
论文专题讲解:ZeRO:大模型训练的零冗余状态优化
这页先按“论文证据节点”读:先问它解决哪一个瓶颈,再看核心图表、实验 setting 和不能外推的边界。背景概念先回 论文专题讲解 和 训练与基础系统。
前置:不必先读完所有相关论文,但要知道本篇的输入、训练/推理路径和评测口径分别对应什么。
主线关系:读完后把结论回填到「训练与基础系统」路线里,判断它改变的是机制、成本、数据配方、评测口径,还是仍停留在前沿假设。
- 论文:
ZeRO: Memory Optimizations Toward Training Trillion Parameter Models - 链接:arXiv:1910.02054
- 作者:Samyam Rajbhandari、Jeff Rasley、Olatunji Ruwase、Yuxiong He
- 代码:microsoft/DeepSpeed
- 日期:2019-10;arXiv v3 修订于 2020-05-13
- 关键词:ZeRO、DeepSpeed、data parallelism、optimizer state partitioning、gradient partitioning、parameter partitioning、activation partitioning、memory defragmentation、mixed precision Adam
Megatron-LM 解决的是“Transformer 的大 GEMM 怎么切到多张 GPU 上”。ZeRO 解决的是另一个更底层的问题:数据并行明明最容易用,为什么一上大模型就把每张卡的显存浪费在重复存 optimizer states、gradients 和 parameters 上?
ZeRO 的核心想法很漂亮:保持数据并行的使用方式和计算粒度,但把模型状态从“每张卡完整复制一份”改成“在 data-parallel ranks 间分片存储,训练时按需 gather / reduce”。这样就能在不要求用户重写模型的前提下,把可训练模型规模从十亿级推到百亿、千亿甚至理论上的万亿参数。
它的效率贡献是什么
| 维度 | 贡献 |
|---|---|
| 节省的成本 | 消除 data parallel training 中 optimizer states、gradients、parameters 的冗余复制,并优化 activations、temporary buffers、memory fragmentation |
| 核心机制 | ZeRO-DP 三阶段分片:P_os partition optimizer states,P_os+g 再 partition gradients,P_os+g+p 再 partition parameters;ZeRO-R 处理 activation partition、constant-size buffers 和 defragmentation |
| 对训练系统主线的意义 | 把“大模型训练显存账”从模型切分问题扩展成状态生命周期问题,成为 DeepSpeed ZeRO、FSDP、optimizer/gradient/parameter sharding 的基础范式 |
| 主要风险 | 论文的 ZeRO-100B 实现主要覆盖 P_os+g 加 ZeRO-R,并未完整评估后来的 ZeRO-3 生态;实验基于 V100/DGX-2 与 GPT-2-like dense models |
| 应接到本站哪里 | Megatron-LM / DeepSpeed 与训练栈、分布式训练与 Checkpointing、低比特训练与数值格式 |
证据等级与外推边界
ZeRO 的证据分两层:前半部分是内存和通信量的理论分析,后半部分是 ZeRO-100B 在 400 张 V100 上的系统实验。它证明的是“状态分片能大幅降低 DP 的显存冗余,并保留较高训练吞吐”,不是证明“万亿参数训练在当时已经经济可行”。
| 论文结论 | 证据来源 | 证据等级 | 可外推到高效训练 | 不能直接外推 |
|---|---|---|---|---|
| mixed precision Adam 的模型状态显存远大于 fp16 参数本身 | Section 3 memory accounting、Figure 1 | Analytical accounting | 训练系统要拆开 parameters、gradients、optimizer states、activations、buffers 和 fragmentation | 不包含现代 FP8/FP4 optimizer、8-bit optimizer 或 CPU/NVMe offload 的完整成本 |
| ZeRO-DP 三阶段能线性降低冗余状态 | Figure 1、Table 1、Table 2 | Analytical + measured capacity | ZeRO/FSDP 类方法本质是在 DP 组内分片模型状态,并在生命周期需要时重建 | 不能只看理论显存,还要看 gather/reduce 通信和 overlap |
| ZeRO-100B 能把 100B 级 dense GPT-like 模型跑到高吞吐 | Figure 2、Figure 3、Table 5、Table 6 | System throughput | 大模型训练的吞吐提升可以来自“更省显存 -> 更大 local batch -> 更高 arithmetic intensity” | 不能代表所有模型、网络拓扑和 batch regime 都会 super-linear scaling |
| ZeRO-R 解决 residual states 后,显存瓶颈继续后移 | Figure 6、Figure 7、Figure 8、Table 3 | Ablation / system analysis | activation partition、buffer sizing 和 defragmentation 应该和状态分片一起考虑 | CPU activation offload 只有在模型很大或 batch 很小时才可能值得 |
| Turing-NLG 证明 ZeRO 能支撑真实大模型训练 | Figure 5、Section 10.6 | End-to-end model result | 系统论文也要接到真实训练 loss / perplexity,而不是只报告 memory | 数据、tokenizer、模型细节和完整训练配方没有像模型报告那样展开 |
显存账:为什么 1.5B GPT-2 参数只有 3GB 却训不动
论文从一个非常适合教学的问题开始:1.5B 参数如果用 fp16 存参数,只有大约 3GB;为什么 TensorFlow / PyTorch 在 32GB GPU 上还是训不动?
答案是训练时不只存参数。以 mixed precision Adam 为例,模型有 个参数时:
| State | Precision | Memory |
|---|---|---|
| parameters used in forward/backward | fp16 | bytes |
| gradients | fp16 | bytes |
| fp32 master parameters | fp32 | bytes |
| Adam momentum | fp32 | bytes |
| Adam variance | fp32 | bytes |
| total model states | mixed precision Adam | bytes |
所以 1.5B 参数不只是 3GB,而是至少 的 model states。还没算 activation、temporary buffers、fragmentation 和通信 buffer。这就是 ZeRO 论文最重要的训练视角:显存不是一个总数,而是一组生命周期不同的状态。
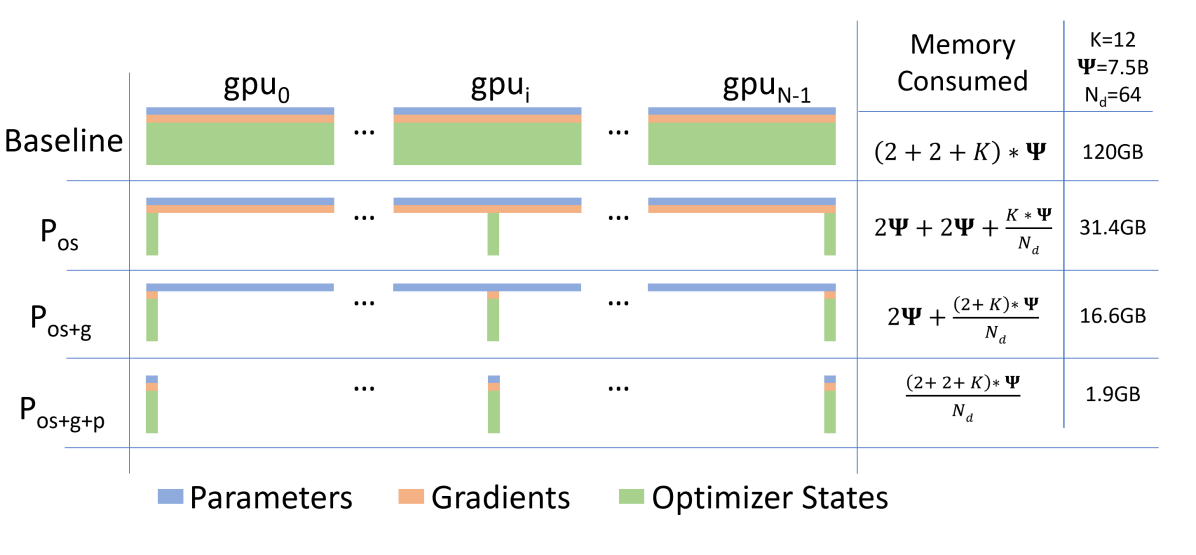
图源:ZeRO Figure 1。原图比较 data parallel model states 的 per-device memory,并展示 ZeRO-DP 三阶段如何逐步分片 optimizer states、gradients 和 parameters。图中示例使用 、、mixed precision Adam 。
ZeRO-DP 三阶段
ZeRO-DP 的三阶段不是互斥选项,而是累积打开:
| Stage | Partitioned state | Per-device model-state memory | Communication volume |
|---|---|---|---|
| baseline DP | none | baseline all-reduce, about data movement per step | |
P_os |
optimizer states | same communication volume as DP | |
P_os+g |
optimizer states + gradients | same communication volume as DP, using reduce-scatter + all-gather | |
P_os+g+p |
optimizer states + gradients + parameters | about 1.5x baseline DP communication volume |
这里 是 data parallel degree, 是 mixed precision Adam optimizer states 的内存系数。三个阶段的直觉可以这样记:
P_os:每个 rank 只负责更新一部分 optimizer states,省掉 Adam master weights / momentum / variance 的重复存储;P_os+g:梯度也按负责的参数 shard reduce-scatter,不再每张卡保留完整 gradients;P_os+g+p:参数本身也分片,forward / backward 到某一层时按需 broadcast / all-gather。
Table 1: ZeRO-DP Memory
下面表格重绘自原论文 Table 1,保留英文列名。单位为 GB,表示不同 DP degree 下每张设备的 model-state memory。
| DP | 7.5B Model P_os (GB) | 7.5B Model P_os+g (GB) | 7.5B Model P_os+g+p (GB) | 128B Model P_os (GB) | 128B Model P_os+g (GB) | 128B Model P_os+g+p (GB) | 1T Model P_os (GB) | 1T Model P_os+g (GB) | 1T Model P_os+g+p (GB) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 120 | 120 | 120 | 2048 | 2048 | 2048 | 16000 | 16000 | 16000 |
| 4 | 52.5 | 41.3 | 30 | 896 | 704 | 512 | 7000 | 5500 | 4000 |
| 16 | 35.6 | 21.6 | 7.5 | 608 | 368 | 128 | 4750 | 2875 | 1000 |
| 64 | 31.4 | 16.6 | 1.88 | 536 | 284 | 32 | 4187 | 2218 | 250 |
| 256 | 30.4 | 15.4 | 0.47 | 518 | 263 | 8 | 4046 | 2054 | 62.5 |
| 1024 | 30.1 | 15.1 | 0.12 | 513 | 257 | 2 | 4011 | 2013 | 15.6 |
这张表解释了 ZeRO 的影响力。普通 DP 下,模型状态不随 DP degree 下降;ZeRO 打开 P_os+g+p 后,1T 模型在 1024-way DP 下的模型状态理论上可以降到 15.6GB/卡。论文也提醒:显存够放下不等于训练时间经济可行,1T 模型在当时硬件上端到端训练可能仍需很久。
ZeRO-R:模型状态之外还有 residual states
ZeRO-DP 把 model states 压下去以后,剩下的 activation、temporary buffers 和 fragmented memory 会变成新瓶颈。论文把这一组优化称为 ZeRO-R。
| Component | What it optimizes | Training detail |
|---|---|---|
P_a |
partitioned activation checkpointing | MP 中 activation checkpoints 不再在 model-parallel ranks 上重复保存;需要时 all-gather 还原 |
P_a+cpu |
CPU activation checkpoint offload | 对超大模型可把 partitioned activation checkpoints 放到 CPU,减少 GPU activation footprint |
C_B |
constant-size buffers | 避免 fused temporary buffers 随模型大小线性增长;例如 3B 模型的 32-bit fused buffer 可达 12GB |
M_D |
memory defragmentation | 将 activation checkpoints 和 gradients 搬到预分配连续 buffer,降低碎片导致的 OOM 和 allocator overhead |
论文给了一个很具体的 activation 例子:100B GPT-like 模型、batch size 32、sequence length 1024、MP degree 16,如果每层 checkpoint 一个 activation,单卡 activation checkpoints 约 33GB;用 P_a 后可降到约 2GB,再 offload 到 CPU 时 GPU activation footprint 接近 0。
通信量:为什么它还能像 DP 一样高效
ZeRO 不是简单地“把东西切了”,因为分片必然意味着训练时要取回或聚合状态。论文的关键论证是通信体积仍然接近标准 DP。
标准 DP 的 gradient all-reduce 可以拆成 reduce-scatter + all-gather,两步各移动约 元素,所以每步约 。
P_os+g 的通信路径是:
- gradient partition 用 reduce-scatter,把每个参数 shard 的 gradient 聚合到负责它的 rank;
- 每个 rank 更新自己负责的参数 shard;
- all-gather 更新后的 parameters,让下一步 forward/backward 能使用完整参数。
这两步合起来仍然约 ,和标准 DP 同阶。P_os+g+p 进一步把 parameters 常驻分片,forward/backward 时按层 gather,会把通信量提高到约 1.5x baseline DP,但换来随 线性下降的模型状态显存。
Table 2: Maximum Model Size
下面表格重绘自原论文 Table 2,保留英文列名。左侧是内存分析得到的最大模型规模,右侧是 ZeRO-OS 实测可运行模型规模。
| MP | GPUs | Max Theoretical Model Size Baseline | Max Theoretical Model Size P_os | Max Theoretical Model Size P_os+g | Max Theoretical Model Size P_os+g+p | Measured Model Size Baseline | Measured Model Size ZeRO-DP (P_os) |
|---|---|---|---|---|---|---|---|
| 1 | 64 | 2B | 7.6B | 14.4B | 128B | 1.3B | 6.2B |
| 2 | 128 | 4B | 15.2B | 28.8B | 256B | 2.5B | 12.5B |
| 4 | 256 | 8B | 30.4B | 57.6B | 0.5T | 5B | 25B |
| 8 | 512 | 16B | 60.8B | 115.2B | 1T | 10B | 50B |
| 16 | 1024 | 32B | 121.6B | 230.4B | 2T | 20B | 100B |
这张表说明了 ZeRO 和 MP 的关系:MP 仍然可以作为 batch size、activation 或通信拓扑的工具,但“只是为了让模型状态放得下”这件事,ZeRO-DP 通常更直接。
ZeRO-100B 的实现与实验设置
论文实现并评估的是 ZeRO-100B:P_os+g 的 ZeRO-DP 加 ZeRO-R,而不是完整 P_os+g+p。这是一个务实取舍:完整 ZeRO 理论上能上 1T,但当时算力让 1T 端到端训练不经济,因此实验聚焦 100B 级 GPT-2-like 模型。
| Training / system component | Detail |
|---|---|
| Implementation | PyTorch implementation; compatible with any model implemented as torch.nn.Module |
| Usability | users wrap the model and use ZeRO-powered DP like classic DP; no model rewrite required |
| Hardware | 400 V100 GPUs, 25 DGX-2 nodes, 800 Gbps internode communication bandwidth |
| No-MP baseline | PyTorch distributed data parallel (DDP) |
| MP baseline | Megatron-LM, September 2019 open-source version |
| Model family | GPT-2-like transformer models with varied hidden dimension and number of layers |
| ZeRO with MP | ZeRO-powered DP combined with Megatron-LM model parallelism |
| Implementation focus | efficient support for models around 100B parameters on then-current hardware |
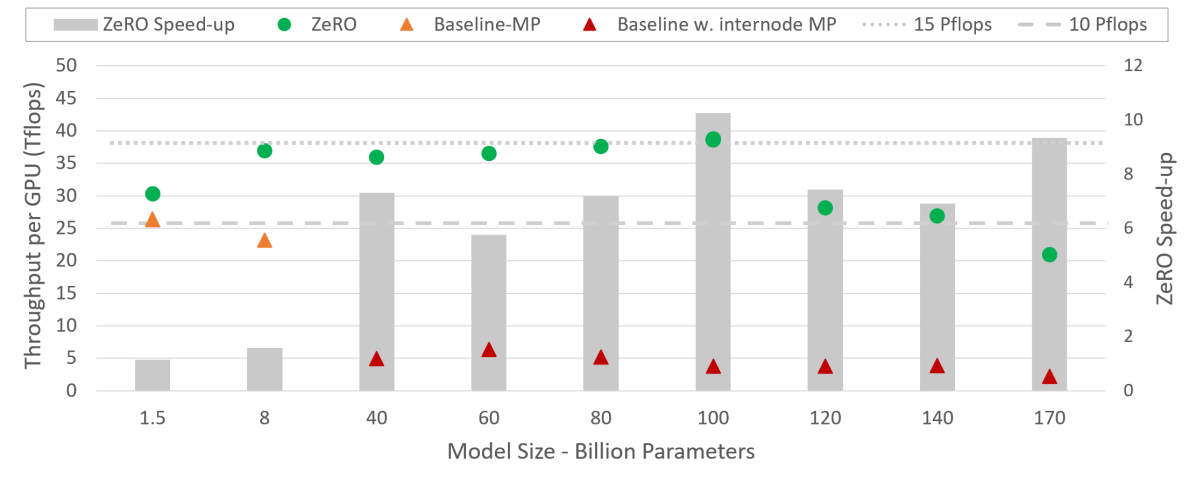
图源:ZeRO Figure 2。原图比较 ZeRO 与 SOTA baseline 在不同模型规模下的 training throughput 和 speedup。ZeRO 的 MP 始终限制在单节点内,而 baseline 在 40B 以上需要跨节点 MP,通信效率快速下降。
论文报告 ZeRO-100B 可在 400 张 V100 上高效运行最高 170B 参数模型;对 8B 到 100B 模型,平均达到约 15 PFLOPs,总体约为硬件峰值 30% 以上。100B 模型上 ZeRO 每 GPU 超过 38 TFLOPs,聚合超过 15 PFLOPs,相比 SOTA baseline 同规模训练有 10x 以上速度提升。
Table 5: Figure 2 Model Configurations
下面表格重绘自原论文 Appendix Table 5,保留英文列名。它解释了 Figure 2 的模型、MP 与 batch 配置。
| Model size | ZeRO/Baseline | Number of GPUs | MP | Layers | Hidden size | Attention head | Batch size | Total batch size |
|---|---|---|---|---|---|---|---|---|
| 1.5B | ZeRO | 400 | 1 | 48 | 1600 | 16 | 24 | 9600 |
| 1.5B | Baseline | 400 | 2 | 48 | 1600 | 16 | 16 | 3200 |
| 8B | ZeRO | 400 | 4 | 72 | 3072 | 24 | 64 | 6400 |
| 8B | Baseline | 400 | 8 | 72 | 3072 | 24 | 8 | 400 |
| 40B | ZeRO | 400 | 4 | 88 | 6144 | 32 | 12 | 1200 |
| 40B | Baseline | 384 | 32 | 88 | 6144 | 64 | 4 | 48 |
| 60B | ZeRO | 400 | 16 | 132 | 6144 | 32 | 64 | 1600 |
| 60B | Baseline | 384 | 64 | 132 | 6144 | 64 | 4 | 24 |
| 80B | ZeRO | 400 | 16 | 100 | 8192 | 64 | 32 | 800 |
| 80B | Baseline | 384 | 128 | 100 | 8192 | 128 | 4 | 12 |
| 100B | ZeRO | 400 | 16 | 125 | 8192 | 64 | 32 | 800 |
| 100B | Baseline | 384 | 128 | 125 | 8192 | 128 | 2 | 6 |
| 120B | ZeRO | 400 | 16 | 150 | 8192 | 64 | 24 | 600 |
| 120B | Baseline | 384 | 128 | 150 | 8192 | 128 | 2 | 6 |
| 140B | ZeRO | 400 | 16 | 175 | 8192 | 64 | 16 | 400 |
| 140B | Baseline | 384 | 128 | 175 | 8192 | 128 | 2 | 6 |
| 170B | ZeRO | 400 | 16 | 212 | 8192 | 64 | 12 | 300 |
| 170B | Baseline | 256 | 256 | 212 | 8192 | 256 | 2 | 2 |
这张表要和 Figure 2 一起读。baseline 为了放下大模型,被迫把 MP 拉到跨节点甚至 128/256-way,导致每个 GPU 的计算粒度变小、通信跨慢链路;ZeRO 则把 MP 控制在单节点 16-way 以内,靠 DP state sharding 拿回显存。
Super-linear Scalability
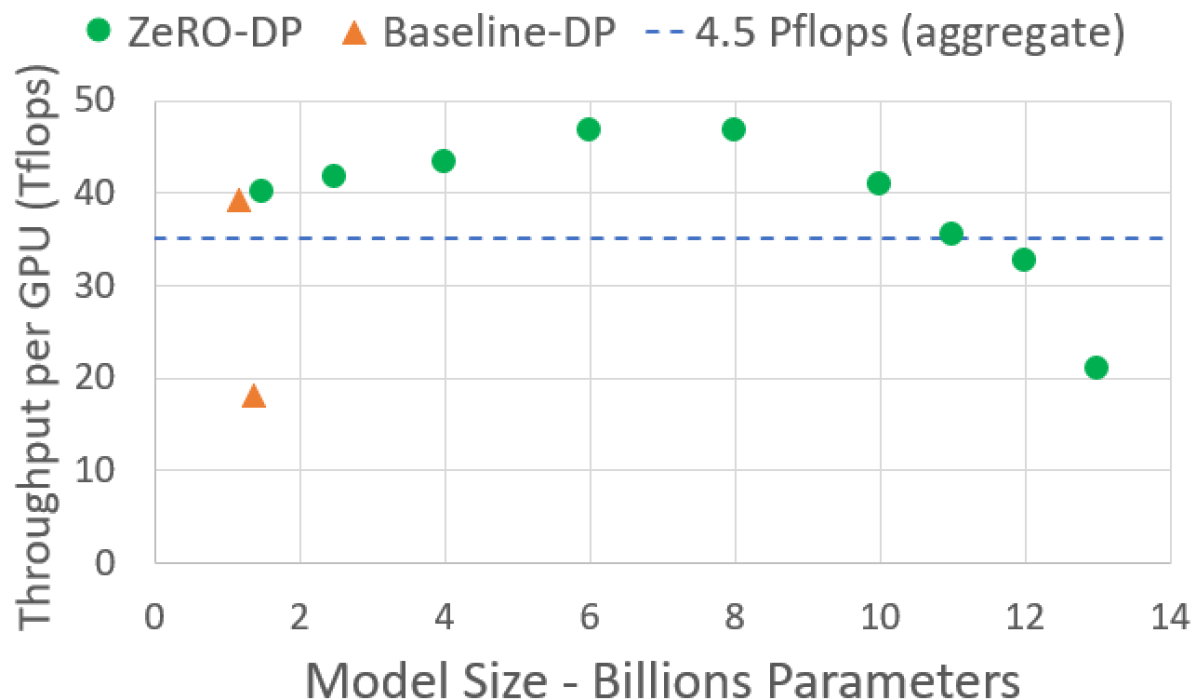
ZeRO 论文最有意思的实验之一是 super-linear scaling:GPU 数变多时,每 GPU throughput 也上升。原因不是违反并行常识,而是 ZeRO-DP 随 DP degree 增大降低每 GPU memory footprint,使单卡能放更大的 batch,从而提高 arithmetic intensity。
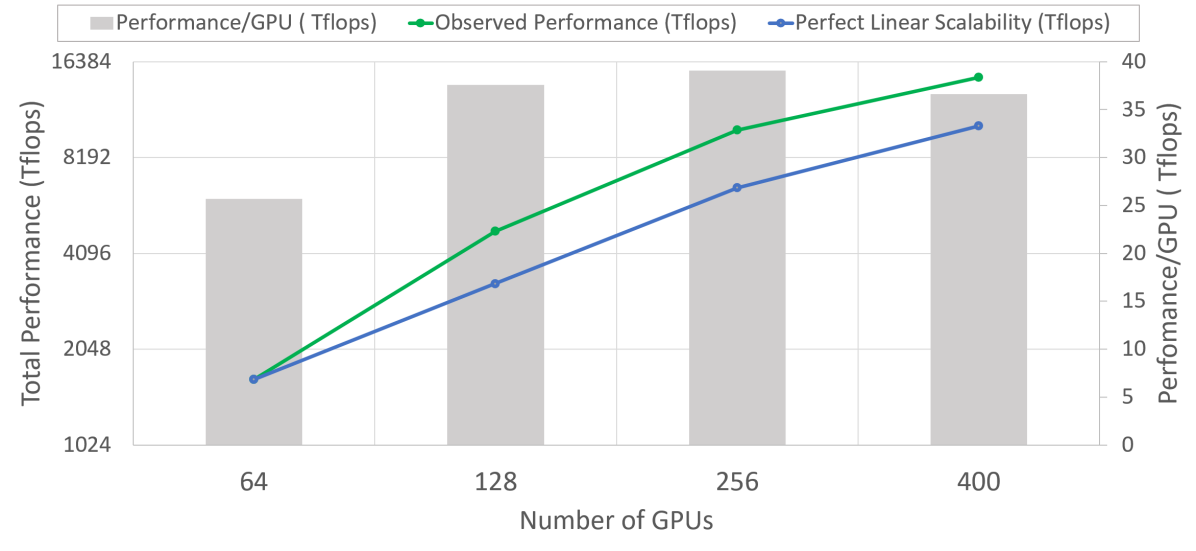
图源:ZeRO Figure 3。原图展示 60B 参数模型从 64 到 400 GPU 时的 speedup 与 per-GPU throughput。论文解释为 ZeRO-DP 减少显存占用后允许更大 per-GPU batch,提高计算效率。
下面表格重绘自原论文 Appendix Table 6,保留英文列名。
| Model size | ZeRO/Baseline | Number of GPUs | MP | Layers | Hidden size | Attention head | Batch size | Total batch size |
|---|---|---|---|---|---|---|---|---|
| 60B | ZeRO | 64 | 16 | 75 | 8192 | 32 | 16 | 64 |
| 60B | ZeRO | 128 | 16 | 75 | 8192 | 32 | 48 | 384 |
| 60B | ZeRO | 256 | 16 | 75 | 8192 | 32 | 48 | 768 |
| 60B | ZeRO | 400 | 16 | 75 | 8192 | 32 | 64 | 1600 |
论文也没有把 super-linear scaling 说成免费午餐。它明确指出 batch 太大会影响 convergence,但这些超大模型在 1K GPU 量级下仍处于 batch 不够大的区间,因此增大 batch 还没有撞到 critical batch size。
ZeRO Configurations 与消融
论文用 C1 到 C5 组合 ZeRO-DP 和 ZeRO-R,用于 Figure 6、Figure 7、Figure 8 的消融。下面表格重绘自原论文 Table 3,保留英文列名。
| Config | ZeRO-DP | ZeRO-R |
|---|---|---|
| 1 | P_os | C_B + M_D |
| 2 | P_os | C_B + M_D + P_a |
| 3 | P_os+g | C_B + M_D |
| 4 | P_os+g | C_B + M_D + P_a |
| 5 | P_os+g | C_B + M_D + P_a+cpu |
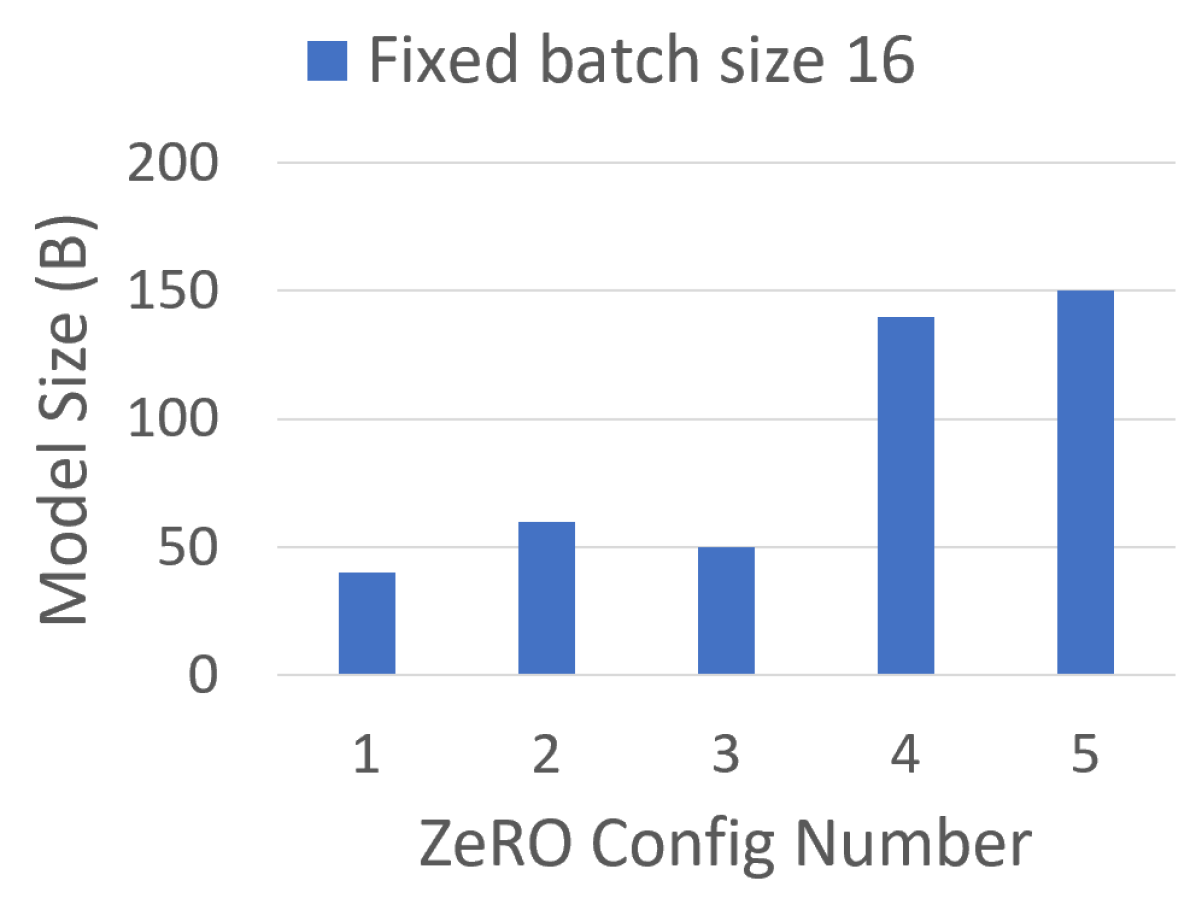
图源:ZeRO Figure 6。原图比较不同 ZeRO configurations 下可运行的 maximum model size。
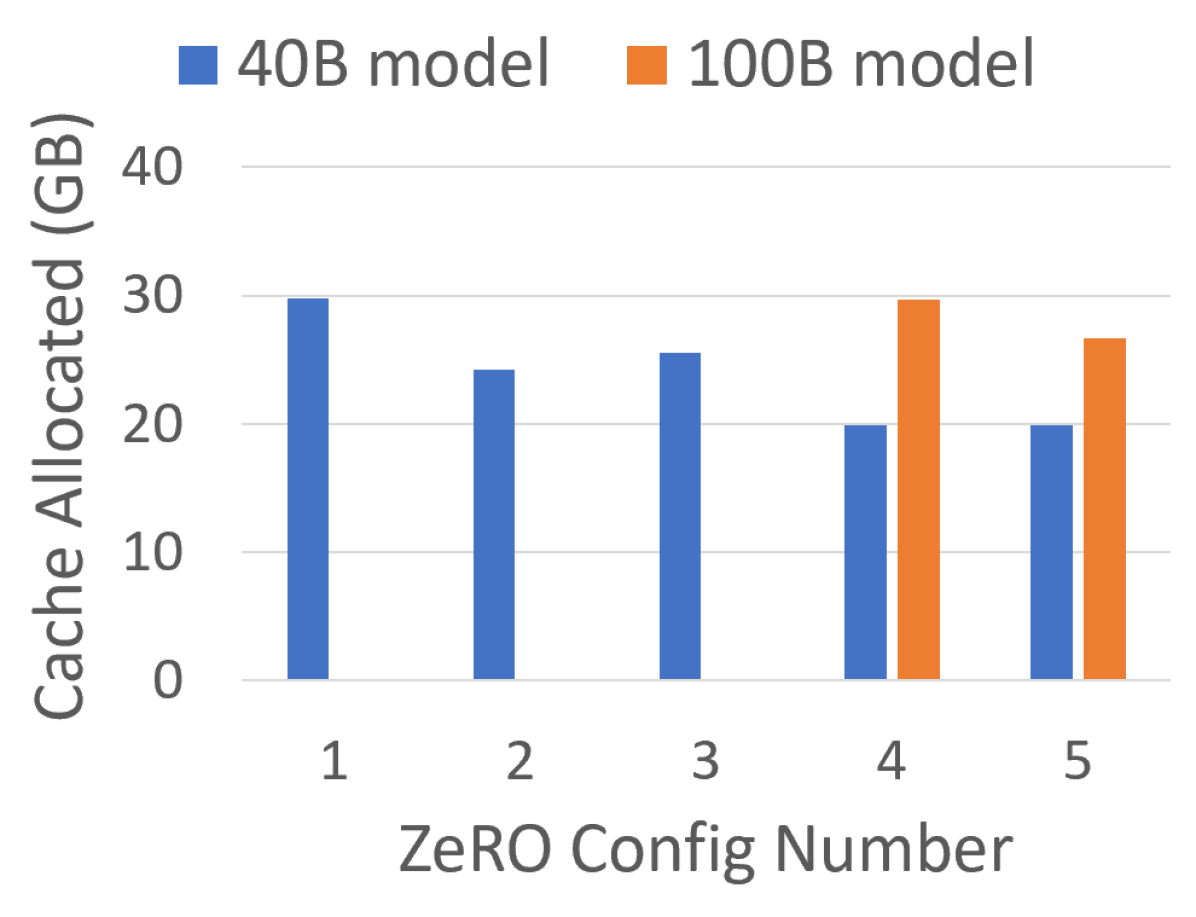
图源:ZeRO Figure 7。原图比较不同 ZeRO configurations 的 PyTorch max cached memory,用于观察状态分片、activation partition 和 CPU offload 对显存峰值的影响。
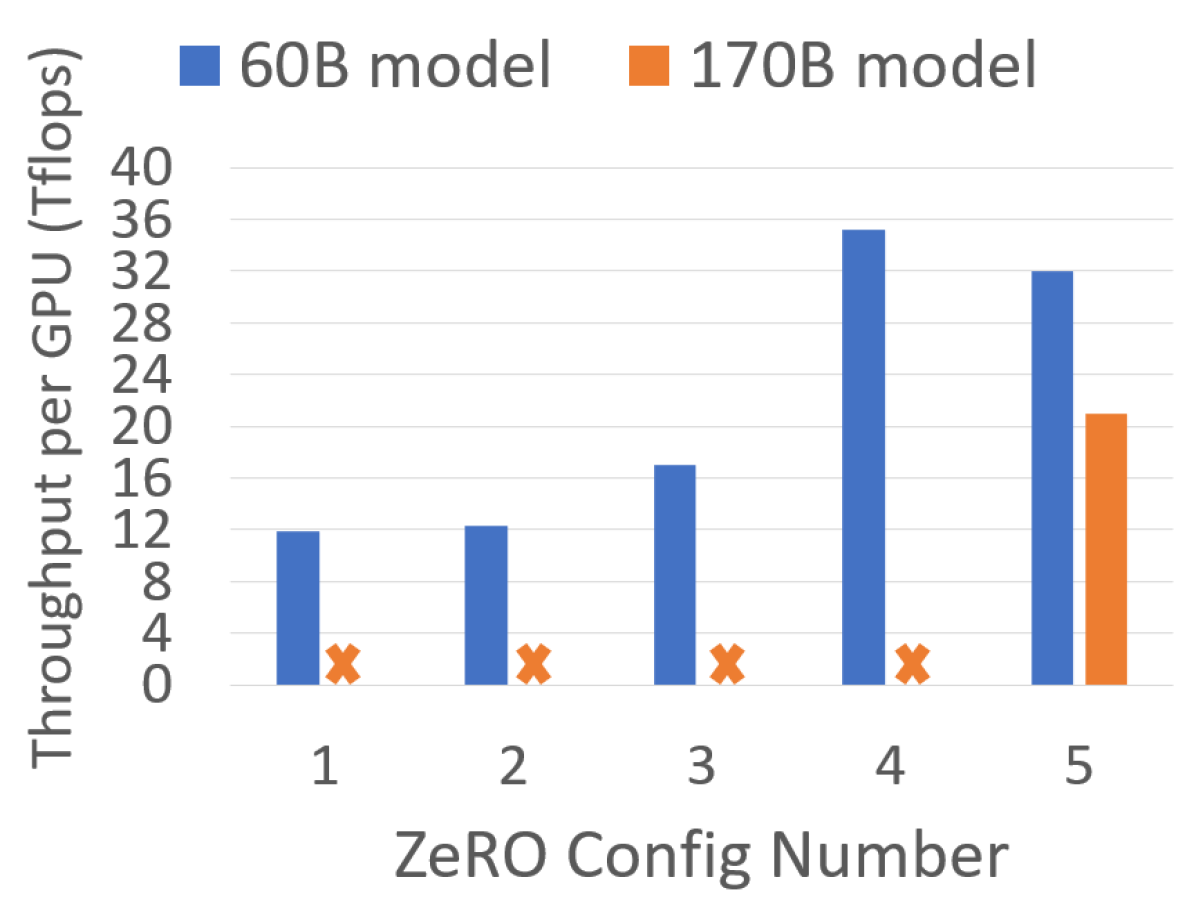
图源:ZeRO Figure 8。原图比较不同 ZeRO configurations 的 per-GPU throughput。C5 虽然显存最低,但 activation CPU transfer 会降低吞吐,因此论文只在收益大于代价时启用 P_a+cpu。
这里最重要的工程结论是:省显存本身不是终点,省出来的显存要么用于跑更大模型,要么用于更大 batch 和更高吞吐;如果 offload 带来的数据搬运超过收益,就不应该打开。
Model Configurations Summary
下面表格重绘自原论文 Table 4,保留英文列名。它把 Figure 2、Figure 3、Figure 5 涉及的模型规模、层数和 hidden dimension 做了汇总。
| Figure 2 model size | Layers | HD | Figures 3, 5 model size | Layers | HD |
|---|---|---|---|---|---|
| 1.5B | 48 | 1600 | 1.16B-2.5B | 24, 34, 54 | 1920 |
| 8B | 72 | 3072 | 4B | 64 | 2304 |
| 40B-60B | 88, 132 | 4096 | 6B-8B | 52, 72 | 3072 |
| 80B-170B | 100, 125, 150 | 8192 | 10B-13B | 50, 54, 58, 62 | 4096 |
| 140B-170B | 175, 212 | 8192 | 60B | 75 | 8192 |
从 100B 到 1T:能放下不等于训练得起
ZeRO 把 1T 模型从“显存不可能”推进到“显存理论可行”,但论文也非常清醒地指出了 compute power gap。它用 BERT-Large 做类比:BERT-Large 在 1024 GPU DGX-2H cluster 上可以 67 分钟训练;1T 参数模型单样本计算量约为 BERT-Large 的 3000 倍。如果假设相同 sequence length 和样本数,1T 训练也要约 140 天;实际更大模型往往还会增加数据量和序列长度,因此可能超过一年,需要 exa-flop 级系统才更合理。
图源:ZeRO Figure 4。原图展示 ZeRO-DP 支撑更大模型时的 maximum model throughput,强调 ZeRO 解决了显存可行性,但训练时间仍受算力制约。
Turing-NLG:系统优化要回到真实模型质量
ZeRO 论文最后用 Turing-NLG 作为真实端到端训练例子。截至论文 v3 的时间点,Turing-NLG 是 17B 参数语言模型,使用 ZeRO-100B 端到端训练,并在 WebText-103 上达到 perplexity 10.21。论文报告这个模型的 sustained throughput 为 41.4 TFLOPs/GPU。
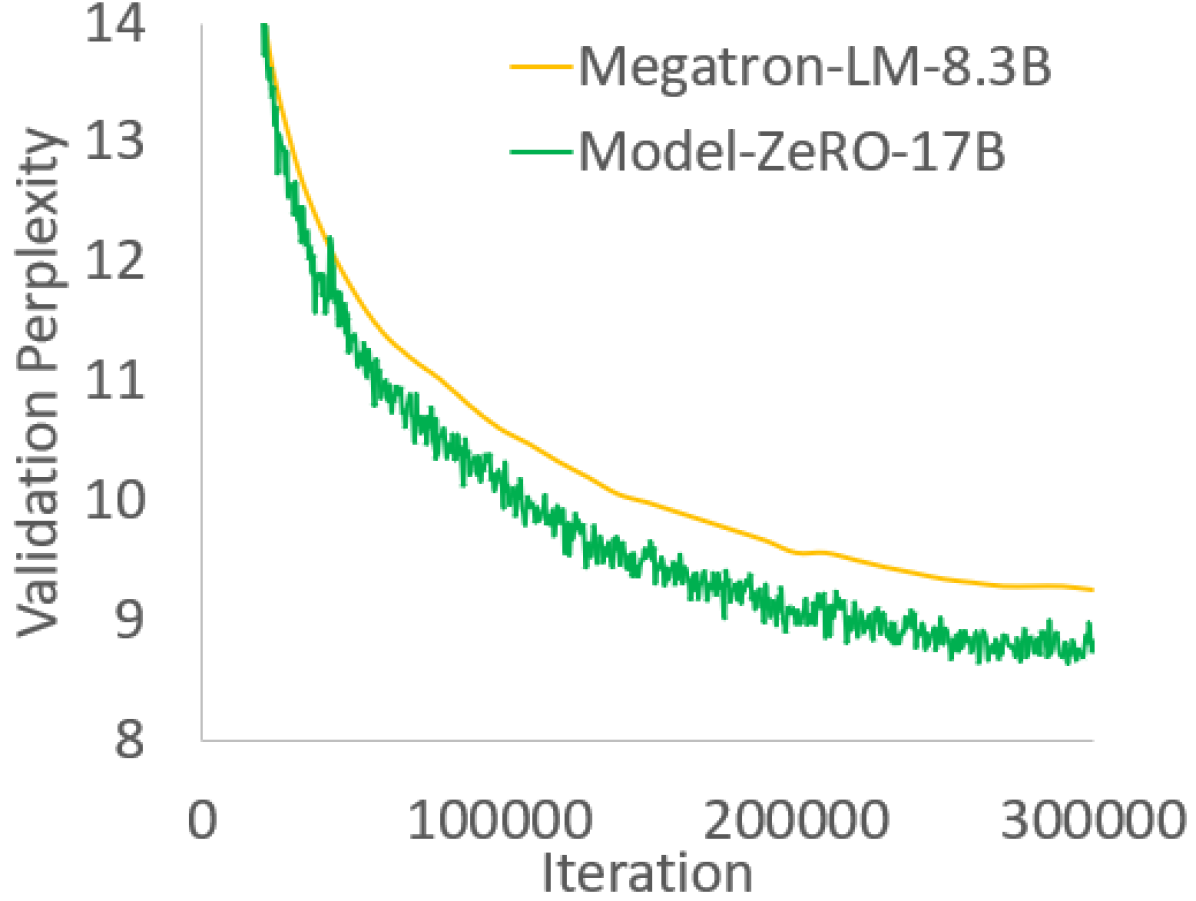
图源:ZeRO Figure 5。原图展示 Turing-NLG 与 Megatron-LM 8.3B 在 300K iterations 内的 validation perplexity 曲线。它把 ZeRO 的系统优化连接到真实语言模型训练质量。
这也是 ZeRO 应该放进“高效训练”而不只是“分布式系统”的原因:好的训练系统必须同时回答三件事:
- 模型状态能不能放下;
- 通信和计算能不能保持高效;
- 省出来的资源有没有转化成真实模型质量。
和 Megatron-LM 的关系
| Question | Megatron-LM | ZeRO |
|---|---|---|
| 主要解决 | 单个 Transformer layer 的大 GEMM 怎么切 | DP 中重复 model states 怎么消掉 |
| 核心维度 | tensor model parallel / intra-layer model parallel | data-parallel state sharding |
| 对模型代码 | 需要使用 column/row parallel modules 等模型并行结构 | 目标是像普通 DP 一样包一层,不要求模型重写 |
| 通信重点 | TP ranks 内的 all-reduce | DP ranks 间的 reduce-scatter / all-gather / parameter gather |
| 显存重点 | 参数和计算分布到 TP ranks | optimizer states、gradients、parameters、activations、buffers、fragmentation |
| 最佳组合 | 大模型、单节点高带宽、需要控制 GEMM shape | 大模型状态冗余高、希望保留 DP 易用性和高计算粒度 |
今天的训练栈通常把两者叠起来用:Megatron 系列负责 TP/PP/CP/EP 等模型与序列维度并行,DeepSpeed ZeRO 或 PyTorch FSDP 负责参数、梯度、optimizer states 的分片与恢复。ZeRO 这篇论文的价值,是把“显存优化”从小技巧变成了一套可以分析通信量、状态生命周期和用户可用性的训练系统方法。
可以直接复用的训练检查表
把 ZeRO 的思路迁移到自己的训练项目时,可以按下面顺序查:
- 先列模型状态账:fp16/bf16 parameters、gradients、fp32 master weights、optimizer states 分别是多少。
- 再列 residual states:activations、checkpointed activations、temporary buffers、communication buffers、fragmentation 是否已经超过模型状态。
- 决定 sharding stage:只分 optimizer states 是否够,还是要分 gradients、parameters。
- 估通信代价:reduce-scatter、all-gather、parameter gather 能不能和 backward/forward 重叠,网络拓扑是否支持。
- 检查 batch 语义:ZeRO 省出的显存是否会被用来增大 batch;增大 batch 是否还在 critical batch size 之前。
- 谨慎打开 offload:CPU activation offload 只有在不打开就 OOM,或者能换来明显更大 batch / model 时才值得。
- 用质量闭环:最终仍要看 validation loss、perplexity 或目标任务指标,不能只看可运行模型规模。
ZeRO 最值得学习的不是某一个具体配置名,而是它的账本方式:先问“哪些状态被重复存了”,再问“这些状态在训练步骤的哪个时间点真的需要”,最后用通信调度把显存和吞吐重新平衡。
- 回到论文总入口:论文专题讲解,用同一套 claim / 图表 / 边界口径横向比较。
- 把本篇结论接回主题:训练与基础系统。
- 按导航顺序继续:Muon:LLM 预训练优化器。
- Title: 论文专题讲解:ZeRO:大模型训练的零冗余状态优化
- Author: Charles
- Created at : 2025-10-31 09:00:00
- Updated at : 2025-10-31 09:00:00
- Link: https://charles2530.github.io/2025/10/31/ai-files-paper-deep-dives-foundations-zero/
- License: This work is licensed under CC BY-NC-SA 4.0.