
论文专题讲解:Depth Anything V2:单目深度的数据配方
这页先按“论文证据节点”读:先问它解决哪一个瓶颈,再看核心图表、实验 setting 和不能外推的边界。背景概念先回 论文专题讲解 和 具身智能。
前置:不必先读完所有相关论文,但要知道本篇的输入、训练/推理路径和评测口径分别对应什么。
主线关系:读完后把结论回填到「具身智能」路线里,判断它改变的是机制、成本、数据配方、评测口径,还是仍停留在前沿假设。
- 论文:
Depth Anything V2 - 系统:
Depth Anything V2 / DA2 - 链接:arXiv:2406.09414
- 项目页:depth-anything-v2.github.io
- 代码与模型:DepthAnything/Depth-Anything-V2
- 关键词:monocular depth、DINOv2、DPT、synthetic data、pseudo label、teacher-student、metric depth、DA-2K
Depth Anything V2 放在具身智能专题里,不是因为它直接输出机器人动作,而是因为它补了机器人闭环里最基础的视觉状态:从普通 RGB 图像得到更细、更稳、更开放域的深度先验。抓取、导航、避障、重建、VLA 状态编码和仿真数据质检,都需要这层几何信号。
DA2 的核心贡献很朴素:它几乎没有靠新奇结构取胜,而是把单目深度训练的数据链路重新排了一遍:
1 | precise synthetic labels |
这条路线解释了为什么 DA2 能同时接近 diffusion depth model 的细节、保持 discriminative depth model 的效率,并比 DA1 更能处理透明、反光、复杂布局和薄结构。
它的效率贡献是什么
| 维度 | 贡献 |
|---|---|
| 节省的成本 | 不是依赖大规模人工深度标注,而是用 595K 高质量合成深度训练 teacher,再把 62M 真实无标注图像转成 pseudo labels;学生模型从 24.8M 到 335.3M 可部署 |
| 核心机制 | synthetic teacher、label-level distillation、pseudo-labeled real images、DINOv2 + DPT、scale-shift-invariant / gradient matching loss |
| 对具身主线的意义 | 给 VLA、几何规划、资产重建和数据质检提供单目深度底座;也是 Depth Anything 3 继续扩展到任意视角几何的重要前置 |
| 主要风险 | 基础模型输出仍是 affine-invariant inverse depth,不天然拥有绝对尺度;metric depth 需要额外 fine-tune;单目估深度不能替代标定、RGB-D、力控和安全层 |
| 应接到本站哪里 | Depth Anything、相机、深度与机器人视觉、资产到轨迹:感知、抓取与数据管线、Depth Anything 3 |
论文位置
DA2 回答的是一个很具体的问题:单目深度模型到底是因为 discriminative architecture 不够强才缺细节,还是因为训练标签本身太粗、太噪?
论文的判断是后者。DA1、MiDaS、Metric3D 这类 discriminative depth 模型通常很快、泛化好,但在透明物体、反光表面、薄结构和边界细节上容易糊。Marigold、Geowizard 这类基于 Stable Diffusion 的 depth model 细节更强,但推理重、速度慢,也不一定在复杂真实场景里更稳。
DA2 的目标是把这两边的优点合起来:
- 保留 DINOv2 + DPT 这类 discriminative model 的效率和开放域泛化;
- 用高精度 synthetic depth 把薄结构、边界、透明和反光监督补上;
- 用大规模真实无标注图像把 synthetic-to-real 的 domain gap 补上;
- 用 teacher-student 方式把 1.3B teacher 的能力迁移到小模型。
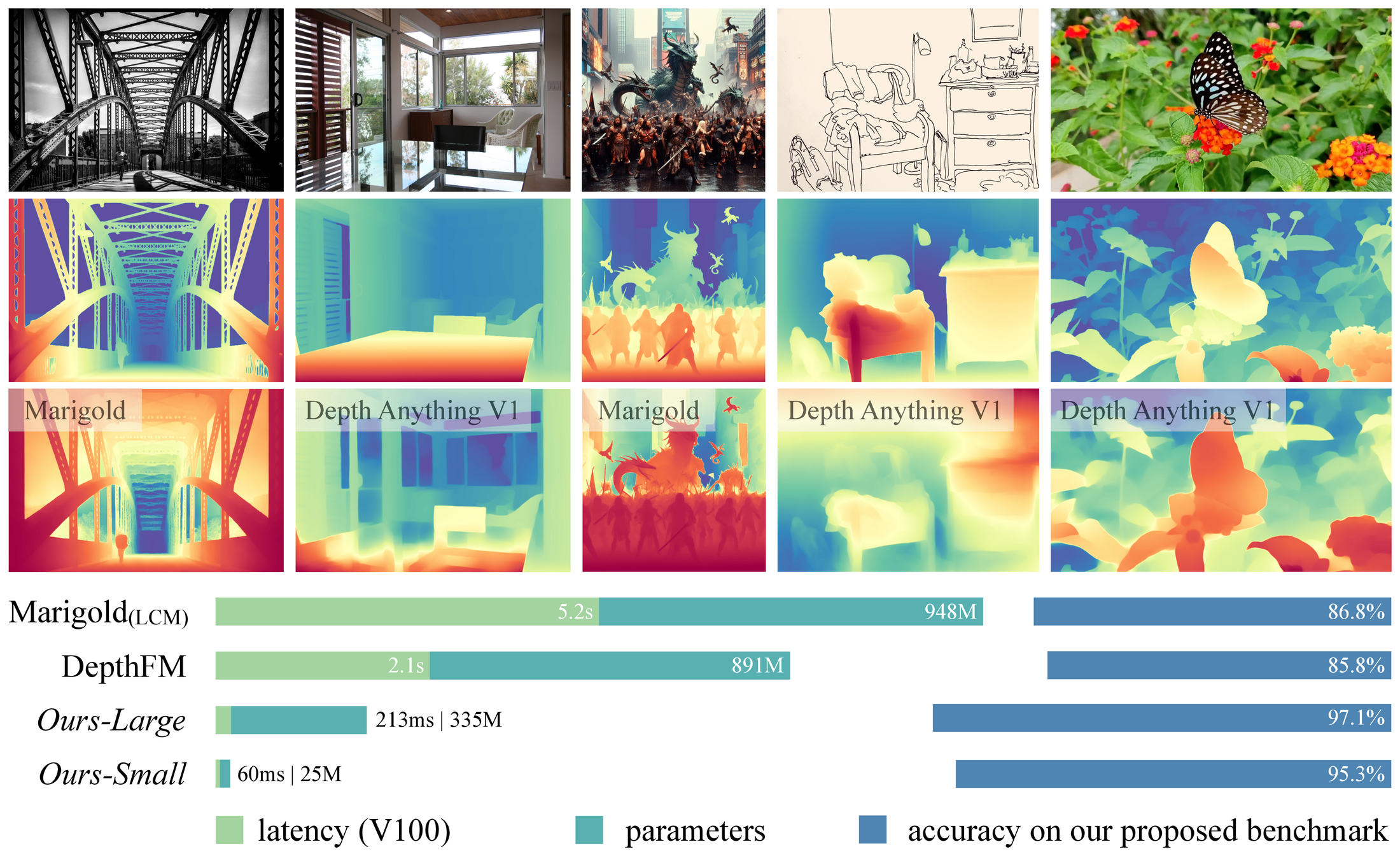
图源:Depth Anything V2,Figure 1。原论文图意:DA2 相比 DA1 有更细的结构和更强鲁棒性;相比 SD-based depth model,在效率、参数量和精度上更适合实际使用。
输入输出:输入是真实/合成图像、伪标签和深度监督,输出是更稳的单目深度模型。
效率机制:通过数据配方和伪标签质量控制改善深度泛化。
对主线意义:它帮助世界模型获得更稳几何观测,但不负责动作后果。
不能证明什么:深度 benchmark 不能替代机器人闭环和接触失败回放。
为什么真实深度标签反而会伤模型
这篇论文最值得记住的第一点,是它把“真实标注数据更多一定更好”这个直觉拆掉了。
真实深度标签常来自 RGB-D sensor、stereo matching、SfM / COLMAP、LiDAR 或其他重建管线。这些数据当然有价值,但它们在单目深度基础模型训练里有几个明显问题:
| Source of real depth | Typical noise |
|---|---|
| Depth sensor | transparent / reflective surfaces are missing or wrong |
| Stereo matching | low-texture or repetitive patterns are unstable |
| SfM / COLMAP | dynamic objects and outliers can break geometry |
| Dataset post-processing | ignored masks and sparse maps remove fine structures |
对机器人来说,这些问题不是学术细枝末节。玻璃杯、镜面、电器屏幕、细杆、网格、透明包装、桌面边缘,恰恰是抓取、避障和放置里最容易出错的区域。如果训练标签在这些区域本来就是空洞或错误的,模型学到的就会是“看起来合理但几何上不可靠”的深度。
DA2 的关键观察是:合成图像的视觉分布不如真实图像自然,但它的深度标签可以是真正完整、干净、边界精确的。
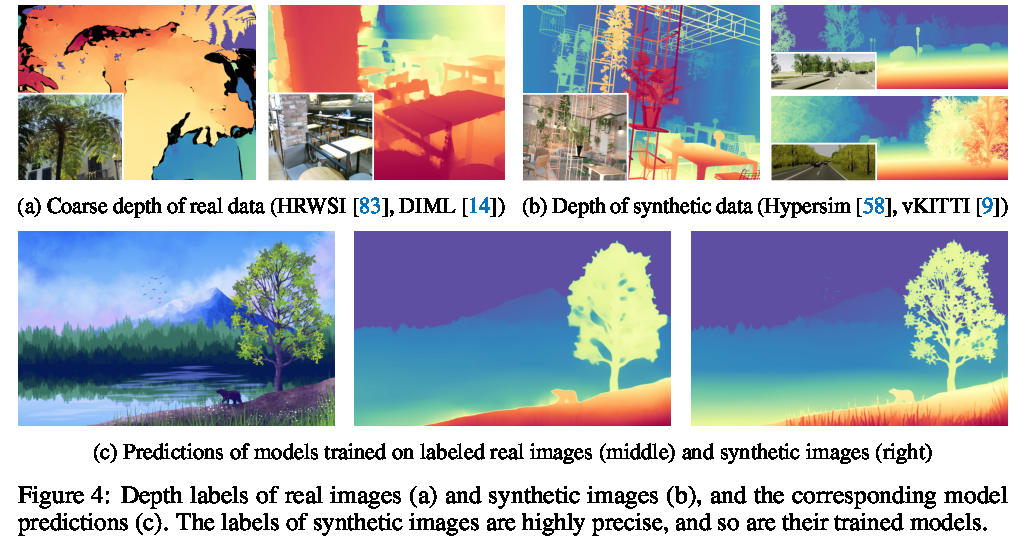
图源:Depth Anything V2,Figure 4。原论文图意:真实深度标签经常粗糙或缺失细节,而 synthetic depth 能保留薄结构、边界和透明/反光物体的真实几何;用 synthetic labels 训练出的模型也更容易保住细粒度预测。
这不是说 synthetic data 单独就够。论文紧接着指出 synthetic data 有两个硬伤:分布偏移和场景覆盖不足。图像风格太干净、布局太规整、类别太有限,导致小模型直接从 synthetic transfer 到真实图像时会崩。

图源:Depth Anything V2,Figure 5。原论文图意:只在 synthetic images 上训练后,只有 DINOv2-G 能较好迁移到真实图像;较小模型和其他 encoder 容易出现明显泛化问题。
即使用 DINOv2-G 这个最大 teacher,只靠 synthetic 训练也不稳。论文展示了 sky 和 human head 的失败案例:teacher 在 synthetic training set 覆盖不到的真实模式上仍会犯错。

图源:Depth Anything V2,Figure 6。原论文图意:只用 synthetic images 训练的 DINOv2-G teacher 仍可能在真实天空、人像等分布覆盖不足的区域失败。
所以 DA2 的方案不是“synthetic 替代 real”,而是更精细的三段式分工:
- synthetic labels 用来训练最强 teacher,保证几何监督干净;
- unlabeled real images 用来覆盖真实视觉分布;
- teacher 给真实图像打 pseudo labels,学生只学习这批更真实、更细的 pseudo-labeled real images。
训练总路线
DA2 的 Figure 7 可以看成整篇论文的工程路线图。
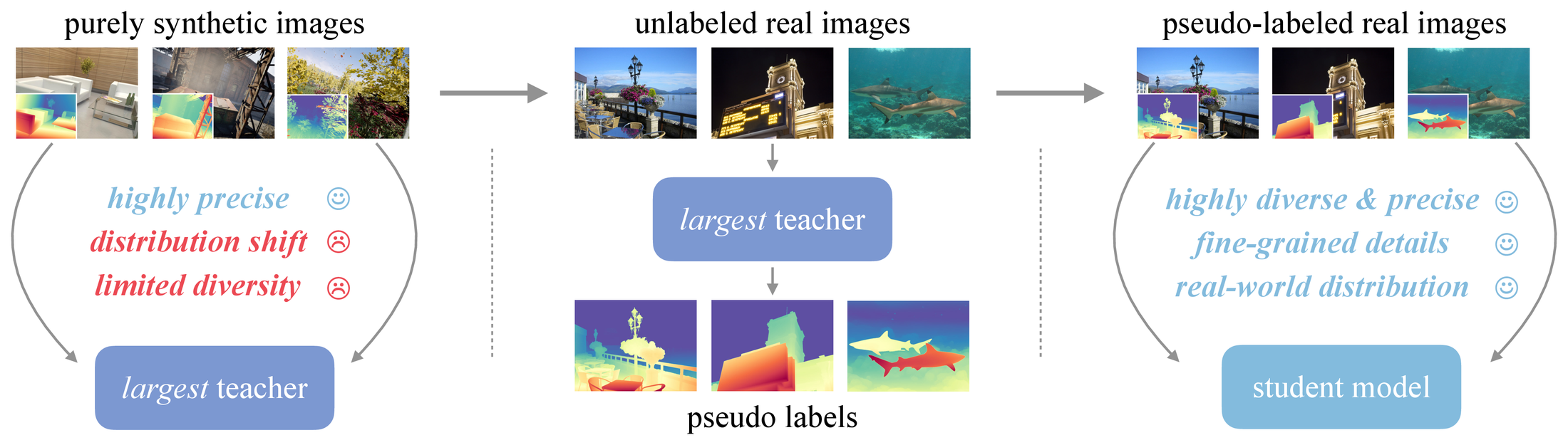
图源:Depth Anything V2,Figure 7。原论文图意:先用 precise synthetic images 训练最大 teacher,再用 teacher 给 unlabeled real images 生成 pseudo labels,最后用 pseudo-labeled real images 训练 student models。
左侧 synthetic images 的优点是 highly precise,缺点是 distribution shift 和 limited diversity。中间 unlabeled real images 的作用是引入真实世界分布。右侧 pseudo-labeled real images 同时拥有真实图像分布和 teacher 生成的细粒度深度标签,所以更适合作为学生模型的最终训练数据。
关键点是学生阶段不是把 synthetic 和 pseudo-real 简单混起来。论文的 ablation 显示,对 ViT-S / ViT-B 这类小模型,只用 pseudo-labeled real images 反而略好。这说明 teacher 已经把 synthetic 的干净几何知识转译到了真实图像上,学生再直接学习真实分布更有效。
训练数据
Table 7 is redrawn below with the original English fields.
| Dataset | Indoor | Outdoor | # Images |
|---|---|---|---|
| Precise Synthetic Images (595K) | |||
| BlendedMVS | ✓ | ✓ | 115K |
| Hypersim | ✓ | 60K | |
| IRS | ✓ | 103K | |
| TartanAir | ✓ | ✓ | 306K |
| VKITTI 2 | ✓ | 20K | |
| Pseudo-labeled Real Images (62M) | |||
| BDD100K | ✓ | 8.2M | |
| Google Landmarks | ✓ | 4.1M | |
| ImageNet-21K | ✓ | ✓ | 13.1M |
| LSUN | ✓ | 9.8M | |
| Objects365 | ✓ | ✓ | 1.7M |
| Open Images V7 | ✓ | ✓ | 7.8M |
| Places365 | ✓ | ✓ | 6.5M |
| SA-1B | ✓ | ✓ | 11.1M |
表源:Depth Anything V2,Table 7。原论文表格要点:teacher 阶段使用 5 个高精度 synthetic datasets;student 阶段使用 8 个真实无标注图像源,经 teacher 生成 pseudo depth 后训练。
这里有两个很有工程味的选择。
第一,DA2 不对数据集做复杂重平衡,而是直接 concatenate training datasets。这个选择看起来粗糙,但它强调了作者真正依赖的是“标签质量 + 总体覆盖 + DINOv2 预训练先验”,不是复杂 sampling policy。
第二,论文在 appendix 里专门分析了 unlabeled data 的必要性。只用单一 SA-1B 训练更多轮,不能替代多来源 62M 图像。原因很直接:单一数据源的循环次数不能补足场景多样性。对具身系统也一样,重复采很多相似桌面轨迹,不能替代厨房、仓库、户外、透明物体、拥挤遮挡和失败恢复的覆盖。
模型结构:没有花活,但分工清楚
DA2 结构上延续 Depth Anything V1:DINOv2 encoder + DPT depth decoder。
| Component | DA2 choice | Why it matters |
|---|---|---|
| Encoder | DINOv2 ViT-S / B / L / G | 继承大规模视觉预训练的开放域语义和几何先验 |
| Decoder | DPT | 把 ViT 多尺度特征重组为 dense depth map |
| Output | affine-invariant inverse depth | 更适合跨数据集相对深度训练,但不直接给绝对尺度 |
| Model scales | 24.8M, 97.5M, 335.3M, 1.3B | 从部署小模型到最大 teacher 覆盖不同成本区间 |
官方仓库发布的相对深度模型包括:
| Model | Params | Role |
|---|---|---|
| Depth-Anything-V2-Small | 24.8M | 实时、移动端或轻量感知候选 |
| Depth-Anything-V2-Base | 97.5M | 质量和成本折中 |
| Depth-Anything-V2-Large | 335.3M | 常用高质量推理基线 |
| Depth-Anything-V2-Giant | 1.3B | 论文 teacher / 最强模型尺度 |
对机器人应用要特别小心 affine-invariant inverse depth 这句话。基础 DA2 更擅长相对深度:哪个更近、边界在哪里、结构如何连续。它不保证“这个点离相机 0.37 米”。如果任务需要绝对距离,仍要接 metric depth fine-tuning、相机标定、多视角几何或真实 depth sensor。
损失函数和训练细节
DA2 的训练细节非常值得看,因为它的收益主要来自数据和目标函数配合,而不是换了一个大模型名。
1. Teacher stage
teacher 使用 DINOv2-G,纯 synthetic data 训练:
| Setting | Value |
|---|---|
| Backbone | DINOv2-G |
| Decoder | DPT |
| Training data | 595K precise synthetic labeled images |
| Input resolution | 518 x 518 after resizing shorter side to 518 and random crop |
| Batch size | 64 |
| Iterations | 160K |
| Optimizer | Adam |
| Encoder learning rate | 5e-6 |
| Decoder learning rate | 5e-5 |
| Dataset sampling | concatenate datasets, no balancing |
teacher 阶段的目标是“宁可视觉分布不完整,也要深度标签干净”。它用 synthetic depth 教会模型细边界、薄结构、透明和反光这些真实标签经常坏掉的区域。
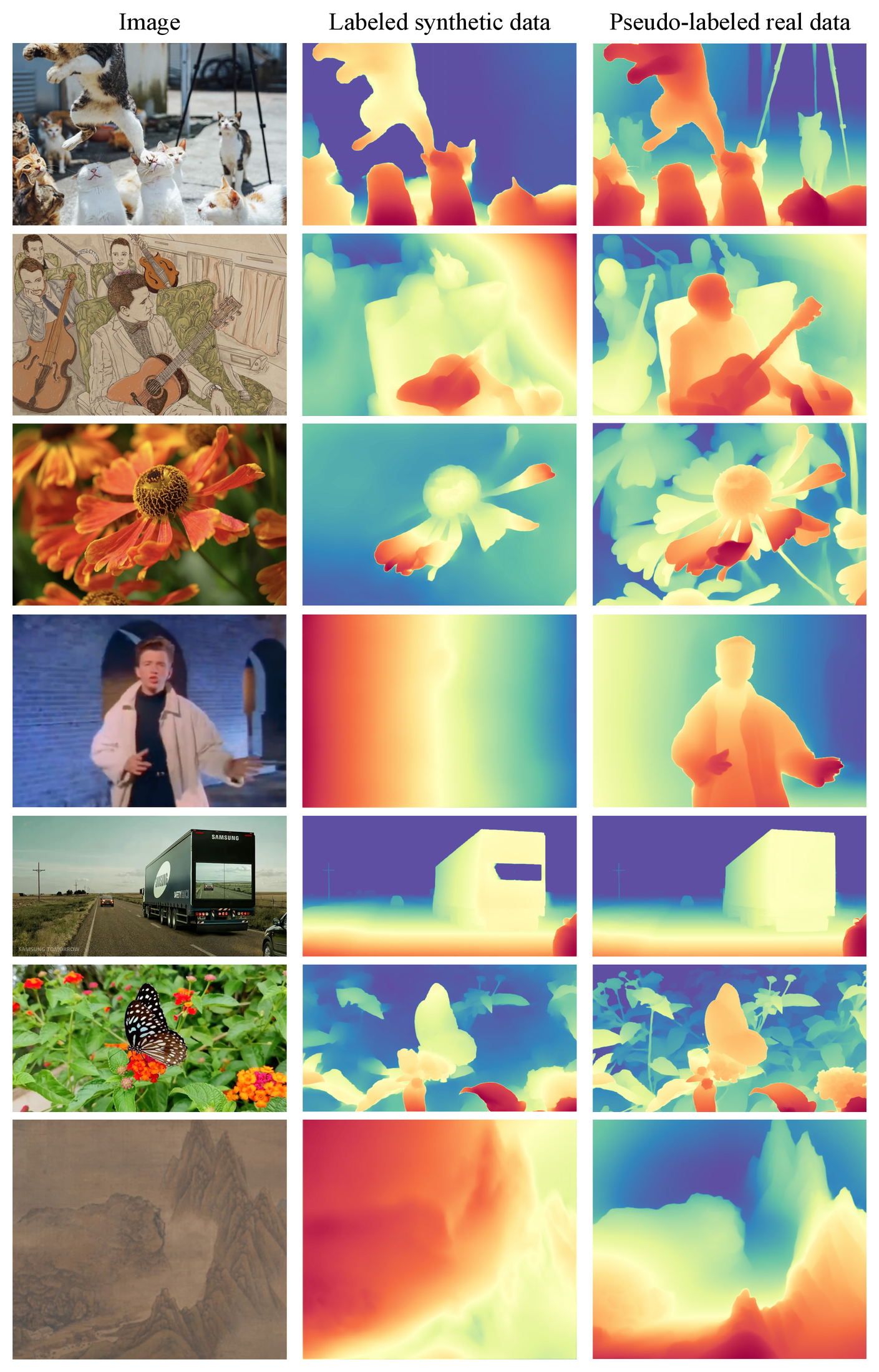
2. Pseudo-labeling stage
teacher 给 62M 真实无标注图像生成 pseudo depth。这个阶段不是普通 feature distillation,而是 label-level distillation:学生看到的是真实图像和 teacher 生成的 dense depth label。
论文强调这种做法比直接做 feature-level / logit-level distillation 更稳,尤其当 teacher 和 student 尺度差距很大时。直观上,学生不必模仿 teacher 的内部表征,只要学习 teacher 在真实图像上输出的深度结构。
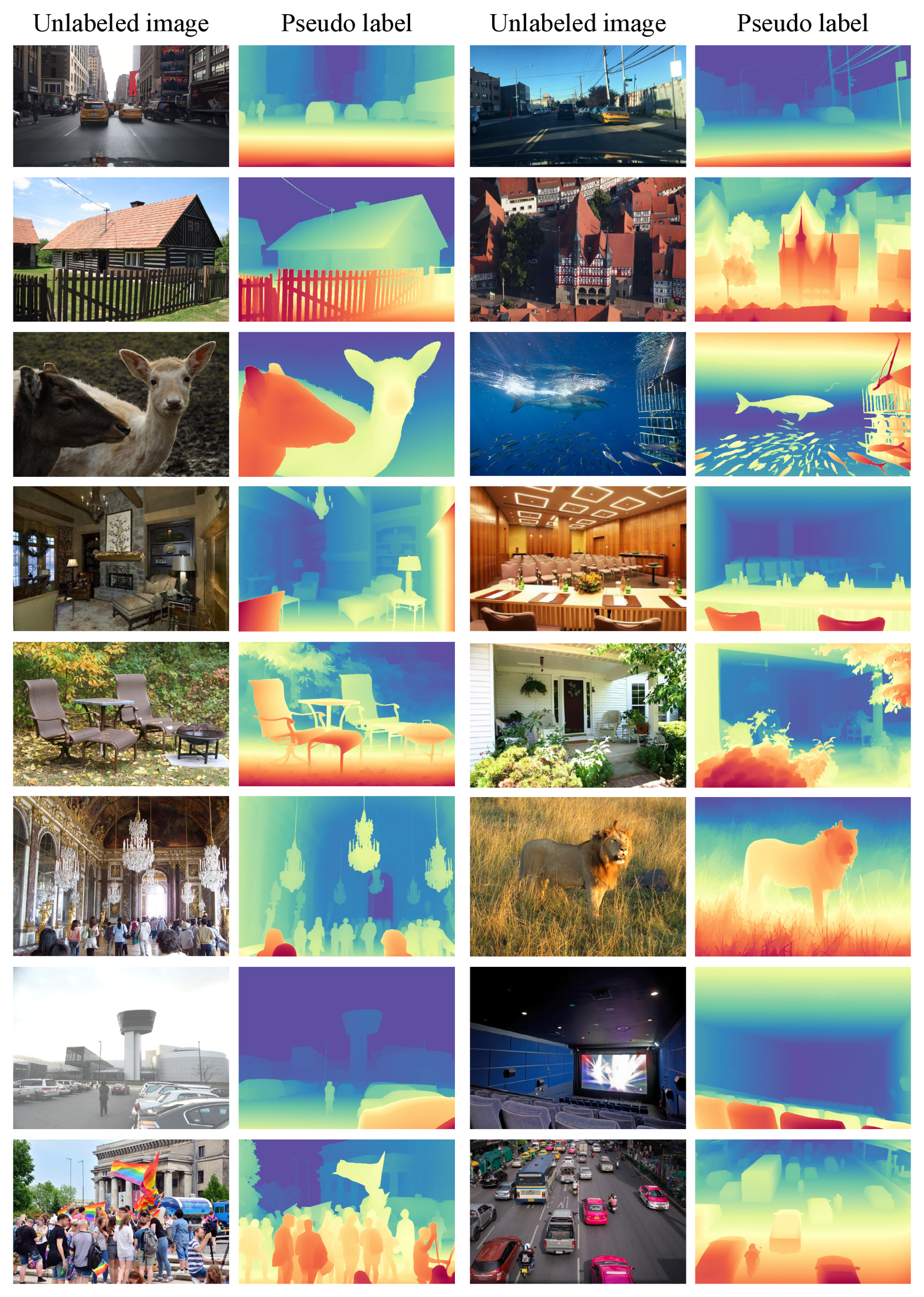
图源:Depth Anything V2,Figure 17。原论文图意:teacher 在 BDD100K、Google Landmarks、ImageNet-21K、LSUN、Objects365、Open Images V7、Places365 和 SA-1B 等不同真实图像源上生成 pseudo depth labels。
3. Student stage
student 在 pseudo-labeled real images 上训练:
| Setting | Value |
|---|---|
| Student backbones | DINOv2 ViT-S / ViT-B / ViT-L / ViT-G |
| Training data | pseudo-labeled real images |
| Input resolution | 518 x 518 |
| Batch size | 192 |
| Iterations | 480K |
| Optimizer | Adam |
| Encoder learning rate | 5e-6 |
| Decoder learning rate | 5e-5 |
| Dataset sampling | concatenate datasets, no balancing |
| Pseudo-label filtering | ignore top-10% largest-loss regions per pseudo-labeled sample |
忽略每个 pseudo-labeled sample 中 top-10% largest-loss regions 是一个很实用的降噪技巧。teacher 再强也会在某些区域犯错;把这些区域从训练损失里排掉,可以避免学生被 pseudo-label 的局部错误拖偏。
4. Loss design
在 labeled synthetic images 上,DA2 使用两个 MiDaS 系目标:
| Loss | Role |
|---|---|
L_ssi |
scale- and shift-invariant loss,约束相对深度结构 |
L_gm |
gradient matching loss,强调边界、薄结构和局部几何变化 |
论文设置 L_ssi : L_gm = 1 : 2。这个比例很关键,因为 DA2 发现 gradient matching loss 只有在 synthetic labels 足够完整、足够细时才真正有用。如果真实 depth map 本身粗糙、稀疏或有 ignored holes,梯度损失只是在强化噪声和缺失。
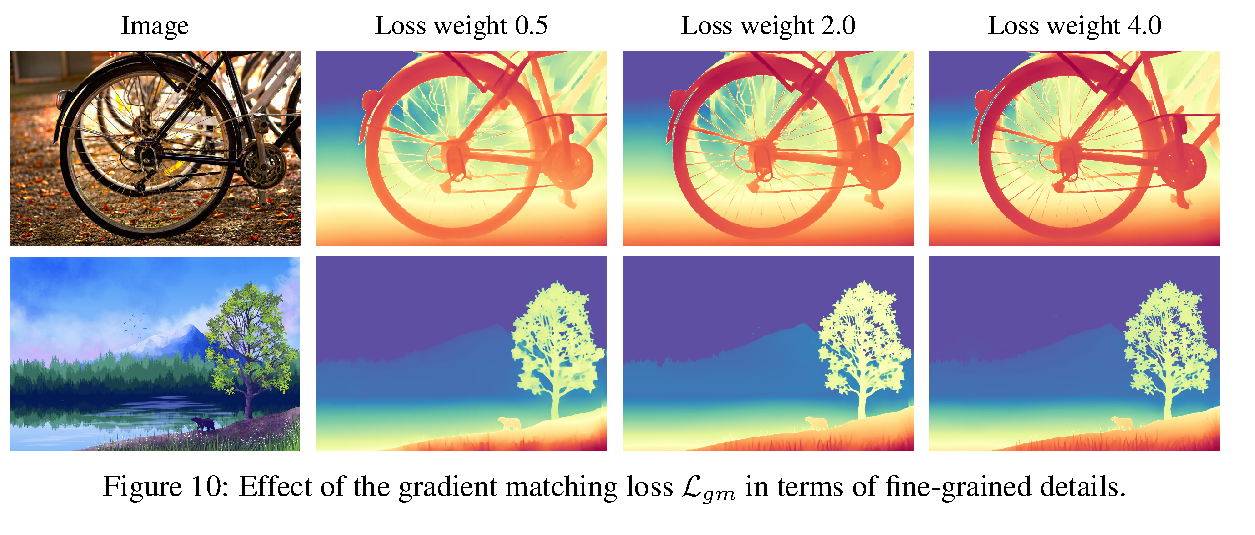
图源:Depth Anything V2,Figure 10。原论文图意:在 synthetic labels 上提高 gradient matching loss 权重,会让细结构和边界更清晰;论文最终取权重 2.0 作为精度和锐度折中。
在 pseudo-labeled real images 上,论文还沿用 DA1 的 feature alignment loss,用来保留 DINOv2 encoder 里的语义信息。这个设计对具身场景有意义:深度图不只是几何连续面,还要和物体、场景、语义边界对齐,否则 VLA 或 planner 消费时会出现“深度边界和对象边界错位”的问题。
为什么学生只吃 pseudo-real 反而更好
DA2 的 ablation 很有意思。直觉上,学生训练似乎应该混合 synthetic labeled data 和 pseudo-labeled real data。但论文发现,对 ViT-S 和 ViT-B,去掉 synthetic、只用 pseudo-labeled real images 还略好。
可以把原因理解成两层。
第一,synthetic 的价值已经被 teacher 吸收了。teacher 通过 synthetic labels 学到精细深度,再把这些知识翻译到真实图像上。学生直接学 pseudo-real,等于在真实视觉分布里学习 synthetic 几何知识。
第二,小模型容量有限。让它同时适配 synthetic style 和 real style,可能会浪费容量;只训练在真实图像分布上,反而更符合最终推理环境。
图源:Depth Anything V2,Figure 16。原论文图意:ViT-S 只用 synthetic labels 时真实场景泛化不足;加入 pseudo-labeled real images 后,复杂真实图像上的鲁棒性明显提升。
评测:为什么 DA-2K 很重要
DA2 没有只盯传统 NYU-D、KITTI、Sintel、ETH3D、DIODE 这些 benchmark。论文认为这些测试集也存在 label noise、场景单一和分辨率偏低的问题,很难反映模型对透明、反光、薄结构、非真实图像、航拍、水下等开放场景的能力。
因此作者构建了 DA-2K:1K images、2K relative depth pairs,覆盖 8 类场景。标注方式是稀疏成对比较:给一张图的两个点,判断哪个更近。候选点来自 SAM mask,分歧较大的模型预测会被拿出来给人工标注,标注还会交叉检查。
Table 3 is redrawn below with the original English fields.
| Method | Marigold | Geowizard | DepthFM | Depth Anything V1 | ViT-S | ViT-B | ViT-L | ViT-G |
|---|---|---|---|---|---|---|---|---|
| Accuracy (%) | 86.8 | 88.1 | 85.8 | 88.5 | 95.3 | 97.0 | 97.1 | 97.4 |
表源:Depth Anything V2,Table 3。原论文表格要点:在 DA-2K 上,即使最小的 DA2 ViT-S 也超过 Marigold、Geowizard、DepthFM 和 DA1;ViT-G 达到 97.4% relative depth accuracy。
这张表的结论不是“所有传统 benchmark 都没用”,而是:当模型已经很强时,旧 benchmark 的噪声和覆盖不足会掩盖真正差异。对具身系统尤其如此,真实部署更关心透明/反光/薄结构/极端场景,而不是只在固定 indoor 或 street 数据集上刷分。
Metric depth:能做,但要单独 fine-tune
DA2 基础模型输出的是 affine-invariant inverse depth,所以它天然更像相对深度 foundation model。为了服务实际应用,论文又把 encoder 转到 metric depth estimation。
有两条路线:
- 按 DA1 / ZoeDepth pipeline,把 DA2 encoder 放进 metric depth model,在 NYU-D、KITTI 等 in-domain data 上训练;
- 为了服务 multi-view synthesis 等真实应用,在 Hypersim 和 Virtual KITTI synthetic datasets 上 fine-tune indoor / outdoor metric depth models。
这对机器人很关键。抓取和避障通常需要绝对尺度;如果只用 DA2 相对深度,系统知道“杯子比桌面近”,但不知道“夹爪还差 3cm 还是 12cm”。要进入控制闭环,就必须把 DA2 和相机内参、标定、多视角、RGB-D 或 metric fine-tuning 接起来。
和 DA1、DA3 的关系
Depth Anything 系列可以这样串起来:
| Version | What it mainly solves | What it does not solve |
|---|---|---|
| Depth Anything / DA1 | 大规模 unlabeled data + auxiliary supervision 带来的开放域单目深度泛化 | 细结构、透明/反光和某些复杂几何仍不够稳 |
| Depth Anything V2 / DA2 | synthetic teacher + pseudo-labeled real images,让单目深度更细、更稳、更高效 | 仍主要是单图相对深度,不直接解决多视角 pose 和 3D 融合 |
| Depth Anything 3 / DA3 | 把 DA/DA2 的单目深度扩展到任意视角 geometry,输出 depth、ray、camera 和可融合 3D 表示 | 不直接解决机器人动作、接触动力学和控制安全 |
所以 DA2 是 DA3 的重要前置,但二者解决层级不同。DA2 把“单张图的深度估计”做得更稳;DA3 才进一步把多视角相机几何、ray map、点云融合和 3DGS 接口纳入系统。
对具身智能的启发
DA2 给具身智能的启发,主要不是“拿来就能控制机器人”,而是四条更底层的工程经验。
第一,深度数据的标签质量比数量更关键。真实数据如果标签粗、噪、缺洞,多喂只会把错误模式教给模型。对机器人轨迹也类似:大量干净成功 demo 不一定能教会失败恢复,低质量自动标注可能会系统性污染 policy。
第二,synthetic 和 real 应该分工,而不是互相替代。synthetic 适合提供精确几何和可控长尾;real 适合提供真实分布和场景多样性。DA2 用 teacher 把 synthetic precision 转译到 real distribution,这个思路很适合机器人数据引擎。
第三,teacher-student 不一定要蒸馏内部特征。在 teacher 和 student 差距很大时,label-level distillation 可能更稳。具身数据里也可以借鉴:用强模型或仿真器给真实轨迹补标签,再让轻量策略在真实分布上学习。
第四,评测要覆盖任务真正怕的区域。如果 benchmark 不含透明、反光、薄结构、极端视角和高分辨率场景,那么分数可能无法预测真实部署风险。对 VLA 来说也是一样,不能只测短技能成功率,还要测无效指令、遮挡、失败恢复和长尾物体。
局限与风险
DA2 的边界也要说清楚。
- 相对深度不是绝对测量:基础 DA2 输出 affine-invariant inverse depth,不能直接当成机器人控制里的厘米级距离。
- 单目估计仍受先验影响:新相机、新尺度物体、新材料、新安装位置都可能带来偏差。
- pseudo labels 仍可能有系统性错误:top-10% loss filtering 能缓解局部噪声,但不能证明所有 long-tail 都被修正。
- 训练成本不低:62M unlabeled real images 和 480K student iterations 本身就是相当重的数据与计算工程。
- 不解决多视角一致性:点云融合、相机位姿、3D reconstruction 需要 DA3、VGGT、SLAM 或传统几何管线继续补。
- 不等于具身策略:它提供视觉几何状态,不负责任务规划、动作生成、接触控制和安全恢复。
阅读结论
DA2 最值得记住的一句话是:单目深度 foundation model 的进步,不只来自更大模型,也来自把“干净几何监督”和“真实世界分布”拆成 teacher-student 数据路线。
这对具身智能很有用。机器人系统最怕的不是模型不会在 benchmark 上报高分,而是感知状态在真实边界条件下不可信。DA2 提供的经验是:先用 synthetic 获取可控、精确、完整的几何标签,再用真实无标注数据扩展分布,最后把能力蒸馏进可部署模型。这个模式会反复出现在后续 VLA、世界模型、仿真数据引擎和几何底座里。
参考链接
- 回到论文总入口:论文专题讲解,用同一套 claim / 图表 / 边界口径横向比较。
- 把本篇结论接回主题:具身智能。
- 按导航顺序继续:VGGT:feed-forward 3D 几何。
- Title: 论文专题讲解:Depth Anything V2:单目深度的数据配方
- Author: Charles
- Created at : 2025-10-04 09:00:00
- Updated at : 2025-10-04 09:00:00
- Link: https://charles2530.github.io/2025/10/04/ai-files-paper-deep-dives-embodied-ai-depth-anything-v2/
- License: This work is licensed under CC BY-NC-SA 4.0.