
论文专题讲解:DPM-Solver++:为 Guidance 场景设计的扩散 ODE 求解器
这页先按“论文证据节点”读:先问它解决哪一个瓶颈,再看核心图表、实验 setting 和不能外推的边界。背景概念先回 论文专题讲解 和 扩散模型。
前置:不必先读完所有相关论文,但要知道本篇的输入、训练/推理路径和评测口径分别对应什么。
主线关系:读完后把结论回填到「扩散模型」路线里,判断它改变的是机制、成本、数据配方、评测口径,还是仍停留在前沿假设。
- 论文:
DPM-Solver++: Fast Solver for Guided Sampling of Diffusion Probabilistic Models - 链接:arXiv:2211.01095
- 代码:LuChengTHU/dpm-solver
- 期刊版本:
Machine Intelligence Research,2025 - 关键词:diffusion ODE、guided sampling、classifier-free guidance、data prediction、dynamic thresholding、multistep solver、training-free sampler
DPM-Solver++ 解决的是扩散模型推理里很实用的问题:已经有一个训练好的扩散模型,不想再蒸馏或重训,只想在 classifier guidance / classifier-free guidance 下把采样步数从上百步压到 15 到 20 步,还不要因为 guidance scale 大而炸图。
它不是 DPM-Solver 的简单改名,而是针对 guided sampling 改了三件事:
- 从
noise prediction视角转到data prediction视角求解扩散 ODE; - 用 thresholding 把预测的 拉回训练数据范围,缓解大 guidance scale 导致的 train-test mismatch;
- 用 multistep 形式复用历史函数值,在相同 NFE 下缩小有效步长,提升少步稳定性。
它的效率贡献是什么
| Dimension | DPM-Solver++ |
|---|---|
| Saved cost | Sampling NFE / latency; no extra training or distillation |
| Main target | Guided sampling under classifier guidance or classifier-free guidance |
| Main idea | Solve diffusion ODE with data prediction model , then use thresholding and multistep updates |
| Typical result | High-quality guided samples in about 15-20 NFE |
| Training cost | No model training; uses pretrained DPMs directly |
| Main risk | Very few steps still depend on schedule, guidance scale, thresholding, and model parameterization |
| Connect to | 采样与推理加速、扩散方法对照表、噪声日程与参数化 |
论文位置
扩散加速大致有两条路线:
| Route | Need retraining? | What it changes | Examples |
|---|---|---|---|
| Fast sampler / solver | No | Sampling path or ODE/SDE discretization | DDIM, Euler, Heun, DPM-Solver, DPM-Solver++ |
| Distillation / consistency | Yes | Student model or generation mapping | Progressive Distillation, LCM, DMD, DMD2 |
DPM-Solver++ 属于第一类。它的工程价值是:如果你已经有 Stable Diffusion、Imagen/DeepFloyd 这类 pretrained diffusion model,它可以直接作为 scheduler / sampler 接上去,而不是重新训练一个少步学生。
论文的直接前作是 DPM-Solver。DPM-Solver 在无 guidance 或弱 guidance 采样里很强,但 DPM-Solver++ 指出:在大 guidance scale 下,原先的高阶求解器可能不但不快,反而比一阶 DDIM 更不稳定。
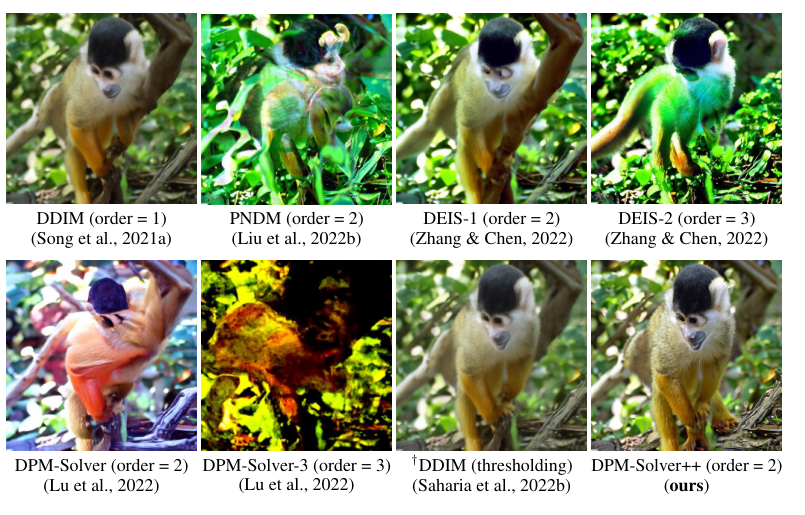
图源:DPM-Solver++,Figure 1。原论文图意:在 ImageNet 256×256、classifier guidance scale 8.0、15 NFE 下,若直接使用此前高阶 solver,图像会明显失真;DPM-Solver++ 能生成更稳定的样本。
输入输出:输入是 guided diffusion ODE/SDE 的 noisy state 和少量时间步,输出是更稳定的采样轨迹。
效率机制:改进 solver 以减少采样步数,尤其面向 guidance 场景的数值稳定。
对主线意义:它服务视频/rollout 预览成本,但属于采样器证据。
不能证明什么:少步采样质量不能证明动作因果、世界模型规划或真实闭环收益。
这张图的判断不是“高阶 solver 总是更好”,而是相反:guidance 会放大模型输出和导数,大步长高阶展开可能超出收敛半径。DPM-Solver++ 的目标,就是让少步高阶求解器在大 guidance scale 下仍然稳定。
数学主线一:扩散采样为什么能写成 ODE 求解
连续时间扩散模型的前向加噪可以写成:
这里 的三个位置分别是:被采样/评估的带噪样本 ,均值 ,协方差 。
也就是:
是标准高斯噪声采样, 是均值, 是单位协方差; 再把这份标准噪声缩放到当前噪声水平。
这里 控制 signal-to-noise ratio。论文把 logSNR 定义为:
扩散模型常见的 noise prediction 模型是:
同一个模型也能换成 data prediction:
这条式子很关键:它说明 noise prediction 和 data prediction 表达的是同一个去噪信息,但求解器看到的变量不同。DPM-Solver++ 的核心转向就是:不要再围绕 的 ODE 设计高阶积分,而是围绕 的 ODE 设计。
数学主线二:Guidance 为什么会让高阶求解器不稳
classifier guidance 写成:
classifier-free guidance 写成:
当 guidance scale 变大时,两个问题会一起出现:
- 的幅值变大,ODE 更新容易过冲;
- 对 和 的高阶导数也被放大,高阶 Taylor 近似的有效收敛半径变小。
所以“高阶方法在少步下更准”这个判断有前提:方向场要足够平滑,步长要落在收敛半径内。大 guidance scale 会破坏这个前提。
还有一个 train-test mismatch。训练数据通常被归一化到有界区间,例如图像像素在 。但大 guidance scale 可能把最终 推出这个范围,产生过饱和、不自然的图像。论文因此把 data prediction 和 thresholding 放在一起:既然 直接预测干净样本,就可以对它做 clipping / dynamic thresholding,把结果拉回训练数据支持范围。
数学主线三:DPM-Solver 和 DPM-Solver++ 的 exact solution 差在哪里
DPM-Solver 从 noise prediction 形式出发。给定 ,它把 diffusion ODE 的解写成:
这个式子把线性项 精确算掉,剩下只需要近似一个关于 的指数加权积分。
DPM-Solver++ 换成 data prediction 形式,得到另一条等价但不同的 exact solution:
注意这两个式子虽然描述同一个 diffusion ODE,但作为数值求解器的起点不同:
| Solver family | Exact linear term | Approximate integral |
|---|---|---|
| DPM-Solver | ||
| DPM-Solver++ |
这就是 ++ 的数学核心。它不是只把模型输出从 换算到 ,而是重新围绕 写 exact solution,再对新的积分项做 Taylor 近似。
数学主线四:Taylor 展开怎么变成算法
从 走到 ,设:
对 在 附近做 阶 Taylor 展开:
代回 exact solution:
右侧的积分可以解析计算;难点变成估计 对 的导数。论文主要使用二阶版本 ,因为更高阶在大 guidance scale 下更容易不稳。
一阶特例就是 DDIM。二阶可以有两种做法:
- Singlestep 2S:在 和 中间额外取一个 ,用 和 估计导数;
- Multistep 2M:复用前两步的 、,不额外插中间点。
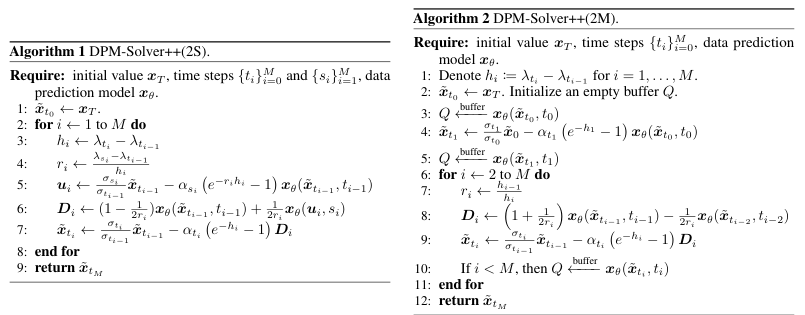
图源:DPM-Solver++,Algorithm 1/2。原论文图意:DPM-Solver++(2S) 使用 singlestep 中间点;DPM-Solver++(2M) 使用 multistep buffer 复用历史 预测。
2M 的优势不是“阶数更高”,而是在固定 NFE 下能走更多外层时间步。二阶 singlestep 每个大步需要额外中间模型调用;multistep 则复用历史函数值,所以有效步长更小,少步采样时通常更稳。
和其它 exponential integrator solver 的关系
论文 Table 1 把 DPM-Solver++ 放到 DEIS、DPM-Solver 的谱系里。下面按原英文列名重绘。
| DEIS | DPM-Solver | DPM-Solver++ | SDE-DPM-Solver++ | |
|---|---|---|---|---|
| First-Order | DDIM | DDIM | DDIM | DDIM |
| Model Type | ||||
| Taylor Expansion | for | for | for | for |
| Solver Type (High-Order) | Multistep | Singlestep | Singlestep + Multistep | Multistep |
表源:DPM-Solver++,Table 1。这里保留原始英文行列名。
算一遍:为什么 15 到 20 NFE 很有用
在 Stable Diffusion 这类 classifier-free guidance 采样里,一个 NFE 往往意味着一次 denoiser 前向;如果没有 guidance batching,CFG 还要跑 conditional 和 unconditional 两次。粗略看:
| Sampler | NFE | Denoiser calls with CFG |
|---|---|---|
| DDIM old setting | 100 |
~200 |
| DDIM old high quality | 250 |
~500 |
| DPM-Solver++ few-step | 20 |
~40 |
| DPM-Solver++ aggressive | 15 |
~30 |
从 100 NFE 到 20 NFE,理论上 denoiser 调用数降低约 5x;从 250 NFE 到 20 NFE,降低约 12.5x。真实系统里还会受到 VAE、text encoder、scheduler overhead、batching 和 kernel 吞吐影响,但瓶颈通常仍在 denoiser,因此少步 solver 的收益非常直接。
这也解释了 DPM-Solver++ 为什么被大量 scheduler 采用:它不用额外训练,不改变模型权重,却能立刻降低交互式生成、批量生成和多候选 rerank 的推理成本。
实验设置
论文的训练相关结论很简单:**DPM-Solver++ 不训练模型。**它用已有 pretrained diffusion model 做采样器评测。
| Item | Setting |
|---|---|
| Pixel-space DPM | ImageNet 256×256 pretrained DPMs from ADM / Diffusion Models Beat GANs (Dhariwal & Nichol, 2021) |
| Guidance | Classifier guidance; guidance scale |
| Metric | FID, lower is better |
| Samples for FID | 10K samples |
| Latent-space DPM | Stable Diffusion on MS-COCO2014 validation |
| Latent metric | L2 / MSE to 1000-step DDIM reference, lower is better |
| DeepFloyd-IF | Qualitative pixel-space guided sampling |
| Training | No training, no fine-tuning, no distillation |
这里最重要的是最后一行。DPM-Solver++ 是 inference-side method。它改善的是采样路径和数值稳定性,不会让 denoiser 本身学到新分布;如果 pretrained model 本身不会某类结构,solver 只能减少采样误差,不能补能力。
消融结果:为什么必须三件事一起做
Figure 3 的三个子图分别对应本文三步改造:从 到 、从 singlestep 到 multistep、加不加 thresholding。
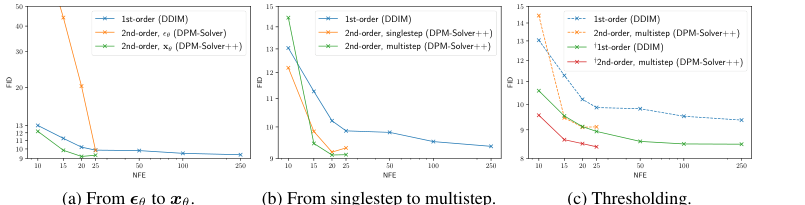
图源:DPM-Solver++,Figure 3。原论文图意:在 ImageNet 256×256、guidance scale 8.0 下,比较 DPM-Solver++ 的参数化、singlestep/multistep 和 thresholding 消融。
左图说明换成 参数化后,二阶 solver 不再像原 DPM-Solver 那样在大 guidance 下崩坏;中图说明 multistep 在少 NFE 下更快接近低 FID;右图说明 thresholding 对大 guidance 的有界图像数据很关键。DPM-Solver++ 的稳定性来自三者组合,而不是单个 trick。
Figure 4 展示更完整的步数和 guidance scale 变化。
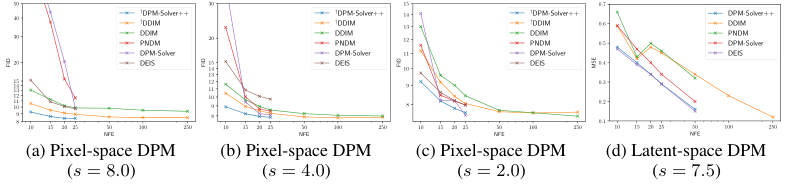
图源:DPM-Solver++,Figure 4。原论文图意:在 pixel-space DPM 和 latent-space DPM 中比较不同 sampler 随 NFE 变化的 FID/MSE。
横轴是 NFE,也就是 denoiser 前向次数;纵轴是 FID 或 MSE,越低越好。先比较同一个 NFE 下不同颜色曲线的位置,再看曲线随 NFE 增加是否平稳下降。Figure 4 支撑的结论是 DPM-Solver++ 在 15 到 25 NFE 附近能接近更多步 DDIM 的质量,尤其在 latent-space DPM 里 multistep 版本更省前向调用;它不能证明任意 prompt、任意 CFG scale 都可以无损降到极低步数。
表格结果:保留原英文格式看关键数字
下面重绘 Table 3 中最能说明 guided sampling 的关键行:ImageNet 256×256、guidance scale 8.0。列名保留原始英文。
| Guidance Scale | Thresholding | Sampling Method \ NFE | 10 | 15 | 20 | 25 | 50 | 100 | 250 |
|---|---|---|---|---|---|---|---|---|---|
| 8.0 | No | DDIM | 13.04 | 11.27 | 10.21 | 9.87 | 9.82 | 9.52 | 9.37 |
| 8.0 | No | DPM-Solver-2 | 114.62 | 44.05 | 20.33 | 9.84 | \ | \ | \ |
| 8.0 | No | DPM-Solver-3 | 164.74 | 91.59 | 64.11 | 29.40 | \ | \ | \ |
| 8.0 | No | DPM-Solver++(S) (ours) | 12.20 | 9.85 | 9.19 | 9.32 | \ | \ | \ |
| 8.0 | No | DPM-Solver++(M) (ours) | 14.44 | 9.46 | 9.10 | 9.11 | \ | \ | \ |
| 8.0 | Yes | DDIM | 10.58 | 9.53 | 9.12 | 8.94 | 8.58 | 8.49 | 8.48 |
| 8.0 | Yes | DPM-Solver++(S) (ours) | 9.26 | 8.93 | 8.40 | 8.63 | \ | \ | \ |
| 8.0 | Yes | DPM-Solver++(M) (ours) | 9.56 | 8.64 | 8.50 | 8.39 | \ | \ | \ |
表源:DPM-Solver++,Table 3。此处只重绘 guidance scale 8.0 的关键行,保留原表英文列名和 NFE 口径。
这张表最值得看的不是某一个最小值,而是三个趋势:
- 原 DPM-Solver 在
10/15/20NFE 且大 guidance 下 FID 可能极高,说明高阶 solver 不稳; - DPM-Solver++ 在
15-25NFE 已接近 DDIM50-250NFE; - thresholding 让大 guidance 下的低 NFE 结果明显更稳。
latent-space Stable Diffusion 里,论文用 MSE 到 1000-step DDIM 参考结果衡量收敛。Table 4 的核心行如下:
| Guidance Scale | Thresholding | Sampling Method \ NFE | 10 | 15 | 20 | 25 | 50 | 100 | 250 |
|---|---|---|---|---|---|---|---|---|---|
| 7.5 | No | DDIM | 0.59 | 0.42 | 0.48 | 0.45 | 0.34 | 0.23 | 0.12 |
| 7.5 | No | DPM-Solver++(S) (ours) | 0.48 | 0.41 | 0.36 | 0.32 | 0.19 | \ | \ |
| 7.5 | No | DPM-Solver++(M) (ours) | 0.49 | 0.40 | 0.34 | 0.29 | 0.16 | \ | \ |
| 15.0 | No | DDIM | 0.83 | 0.78 | 0.71 | 0.67 | \ | \ | \ |
| 15.0 | No | DPM-Solver++(S) (ours) | 0.88 | 0.75 | 0.68 | 0.61 | \ | \ | \ |
| 15.0 | No | DPM-Solver++(M) (ours) | 0.84 | 0.72 | 0.64 | 0.58 | \ | \ | \ |
表源:DPM-Solver++,Table 4。原表在 COCO2014 validation 上评估 Stable Diffusion latent-space DPM。
图像样例:ImageNet、Stable Diffusion、DeepFloyd

图源:DPM-Solver++,Figure 5。原论文图意:ImageNet 256×256、guidance scale 8.0 下,不同 sampler 的图像质量对比。
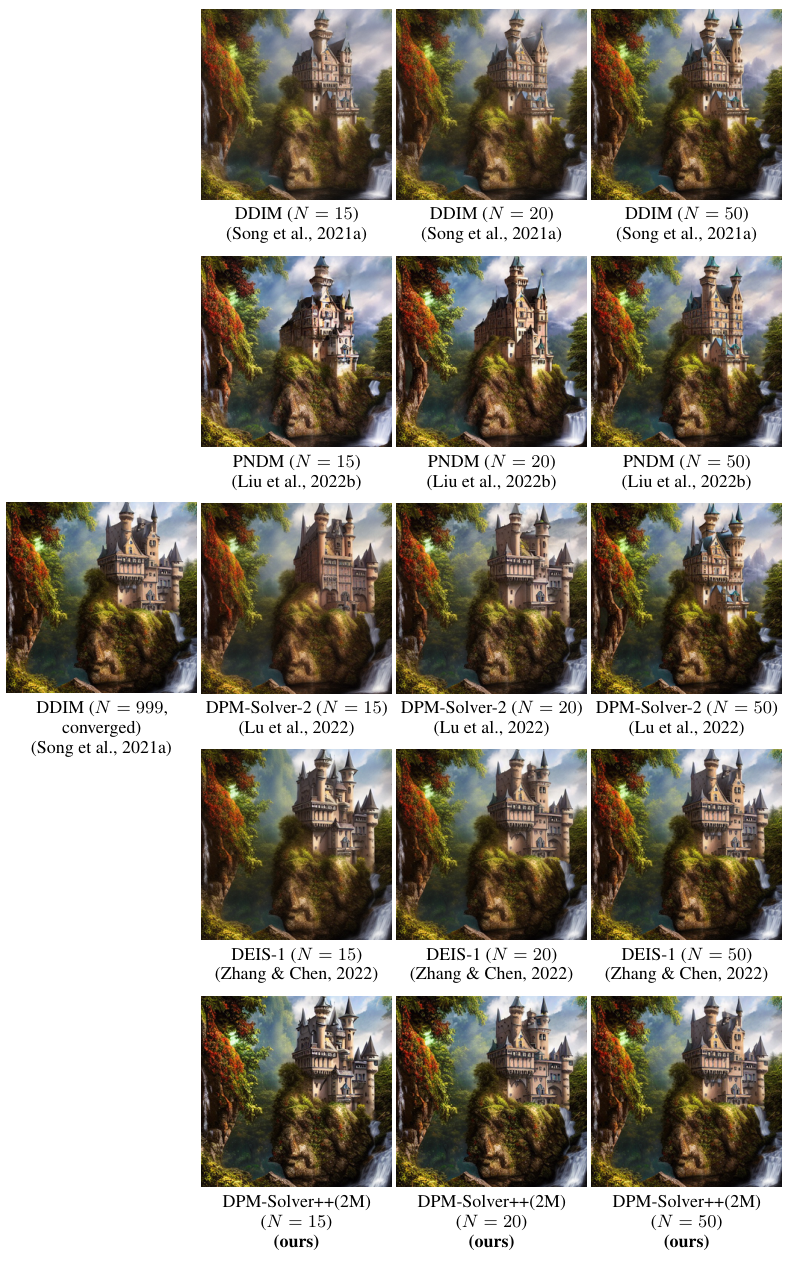
图源:DPM-Solver++,Figure 6。原论文图意:Stable Diffusion 在 classifier-free guidance scale 7.5 下,不同 sampler 和 NFE 的样例对比。
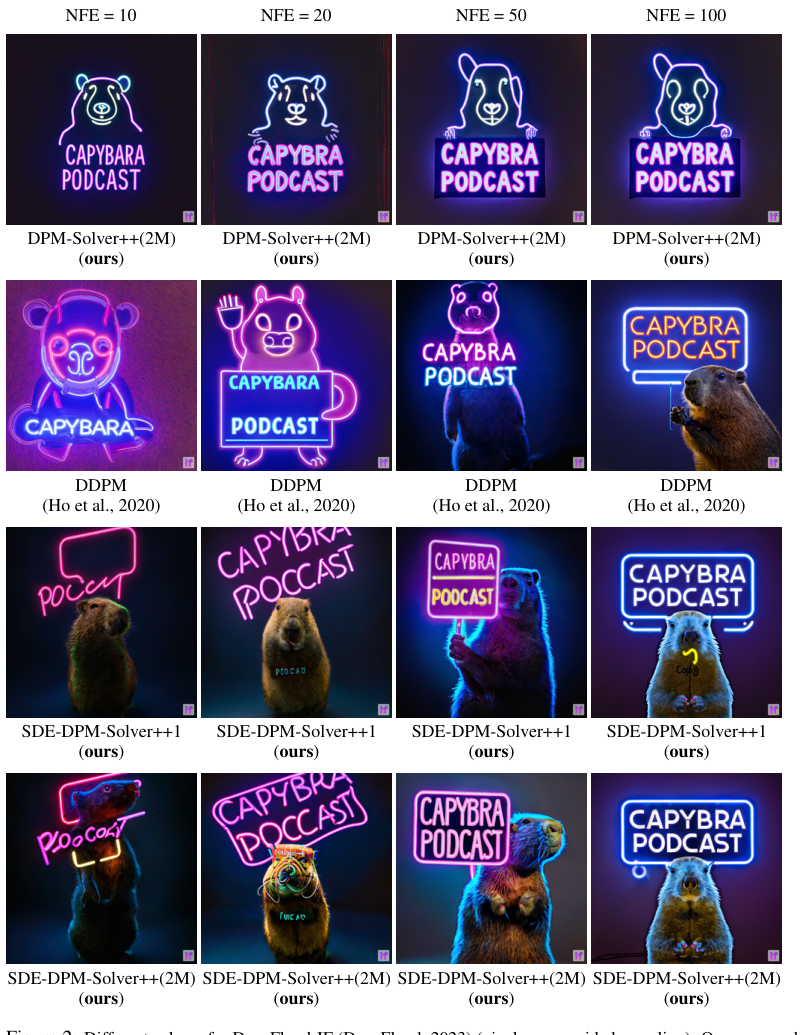
图源:DPM-Solver++,Figure 2。原论文图意:DeepFloyd-IF 的 pixel-space guided sampling 示例,展示 DPM-Solver++(2M) 随 NFE 增加的收敛,以及与 DDPM、SDE-DPM-Solver++ 的对比。

图源:DPM-Solver++,Figure 7。原论文图意:DeepFloyd-IF 的 pixel-space guided sampling 示例,比较 DPM-Solver++、DDPM、SDE-DPM-Solver++ 等不同 solver。
样例图不是单纯看哪张更好看,而是看同一个 prompt / guidance 条件下,少步 solver 是否保持主体结构、文字或物体边界。Figure 5/6 是对 ImageNet 与 Stable Diffusion 的定性补充;Figure 2/7 展示 DeepFloyd-IF 随 NFE 增加的视觉收敛。它们支撑“少步采样更稳”的直观证据,但真正比较仍要回到 Table 3/4 的 NFE、FID/MSE 和 guidance 设置。
工程上怎么用
如果把 DPM-Solver++ 接到扩散生成系统,建议先按下面这条问题链看:
1 | 症状:DDIM 100/250 步太慢,普通高阶 solver 在 CFG 大 scale 下出饱和、破碎或颜色异常 |
现代 diffusers / Stable Diffusion 生态里,常见经验是:
- guided sampling 优先用二阶 DPM-Solver++,不要盲目上三阶;
- pixel-space 有界图像可以考虑 dynamic thresholding;
- latent-space 通常不直接 threshold,因为 latent 不像像素那样有明确 边界;
- 低步数先比较
15/20/25NFE,不要只看10NFE; - prompt 评测要分桶:文字、细小结构、人脸、空间关系、风格化、强 CFG 都可能表现不同。
和世界模型高效训练主线的关系
DPM-Solver++ 不降低训练成本,它降低的是推理成本、评测成本和 rollout 成本。
对世界模型或视频扩散底座来说,solver 的意义在于:
- 离线批量生成伪数据或视频候选时,少 NFE 能显著降低生成成本;
- 交互式世界模拟器需要低延迟 rollout,采样步数是第一瓶颈之一;
- 评测同一个模型时,solver 变化会影响质量,不能把采样器当无关实现细节;
- 若后续做 DMD / consistency / rectified distillation,DPM-Solver++ 常可作为 teacher sampler 或 baseline。
但要注意:少步 solver 和少步蒸馏是两种成本转移方式。DPM-Solver++ 把收益放在推理侧,不增加训练;DMD/LCM 则把推理成本转移到离线训练学生。项目取舍应看:你是只想快速服务已有模型,还是愿意投入额外训练换更低步数。
局限与边界
第一,DPM-Solver++ 仍然依赖 pretrained denoiser 的质量。模型没学会的语义、结构和细节,solver 不能凭空补出来。
第二,它主要解决 guided sampling 的数值稳定和效率,不等于解决所有 CFG 问题。CFG scale 过高仍可能带来多样性下降、颜色过饱和、纹理硬化和 prompt overfitting。
第三,thresholding 对 pixel-space 图像直观有效,但 latent-space 没有同样清楚的像素边界,不能简单照搬。
第四,FID/MSE/样例图不能覆盖所有生成任务。产品里还要看 prompt 分桶、人审偏好、文字渲染、失败率和 tail latency。
本页结论
DPM-Solver++ 最值得记住的是:guided diffusion 的少步采样不能只追求高阶;大 guidance scale 会放大方向场和导数,使原本高阶的 solver 不稳。DPM-Solver++ 改用 的 exact solution、结合 thresholding 和 multistep 更新,在无需训练的前提下把 guided sampling 推到约 15 到 20 NFE。
参考
- DPM-Solver++: Fast Solver for Guided Sampling of Diffusion Probabilistic Models
- LuChengTHU/dpm-solver
- 回到论文总入口:论文专题讲解,用同一套 claim / 图表 / 边界口径横向比较。
- 把本篇结论接回主题:扩散模型。
- 按导航顺序继续:DMD:一步扩散蒸馏。
- Title: 论文专题讲解:DPM-Solver++:为 Guidance 场景设计的扩散 ODE 求解器
- Author: Charles
- Created at : 2025-09-26 09:00:00
- Updated at : 2025-09-26 09:00:00
- Link: https://charles2530.github.io/2025/09/26/ai-files-paper-deep-dives-diffusion-dpm-solver-plus-plus/
- License: This work is licensed under CC BY-NC-SA 4.0.