
算子与编译器:Profiling、调试与数值稳定
很多 kernel 优化最后不是败在“不会写更快代码”,而是败在三件事上:没有正确测量,优化方向从一开始就错了;没有可靠验证,性能上去了但结果悄悄错了;没有处理数值稳定性,速度和精度之间出现不可接受的偏差。
成熟算子工程不是“会写 kernel”,而是建立从热点识别、性能定位、正确性验证到数值验收的完整闭环。
Profiling 先于优化
AI 系统里的直觉经常误导人:
- 以为 GEMM 是瓶颈,实际热点是 layout transform;
- 以为 decode 慢是模型太大,实际是 kernel launch 太碎;
- 以为量化没提速是算法问题,实际是 dequant kernel 带宽受限;
- 以为 occupancy 太低,实际卡在 shared memory bank conflict。
任何 serious optimization 都应从 profile 开始,而不是从改代码开始。优化前要明确:问题发生在系统调度、单 kernel、内存访问、微架构利用率,还是数值回退路径。
三层 Profiling 视角
| 层级 | 关注点 | 常用工具 |
|---|---|---|
| 系统级 | 请求流、prefill/decode、通信、I/O、CPU/GPU 重叠 | Nsight Systems、serving trace、PyTorch profiler timeline |
| Kernel 级 | 单个 kernel 时间、launch 次数、shape 分布、调用路径 | PyTorch Profiler、框架 trace、自定义日志 |
| 微架构级 | 带宽、occupancy、warp stall、Tensor Core、cache 行为 | Nsight Compute、硬件计数器 |
只看系统级,知道哪段慢但不知道为什么;只看 kernel 级,知道哪个 kernel 慢但不知道是否被调度放大;只看微架构级,容易局部最优。有效工作流是在三层之间来回切换。
Nsight Systems:先看系统时间线
Nsight Systems 更像“端到端时间线显微镜”,适合先回答这些问题:GPU 是否持续有活干,CPU 线程是否被 I/O、锁、Python 调度或同步调用挡住,CUDA API 和 GPU kernel 是否能对应起来,cuBLAS/cuDNN/NCCL 是否在预期阶段出现,以及 NVTX 标注出来的模型阶段是否真的互相重叠。
它和 Nsight Compute 的分工很清楚:Nsight Systems 先定位哪段时间和哪条链路可疑;Nsight Compute 再解释某个 kernel 的 occupancy、warp stall、memory throughput、Tensor Core 利用率等微架构原因。一个实用顺序是:
- 用 Nsight Systems 看端到端 timeline、空洞、同步和通信裸露时间;
- 在 timeline 里选出真正影响 wall-clock 的 kernel 或阶段;
- 再用 Nsight Compute / microbenchmark 下钻,不要反过来先挑一个看起来慢的 kernel 优化。
常用起步命令可以写成下面这样,具体 trace 项按环境和开销裁剪:
下面代码块优先看 shape、缓存、状态更新或资源申请相关行;这些行通常决定故障是语义、并发还是容量问题。
1 | nsys profile --trace=cuda,cudnn,cublas,osrt,nvtx -o trace python train.py |
命令口径参考:Nsight Systems User Guide 中 nsys profile 与 --trace 选项说明。User Guide 也说明 CUDA trace 会收集 CUDA API trace 和 CUDA workload trace,后者包括 GPU 上的 memory operation 与 kernel execution。

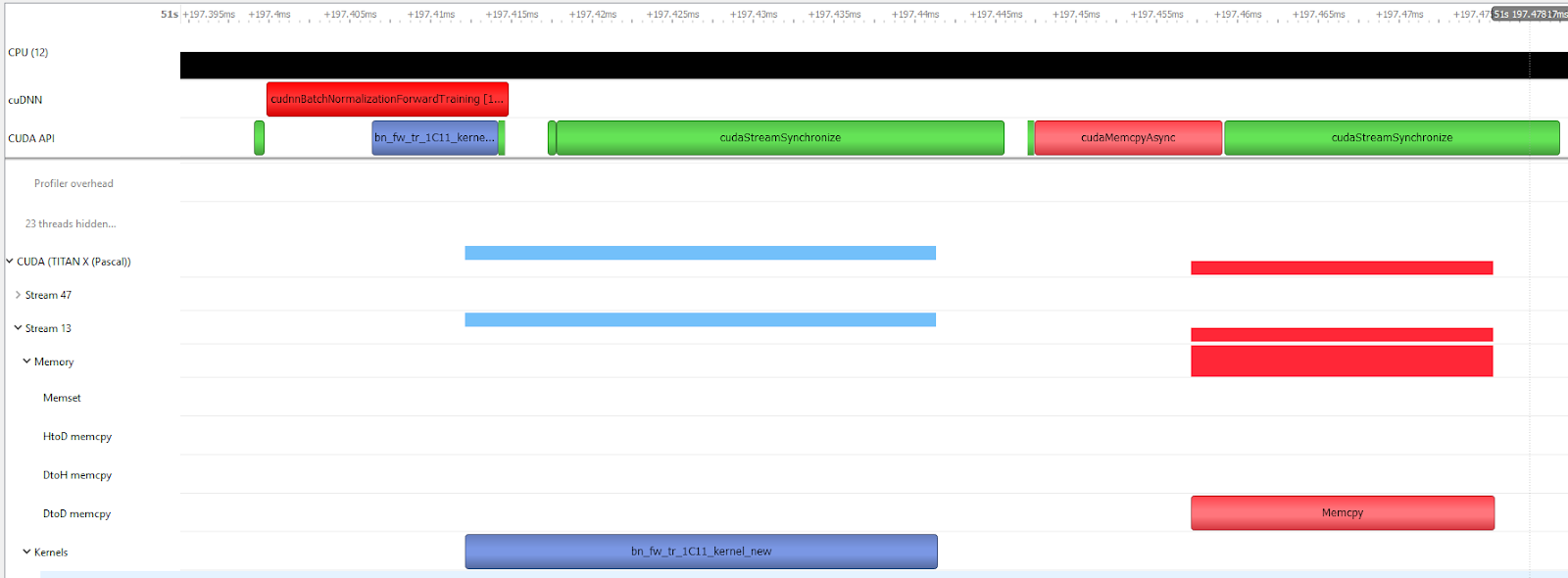
图源:Nsight Systems Exposes New GPU Optimization Opportunities,Figure 2。博客截图意:在 GPU kernel 事件上可以回溯到对应的 CPU-side CUDA API launch,从而把 GPU 端空洞和 host 端调度原因连起来。
从 GPU 事件追回 CPU 调度。
做算子优化时,不要只盯 GPU row。一个 kernel 后面的空洞,可能来自 CPU 线程没及时发起下一次 launch,也可能是框架 runtime、Python、数据准备或锁等待挡住了调度。Nsight Systems 的价值就在于把 GPU stream、CUDA API、CPU thread 和 NVTX range 放到同一条时间线上。
图源:Nsight Systems Exposes New GPU Optimization Opportunities,Figure 3。博客截图意:CPU 端显式同步可能让原本可异步排队的 GPU 工作被切开,形成不必要等待。
误同步会伪装成 kernel 慢。
如果每个小算子后面都接 cudaDeviceSynchronize、cudaStreamSynchronize、阻塞式 D2H copy 或框架里的隐式 sync,timeline 会变成“跑一点、停一下”。这时先删同步、改事件依赖或重排 stream,往往比重写 kernel 更有效。
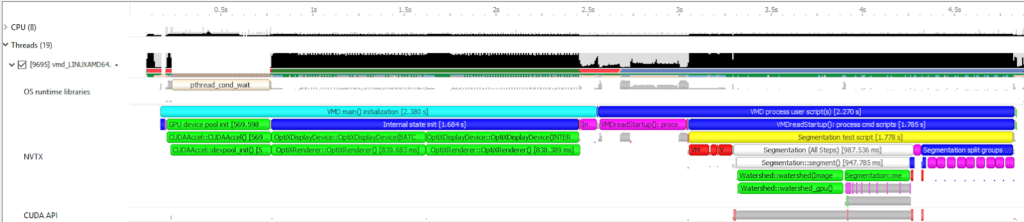
图源:Nsight Systems Exposes New GPU Optimization Opportunities,Figure 6。博客截图意:NVTX range 可以把应用阶段标到 timeline 上,让 kernel、通信和 CPU 逻辑更容易归因。
实践习惯:给 trace 加语义。
对训练和推理系统,建议用 NVTX 标出 dataloader、prefill、decode、attention、moe_dispatch、all_reduce、optimizer_step、graph_capture 等阶段。没有 NVTX 的 trace 只能看到一堆 kernel 名;有 NVTX 后,才能把“哪个业务阶段慢”与“哪个 kernel / copy / collective 慢”对齐。
Microbenchmark 要可信
微基准很容易夸大收益。较稳妥的原则是:
- 充分 warmup,排除 JIT、memory pool、cache 和 graph capture 前置成本;
- 固定 shape、dtype、layout 和输入分布;
- 区分单 kernel 时间与端到端时间;
- 覆盖真实 shape 分布,而不是只测最漂亮的整齐形状;
- 报告平均值、p95/p99 和长尾 shape;
- 明确是否包含编译、autotune、cache miss 和 fallback。
真实系统中 shape 往往不固定。一个 kernel 在某个整齐 shape 下极快,到了 batch、sequence、head dim、量化 group 变化时可能明显退化。优化结论必须按真实 workload 分桶报告。
关键指标怎么读
| 指标类 | 看什么 | 常见解释 |
|---|---|---|
| 时间 | latency、throughput、launch 次数、TTFT、TPOT、step time | 判断端到端是否真的变快 |
| 资源 | SM 利用率、Tensor Core、DRAM throughput、shared memory、register、occupancy | 判断算力或带宽是否被用起来 |
| 结构 | warp stall、branch divergence、cache hit/miss、load/store efficiency | 判断为什么没跑满 |
| 数值 | 误差、溢出、归约差异、低精度 scale | 判断是否安全可替换 |
Roofline 是很好的先验判断器。若 kernel 算术强度低且 DRAM throughput 已接近上限,继续做算术优化收益很小;若理论上应是 Tensor Core 热点但 Tensor Core 利用率很低,说明 tile、layout 或 dtype 路径可能有问题。
正确性验证
任何优化都必须先通过正确性验证。基础做法包括:
- 与参考实现逐元素对比;
- 覆盖多种 shape、dtype、layout 和边界 mask;
- 测随机输入、极值输入、全零、全同值、非连续 stride;
- 测训练与推理路径;
- 测多步迭代误差是否放大;
- 固定 seed 和输入,保证可复现。
“看起来差不多”远远不够。一个归一化 kernel 某些边界块少算一个元素,单次误差可能很小,多层叠加后会明显偏航。低精度、softmax、attention、norm、optimizer kernel 都应有更严格的误差阈值和边界样本。
数值稳定性是一等公民
AI 算子不仅要算得快,还要在低精度、长序列和大动态范围下稳定。常见问题包括:
- softmax overflow / underflow;
- 方差计算误差;
- FP16/FP8 累加损失;
- quant scale 过大或过小;
- 原子加法和归约顺序导致非确定性;
- fused kernel 改变了高精度边界。
Softmax 通常写成:
减去最大值是为了避免指数爆炸。FlashAttention 这类分块实现还要维护在线最大值与归一化项,既减少 I/O,又保持数值精确。LayerNorm、RMSNorm、variance 计算则需要关注 Welford、FP32 accumulation 或其他稳定统计方法。
低精度验收
不同低精度类型风险不同:
| 类型 | 主要风险 | 验收重点 |
|---|---|---|
| FP16 | 动态范围窄,易 overflow/underflow | loss scale、FP32 accumulate、极值输入 |
| BF16 | 范围大但尾数少 | 长期误差、归约和 optimizer 路径 |
| FP8 | 强依赖 scaling 和校准 | amax、scale 粒度、溢出/下溢、敏感层 |
| INT8/INT4 | 依赖量化尺度和校准数据 | scale、zero point、outlier、累加精度 |
低精度 kernel 不能只看单层误差。要看长序列、多层堆叠、训练反向、端到端任务指标和异常 bucket。尤其是 FP8/INT 相关 kernel,scale 的读取、更新、广播和融合边界都可能成为真实 bug 来源。
调试闭环
一个实用闭环是:
- 用系统 trace 找到真实热点;
- 用 kernel profile 判断瓶颈类型;
- 用 microbenchmark 验证单点优化;
- 用参考实现做正确性和数值对齐;
- 用真实 workload 分桶验证端到端收益;
- 把 shape、dtype、误差阈值和性能基线写入回归测试;
- 记录硬件、驱动、编译器、框架和 kernel 版本。
flowchart LR
A["系统 trace"] --> B["定位阶段"]
B --> C["kernel profile"]
C --> D["瓶颈归因"]
D --> E["实现修改"]
E --> F["正确性对齐"]
F --> G["真实 workload 分桶"]
G --> H["端到端收益"]
H --> I["回归测试"]
I --> A
这张闭环图的重点是不要跳步。只做系统 trace,容易不知道 kernel 为什么慢;只做 microbenchmark,容易不知道端到端有没有收益;只做性能,不做正确性,低精度和归约类 kernel 会埋隐患。
算子优化的基本纪律是:没有 profiling,不谈优化;没有正确性,不谈性能;没有端到端验证,不谈上线收益。
世界模型算子的硬证据模块
如果优化对象服务世界模型 rollout,profiling 报告要比通用 LLM 多三项:候选动作排序是否变、风险校准是否变、长时 latent 是否漂。
| 证据项 | 最小可复算例子 | 失败案例 | 验收指标 |
|---|---|---|---|
| 本页解决哪项成本 | 单 kernel、端到端 rollout、闭环 loop 三层时间线 | kernel 2x,端到端只有 1.05x | kernel latency、loop latency、Amdahl breakdown |
| 正确性 | 与 BF16/reference 比较未来 latent、event、risk | 逐元素误差小,但 top-1 动作排序翻转 | ranking agreement、event F1 |
| 数值稳定 | 长 horizon 反复 rollout 误差曲线 | 8s 后对象漂移,短测不暴露 | latent drift、object permanence |
| 低精度路径 | scale、dequant、fallback 和 layout transform 计入 trace | 量化 kernel 快,前后 cast 慢 | kernel hit rate、dequant count |
| 闭环回归 | 固定 hard replay 和小闭环任务桶 | profiler 显示快,但 near-miss 漏报 | near-miss recall、cost per success |
一个世界模型 kernel PR 的证据不应只写“attention kernel 快 1.6x”。更稳的写法是:视频 latent attention kernel 1.6x,端到端候选 rollout 1.23x;与参考实现相比 top-1 candidate ranking agreement 99.4%,risk ECE 变化 +0.002,hard replay 无新增 false negative。
相关阅读与下一步
- 外部材料:NVIDIA CUDA C++ Programming Guide。
- 外部材料:Triton 文档。
- 外部材料:CUTLASS 文档。
- 站内下一步:算子与编译器专题。
- 站内下一步:CUDA 编程模型与内存层次。
- 站内下一步:Triton 编程模型与自动调优。
- Title: 算子与编译器:Profiling、调试与数值稳定
- Author: Charles
- Created at : 2025-08-23 09:00:00
- Updated at : 2025-08-23 09:00:00
- Link: https://charles2530.github.io/2025/08/23/ai-files-operators-profiling-debugging-and-numerical-stability/
- License: This work is licensed under CC BY-NC-SA 4.0.