed under CC BY-NC-SA 4.0.