
强化学习:MDP、价值函数与 Bellman
这篇回答的问题。 如何理解“MDP、价值函数与 Bellman”背后的核心机制、适用边界和下一步阅读路径。
强化学习最核心的问题不是“用哪个算法”,而是:一个 agent 现在做出的动作,会怎样改变未来,以及怎样把未来的好坏反推回当前动作。 MDP 给出决策问题的语言,value function 给出未来收益的度量,Bellman 方程给出递归学习未来的方法。
如果这三件事没有讲清楚,后面的 PPO、GRPO、Dreamer、Offline RL 和世界模型都会变成一串名词。反过来,只要你能读懂 Bellman 在做什么,就能看出大多数 RL 方法到底是在学 policy、学 value、学 transition,还是在用世界模型替代真实环境试错。
先用一个很小的“未来账本”例子进入。机器人面前有两条路:左边路近,但地上有水,可能打滑;右边路远,但更稳。当前 reward 可能会偏向左边,因为它离目标更近;value 会把后面的风险也算进去:如果打滑会导致任务失败,左边当前看起来赚,长期反而亏。Bellman 方程做的事,就是把“下一步拿到什么”和“下一步之后还剩多少机会”合成一笔账,再把这笔账反推回当前状态和动作。
MDP 在描述什么
MDP,全称 Markov Decision Process,通常写成:
这行公式不是为了显得数学化,它是在说一个决策问题需要五个部件:
| 部件 | 问的问题 | 例子 |
|---|---|---|
| 世界可能处在什么状态 | 游戏画面、机器人位姿、prompt 加生成前缀 | |
| agent 能做什么动作 | 移动摇杆、机械臂控制量、下一个 token | |
| 动作会怎样改变状态 | 向右走后角色位置变化,夹爪闭合后物体可能被抓起 | |
| 当前结果好不好 | 得分、成功信号、规则奖励、人类偏好分数 | |
| 多远的未来还算重要 | 近视控制取小一些,长期任务取大一些 |
把“找钥匙”写成 MDP:状态是你已经检查过哪些地方、当前看到什么、还剩多少时间;动作是看桌面、开抽屉、翻外套;奖励是找到钥匙加分,浪费时间扣分。MDP 的意义是让“现在做什么”可以被分解成“这个动作会把我带到什么状态,以及后面还有多少机会”。
State 不是 observation
很多读者第一次学 RL 会把 state 和 observation 混在一起。observation 是传感器当前看到的东西,state 是足以预测未来的内部描述。摄像头只看到桌面,这是 observation;钥匙可能在外套里、刚才抽屉已经查过、桌面反光导致识别不可靠,这些才更接近 state。
机器人和 VLA 多数时候面对的是 POMDP,也就是部分可观测决策问题。模型只能看到图像、语言、关节角和历史动作的一部分,必须用历史窗口、RNN/RSSM hidden state、Transformer memory 或 latent belief 把缺失信息压进内部状态。世界模型的一个基本任务,就是把 observation 变成更接近 state 的 latent。
Markov 假设在省什么
MDP 的关键假设是 Markov property:
这行公式的意思是:如果当前状态 已经足够完整,那么预测下一状态 时,不需要再把更早的完整历史都拿出来。左边把从第一步到当前的历史全列出来,右边只保留当前状态和当前动作。Markov 假设不是说真实世界没有历史,而是说“有用历史已经被状态编码进去了”。
这也是世界模型为什么重视 latent state。一个只看当前 RGB 图像的模型,很难判断杯子是否刚被推过、门是否卡住、物体背后是否有遮挡;一个好的 latent dynamics 应该把这些会影响未来的因素保留下来。RSSM、belief state、KV memory 和长上下文,本质上都在帮模型构造更接近 Markov 的状态。
Policy 是行为规则
策略写成:
公式读法很直接:在状态 下,参数为 的策略选择动作 的概率是多少。确定性策略可以理解成“同一状态总输出同一动作”;随机策略输出一个分布,允许探索和多样性。
LLM 后训练也能放进这个语言里:状态是 prompt 加已经生成的前缀,动作是下一个 token,trajectory 是完整回答,reward 是规则检查器、reward model 或人类偏好给出的分数。机器人 VLA 里,状态通常包含图像、语言、关节状态和历史动作,动作可能是连续控制向量,也可能是 action token 或 action chunk。
Reward、return、value 的差别
单步 reward 是当前反馈:
它只回答“这一步好不好”。但 RL 关心的是长期后果,所以需要 return:
这里 是从第 步开始往后看的总收益。当前奖励权重是 1,下一步奖励乘 ,再下一步乘 。 越接近 1,越远的未来越能影响当前决策。
Value function 把这种未来收益变成“状态的价格”:
这行公式在说:如果现在处在状态 ,之后都按照策略 行动,那么平均能拿到多少 return。注意这里有期望 ,因为策略可能采样不同动作,环境 transition 也可能随机。
Q-value 则多固定了当前动作:
它问的是:如果当前状态是 ,第一步强制做动作 ,之后再按策略 行动,平均能拿多少。很多控制问题真正需要的是 Q-value,因为 agent 要在多个动作之间比较。
| 概念 | 关心什么 | 常见用途 |
|---|---|---|
| reward | 当前一步反馈 | 训练 reward model、规则奖励、任务打分 |
| return | 从当前开始的累计未来反馈 | Monte Carlo policy gradient |
| value | 当前状态整体值多少钱 | baseline、critic、bootstrap |
| Q-value | 当前动作之后值多少钱 | Q-learning、DQN、action selection |
| advantage | 当前动作比平均动作好多少 | PPO、Actor-Critic、GRPO 的相对更新 |
Bellman 方程真正递归了什么
Bellman 方程把“当前价值”拆成“当前奖励 + 下一状态价值”:
这个公式可以按三步读:
- 在状态 下,策略 采样动作 。
- 环境 transition 根据 产生下一状态 。
- 当前状态的价值等于当前奖励 ,加上下一状态价值 的折扣。
Bellman 的厉害之处在于它把一个长远问题变成局部递归。你不用等到整局结束才知道当前状态有没有价值,可以用“下一步奖励 + 下一状态价值估计”来更新当前价值。这就是 bootstrap。
回到上面的两条路例子,Bellman 不是只问“左边现在离目标近不近”,而是问:
1 | 左边价值 = 左边这一步的奖励 + 折扣 * 打滑或成功后的状态价值 |
如果环境模型或历史经验告诉你左边打滑概率高,那么左边的下一状态价值会下降。这样当前动作选择就不会被眼前一步奖励骗走。世界模型、critic、risk head 和 planner 都在用不同方式估这笔未来账。
Q-value 的 Bellman 形式是:
这里当前动作 已经固定,所以外层只对下一状态 取期望;到了下一状态,再按策略 采样后续动作 。这就是“先固定当前动作,再评估未来行为”的表达。
Discount 是时间预算,不是玄学参数
决定未来奖励对当前决策还有多大影响。一个粗略的 effective horizon 是:
如果机器人控制频率是 20Hz,可以粗略估算:
| 等效步数 | 等效真实时间 | |
|---|---|---|
0.95 |
20 steps |
1s |
0.99 |
100 steps |
5s |
0.995 |
200 steps |
10s |
这不是说 越大越好。更长 horizon 可以看到长期后果,但也会放大 transition error、reward misspecification 和 value overestimation。假设世界模型每一步有 2% 的关键接触误判概率,那么 100 步内至少出现一次误判的概率是:
所以在世界模型和机器人控制里,、rollout horizon、控制频率和模型误差必须一起定。短 horizon 容易贪心,长 horizon 容易被模型漏洞欺骗。
从 Bellman 到 Q-learning
Q-learning 用 Bellman 思路构造 TD target:
这行公式在说:当前训练目标 等于这一步真实拿到的奖励 ,加上下一状态里“当前估计最好的动作价值”的折扣值。然后让当前网络预测靠近这个目标:
第一行是“未来账本”,第二行是“把当前估计往账本上靠”。这里最危险的地方也很明显: 里面有模型自己的估计 。如果下一状态价值被高估,当前价值也会被带偏。DQN 用 target network 和 replay buffer 稳定这个过程。
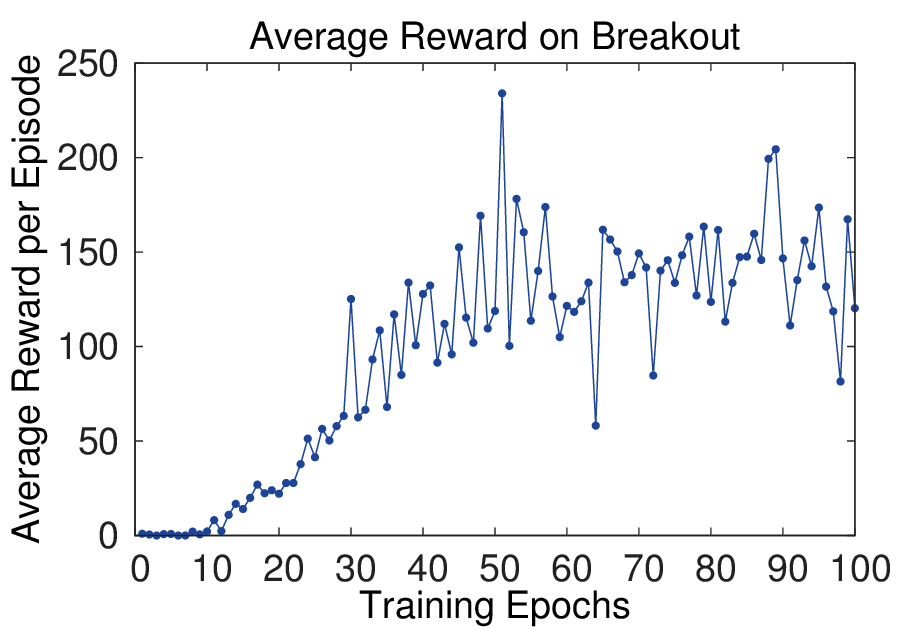
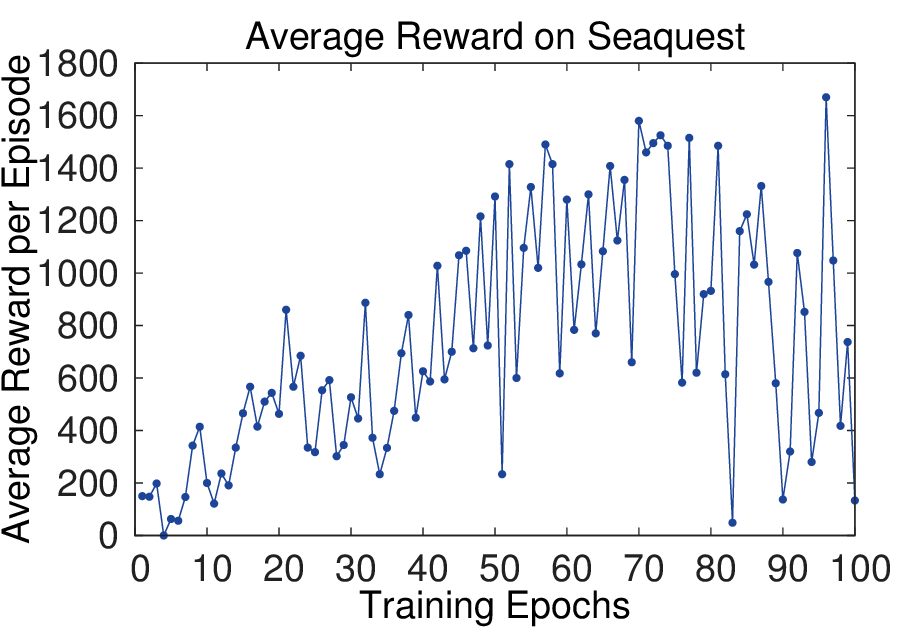
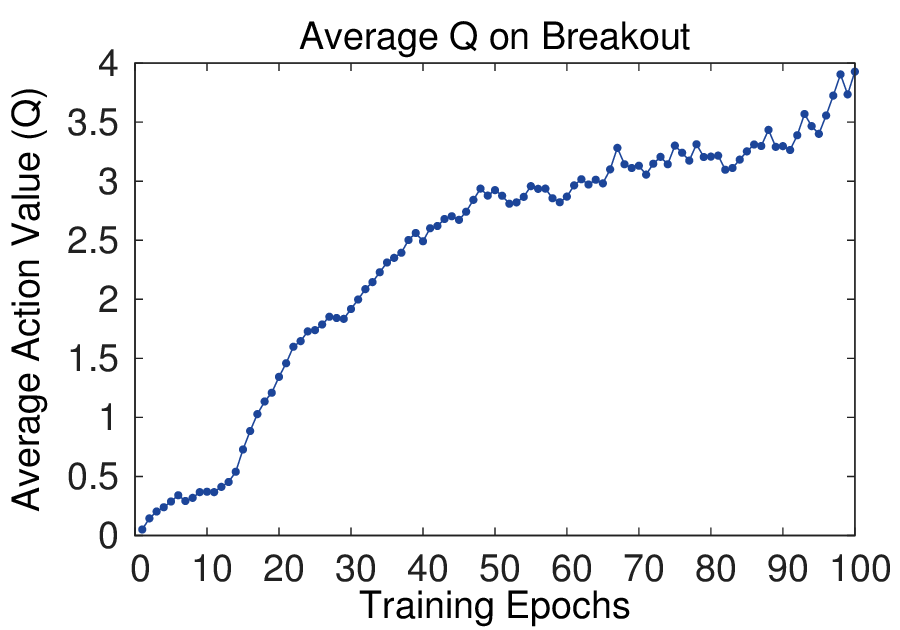
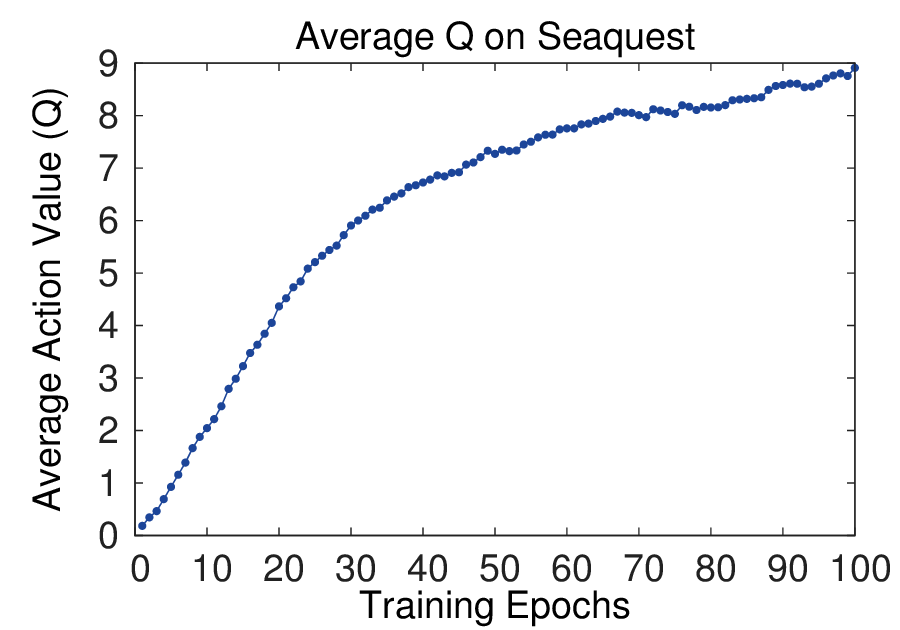
图源:Playing Atari with Deep Reinforcement Learning,Figure 2。原图表达:Breakout 和 Seaquest 训练中的平均奖励曲线与固定状态集合上的平均最大 Q-value。本站用它说明:reward 曲线反映策略实际玩出的结果,value 曲线反映模型对固定状态未来机会的估计,两者都要看。
Value 学到的是未来机会
DQN 的 Seaquest 例子很适合解释 value:value 不是当前分数,而是“接下来可能得分的机会”。




图源:Playing Atari with Deep Reinforcement Learning,Figure 3。原图表达:Seaquest 中 30 帧片段的预测 value,以及 A/B/C 三个时刻的游戏画面。本站读法:A 点敌人出现,未来得分机会变大;B 点鱼雷即将命中,value 达到高点;C 点机会消耗后 value 回落。
这个图能帮你分清 reward 和 value:reward 是“打中敌人那一下”的即时分数,value 是打中之前模型已经看到的未来机会。世界模型中的 value head、reward head、risk head 也是类似逻辑:不是为了复述画面,而是为了判断未来后果。
On-policy、off-policy 和 offline 的差别
Bellman 方程让 RL 可以从历史数据里学习,但数据来源会决定风险。
| 类型 | 数据从哪里来 | 主要风险 |
|---|---|---|
| on-policy RL | 当前策略刚采样的数据 | 样本贵,rollout 吞吐低,方差大 |
| off-policy RL | replay buffer 里的历史数据,还会继续收新数据 | 旧数据和当前策略差太远 |
| offline RL | 固定数据集,不再和环境交互 | 分布外动作的 value 容易被高估 |
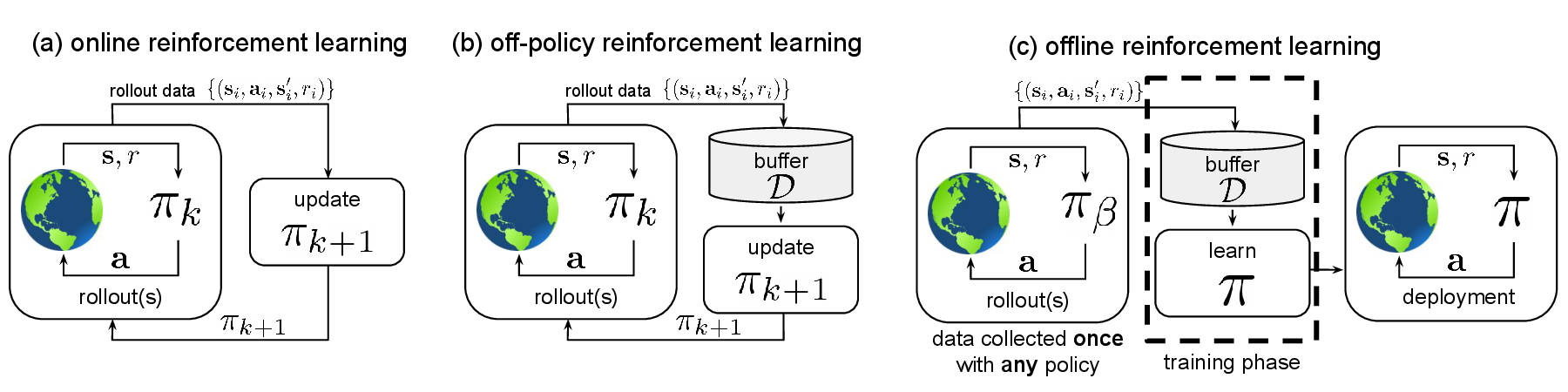
图源:Offline Reinforcement Learning: Tutorial, Review, and Perspectives on Open Problems,Figure 1。原图表达:classic online RL、classic off-policy RL 和 offline RL 的数据收集与训练关系。本站读法:机器人、医疗、自动驾驶和大模型后训练常接近 offline 设置,因为真实试错成本高。
Offline RL 最难的是分布外动作。模型可能会选择数据里几乎没出现过的动作,而这个动作的 Q-value 只是网络外推出来的,可能虚高。保守价值估计、behavior constraint、support constraint 和真实回放校准,都是在解决这个问题。
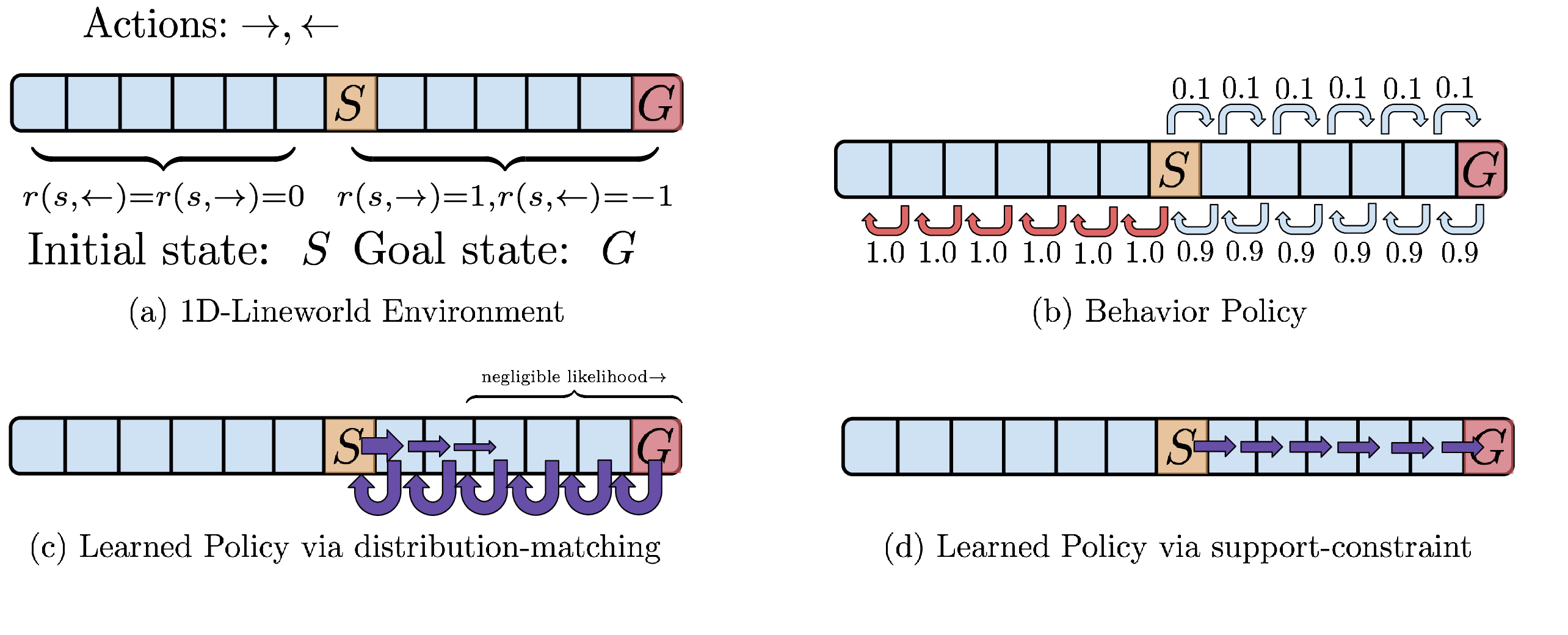
图源:Offline Reinforcement Learning: Tutorial, Review, and Perspectives on Open Problems,Figure 4。原图表达:distribution constraint 和 support constraint 的差别。本站读法:VLA 既要避免完全没见过的危险动作,又不能死板模仿示范数据里频率最高但并非最优的动作。
和世界模型的接口
世界模型补的是 MDP 里的 transition:
这里的帽子 很重要:它表示“模型预测”,不是真实环境。如果世界模型还预测 reward、done 和 risk:
那么 planner 或 actor 就可以在执行前比较候选动作后果。Bellman 语言会变成:用 和 估计未来价值,再选择让 return 更高、risk 更低的动作。
这也是世界模型最大的机会和最大风险。机会是把真实试错换成内部 rollout,减少机器人小时数和昂贵评测;风险是策略会利用模型漏洞,在 latent 里拿高分,真实世界失败。因此读任何世界模型论文都要问四个问题:
| 问题 | 为什么关键 |
|---|---|
| transition 是否 action-sensitive | 换动作时未来预测是否真的改变 |
| reward/done/risk 是否校准 | 未来账本是否反映真实任务结果 |
| rollout horizon 是否合理 | 长时错误是否被 value 或 planner 放大 |
| 是否有闭环验证 | open-loop prediction 好看不等于策略更好 |
外部精读
- Sutton & Barto: Reinforcement Learning, 2nd Edition:MDP、value、Bellman、dynamic programming 的经典教材。
- OpenAI Spinning Up: RL Intro:用工程视角解释 policy、trajectory、return 和 RL 算法族。
- Playing Atari with Deep Reinforcement Learning:DQN、experience replay、target network 和 value 曲线的原始来源。
- Offline RL Tutorial, Review, and Perspectives:理解 offline RL、分布外动作和保守约束的好入口。
读完以后怎么判断
MDP 定义决策问题,policy 定义怎么行动,reward 评价当前反馈,value 把未来机会压成数字,Bellman 方程把长期未来拆成可递归学习的局部目标。世界模型并没有绕开这些概念,它只是把真实 transition 换成可学习的 ,让 agent 能在执行前估算动作后果。
相关阅读与下一步
- 外部材料:Spinning Up:Policy Optimization。
- 外部材料:PPO 论文。
- 外部材料:Soft Actor-Critic 论文。
- 站内下一步:强化学习专题。
- 站内下一步:MDP、价值函数与 Bellman。
- 站内下一步:世界模型中的强化学习。
- Title: 强化学习:MDP、价值函数与 Bellman
- Author: Charles
- Created at : 2025-12-24 09:00:00
- Updated at : 2025-12-24 09:00:00
- Link: https://charles2530.github.io/2025/12/24/ai-files-reinforcement-learning-mdp-value-bellman/
- License: This work is licensed under CC BY-NC-SA 4.0.