
训练:分布式训练与 Checkpoint
当模型规模走向几十亿、上百亿参数,训练问题很快不再只是“学习率怎么调”,而是“算力、显存、通信、数据顺序、存储和故障恢复能不能共同支撑一次长跑”。分布式训练决定训练能不能跑快,checkpoint 决定训练能不能跑完、跑坏后能不能继续、产物能不能被后训练和推理复用。
这页建议和 Megatron、DeepSpeed 与训练栈、输入管线、Packing 与吞吐、训练稳定性与故障排查 一起读。它们分别覆盖训练框架、数据吞吐和数值/系统异常,本页聚焦并行拓扑与恢复资产。
分布式训练不是把模型随便切到多张卡上。你要同时管理显存、通信、pipeline bubble、数据顺序和 checkpoint 恢复语义。
人多不一定快。如果楼道太窄、箱子交接混乱、有人中途离开还没人记录进度,整体反而慢。分布式训练也要设计分工、通信和恢复点。
一、为什么单卡思维会失效
单卡训练里,主要矛盾通常是模型结构、batch size、优化器和数据质量;分布式训练里,会额外遇到一组硬约束:参数、梯度、优化器状态和激活放不下,通信吞吐会吃掉理论 FLOPs,pipeline bubble 和 micro-batch 设计会影响利用率,数据顺序与随机状态必须可恢复,任意一台机器故障都可能拖垮整个作业,而 checkpoint 的保存、恢复、迁移和归档也会变成系统工程。
设模型参数量为 ,每个参数字节数为 ,优化器状态倍数为 ,仅模型状态所需显存约为:
对 Adam/AdamW 来说,参数本身往往不是最大头,梯度、master weights、一阶动量、二阶动量和混合精度状态会一起放大内存压力。再叠加长上下文激活、MoE dispatch buffer 和通信 bucket,真实峰值通常高于纸面估算。
分布式设计的目标不是“把所有并行开关都打开”,而是让模型结构、序列长度、全局 batch、硬件拓扑、网络带宽和恢复策略匹配。一个好的设计应同时回答:单卡峰值显存是否安全,高频通信是否留在高速互联域,pipeline bubble 是否可接受,checkpoint 是否能在目标时间内保存和恢复,world size 或节点故障变化后是否还能续训,以及训练产物是否能直接服务 SFT、评测和推理导出。
二、并行维度:从 DP 到 ND Parallelism
现代大模型训练通常把 world size 拆成多个正交维度:
这些维度分别解决不同瓶颈:
| 并行维度 | 主要解决什么 | 主要代价 | 常见约束 |
|---|---|---|---|
DP 数据并行 |
横向扩展 batch 和吞吐 | 梯度同步 | 大 batch 稳定性、AllReduce |
TP 张量并行 |
单层 GEMM/Attention 太大 | 层内高频通信 | 尽量放在 NVLink 等高速域 |
PP 流水线并行 |
模型层数太深、单卡放不下 | bubble、调度复杂 | micro-batch 数和 stage 切分 |
SP/CP 序列/上下文并行 |
长序列激活和注意力内存 | 注意力通信复杂 | 依赖长上下文 kernel 与拓扑 |
EP 专家并行 |
MoE 容量扩展 | token dispatch/gather | 负载均衡、容量因子、路由稳定 |
数据并行与 ZeRO/FSDP
普通 DP 每张卡保存完整模型副本,通过 AllReduce 同步梯度。它概念简单,但会完整复制参数、梯度和优化器状态。ZeRO 和 FSDP 的核心思想是减少这种冗余:平时只保存自己负责的状态分片,需要计算时再 gather,用完释放。
可以粗略理解为:ZeRO Stage 1 先分片优化器状态,Stage 2 继续分片梯度,Stage 3 连参数也分片;FSDP 更贴近 PyTorch 原生 module wrapping 和按需 gather。
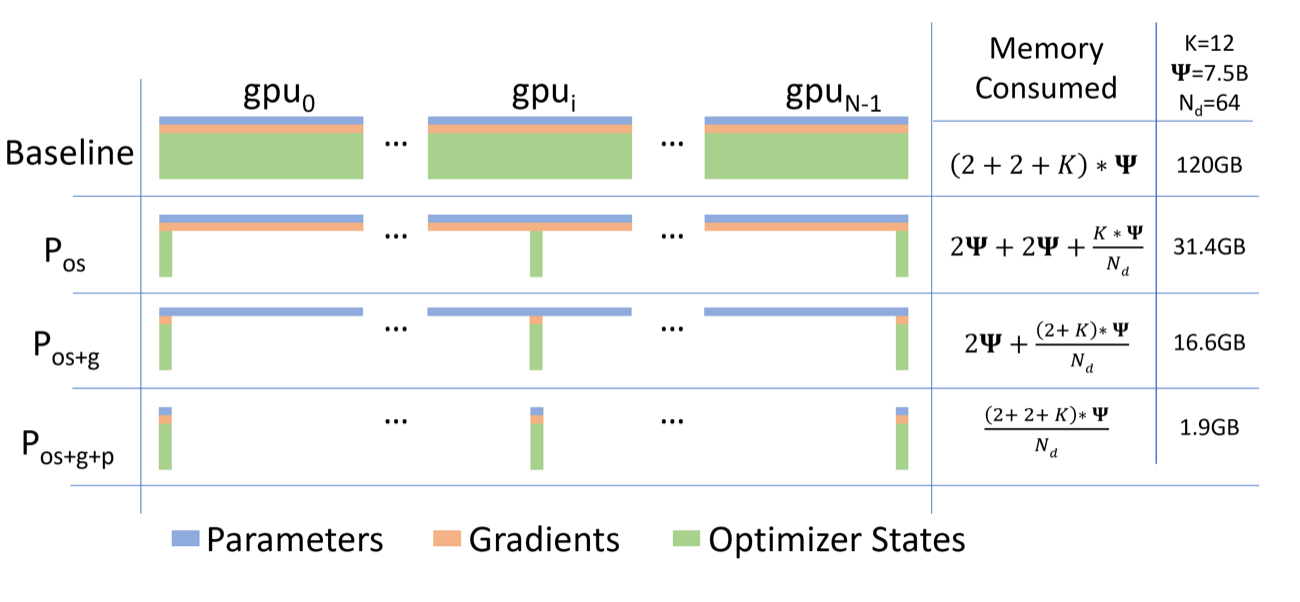
图源:ZeRO: Memory Optimizations Toward Training Trillion Parameter Models,Figure 1。原论文图意:比较普通数据并行和 ZeRO-DP 三个阶段的单设备模型状态显存; 表示参数量, 表示优化器状态的显存倍数, 表示数据并行度。
图里的 optimizer states、gradients、parameters 是训练态显存的三大常驻部分。普通数据并行会在每张卡上完整复制这些状态;ZeRO Stage 1 先把优化器状态按 DP 组切开,Stage 2 再切梯度,Stage 3 连参数也按需分片。它不是减少数学计算量,而是把“每张卡都存一整份”的冗余改成“每张卡只长期保留一部分”,代价是训练过程中需要更多 gather、scatter 和 checkpoint 元数据。
两者的共同代价是状态管理、通信和 checkpoint 复杂度上升。显存不是免费省出来的,而是用更多 gather/scatter、元数据和恢复逻辑换来的。
张量并行、序列并行与上下文并行
TP 把单个线性层、注意力投影或 MLP 矩阵拆到多卡。它适合 hidden size 很大、单层 GEMM 太大的模型,但通信非常频繁,通常应优先限制在节点内高速互联域。
SP 常和 TP 搭配,把一部分原本重复保存的序列维激活分摊到不同 rank。CP 更直接面向超长上下文,把上下文片段切到多个设备,并在注意力阶段做必要通信。序列长度从 4k 走向 32k、128k 以后,长上下文训练往往必须联合使用 CP、activation checkpointing、FlashAttention 变体和通信重叠。
流水线并行与专家并行
PP 按层切模型,微批次像流水线一样流过不同 stage。若 pipeline 段数为 ,micro-batch 数为 ,理想利用率可近似写成:
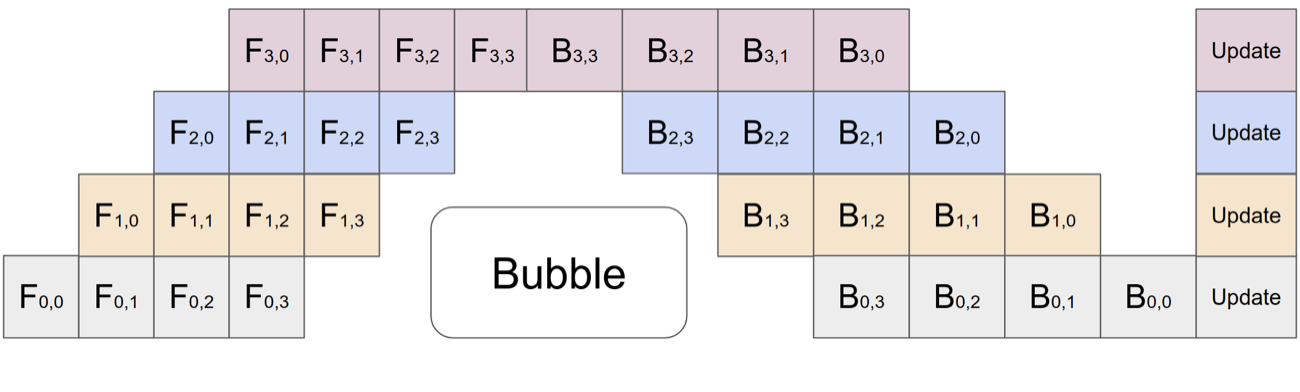
图源:GPipe: Efficient Training of Giant Neural Networks using Pipeline Parallelism,Figure 2©。原论文图意:将一个 mini-batch 拆成多个 micro-batch,使不同 accelerator 能在同一时间处理不同 micro-batch 的不同模型分段,并在末尾同步应用梯度。
如果只有一个大 batch 顺序通过所有 stage,很多 GPU 会在等待前后 stage 时空转。GPipe 图中的 表示第 段前向, 表示对应反向;micro-batch 让 stage 1 处理下一小批时,stage 2/3/4 同时处理前面小批的后续层。micro-batch 越多,流水线越容易被填满,但也会增加激活保存、调度和优化器语义的复杂度,所以它不是越大越好。
micro-batch 太少会有大量 bubble,太多又会影响激活保留、优化行为和调度复杂度。1F1B 和 interleaved pipeline 的目的都是减少空泡,但会增加调试和恢复复杂度。
EP 主要服务 MoE。它让 token 只经过部分专家,解耦参数规模和单 token 计算量。但 token dispatch/gather、专家负载均衡、容量因子、token drop 和路由稳定性会成为新瓶颈。MoE 的并行设计通常比稠密模型更依赖拓扑和通信实现。
从技术报告看 pipeline bubble 和通信重叠
技术报告里的训练系统图经常看起来像“彩色甘特图”,但它们讲的其实是同一个基础问题:GPU 不应花太多时间等通信、等前后 stage、等 checkpoint。DeepSeek-V3 的 DualPipe 和 Kimi K2 的训练基础设施都在围绕这个问题做不同折中。

图源:DeepSeek-V3 Technical Report,Figure 5。原论文图意:8 个 PP ranks、20 个 micro-batches 的 DualPipe scheduling 示例,两个方向的 micro-batches 对称推进,黑框表示互相 overlap 的计算和通信。
Pipeline parallelism 像多段生产线。前几拍和后几拍必然有人空等,这就是 pipeline bubble。DualPipe 的思路是从 pipeline 两端同时推进 micro-batches,并把 forward/backward 中的通信和计算互相压在一起。图里真正重要的不是颜色本身,而是黑框代表的 overlap:同一段墙钟时间里,GPU 尽量同时做计算和通信。

图源:Kimi K2: Open Agentic Intelligence,Figure 7。原论文图意:展示不同 PP phases 中 computation、communication 和 offloading 的 overlap。
Kimi K2 是 1T 级 MoE,报告强调 DualPipe 会带来参数和梯度内存翻倍,对超大模型不一定划算。它选择在 interleaved 1F1B 中重叠 EP all-to-all、PP communication、weight-gradient computation 和 activation offload。这个例子提醒我们:训练系统不是“哪个 schedule 最先进就用哪个”,而是看模型规模、内存、通信拓扑和 checkpoint 目标能否一起闭合。
读训练系统图时,可以按三层问:
| 图里看到的东西 | 基础概念 | 应该追问 |
|---|---|---|
| 空白或等待段 | pipeline bubble | micro-batch 数和 stage 切分是否合适 |
| all-to-all / dispatch | MoE 专家通信 | expert 是否跨节点,通信是否被计算隐藏 |
| offload / recomputation | 显存换时间 | CPU/重计算是否真的不拖慢主链 |
| async checkpoint | 恢复资产写入 | manifest、一致性和恢复时间是否可验 |
这也是为什么大模型训练论文越来越像系统论文。模型结构决定要通信什么,parallelism 决定在哪里通信,kernel 和调度决定能不能把通信藏起来,checkpoint 决定长跑失败后能不能继续。
三、训练系统栈:Megatron、DeepSpeed、FSDP 与重计算
从工程定位看,常见训练栈可以粗略拆成四层:Megatron-LM / Megatron Core 负责模型并行与 Transformer 构件,DeepSpeed / ZeRO / FSDP 负责运行时和内存优化,NCCL / Transformer Engine / FlashAttention / 融合算子负责通信与 kernel,checkpoint、日志、数据进度、实验配置和恢复流程则负责作业资产管理。
Megatron 路线
Megatron 更像“大规模 Transformer 训练参考系统”。它的价值不只是 TP/PP,而是把 TP、PP、DP、EP、CP、通信重叠、混合精度和 checkpoint 放在同一套训练管线里考虑。适合超大稠密模型、MoE、长上下文和对 MFU 有高要求的场景。
代价是系统复杂度更高。它不是“最轻量训练脚手架”,而是更偏大规模训练工程底座。
DeepSpeed 与 ZeRO 路线
DeepSpeed 更偏训练运行时和内存优化平台,代表能力包括 ZeRO、offload、pipeline runtime、异步 I/O 和配置化训练引擎。它适合在 DP 放不下、但又不想立刻进入重 TP/PP 设计时,先通过状态分片和 offload 把模型训起来。
Megatron + DeepSpeed 常一起出现,是因为二者擅长的层面不同:Megatron 负责模型怎么拆,DeepSpeed 负责拆完以后如何更省内存、更好调度、更容易接入运行时能力。
FSDP 与原生生态
FSDP 更贴近 PyTorch 原生 distributed stack,适合模型结构定制较多、希望减少特定训练引擎依赖、或更重视与 PyTorch 生态集成的团队。它同样不是“打开就稳”的按钮,wrap 粒度、参数 gather、通信重叠、mixed precision 和 checkpoint state dict 策略都需要联调。
Activation Checkpointing
Activation checkpointing 用重计算换显存:前向时只保存边界激活,反向时局部重算。它与 PP、ZeRO/FSDP、长上下文 attention 和混合精度都耦合。开启 checkpointing 会改变前后向时序、参数 gather 节奏和 pipeline stage 峰值,因此应作为训练拓扑的一部分一起设计,而不是后期临时补一个开关。
四、通信、拓扑与容量预算
分布式训练的实际吞吐常由通信而不是理论 FLOPs 决定。常见通信包括 DP 梯度 AllReduce / Reduce-Scatter、ZeRO/FSDP 参数 AllGather 和状态分片通信、TP 层内 AllReduce / AllGather、PP stage 间点对点传输、EP token dispatch / combine,以及 CP 长上下文 attention 通信。
一个实用原则是:通信越频繁,越应该放在越近的拓扑域内。常见设计是 TP 留在单机 NVLink 域,PP 跨少量节点扩展,DP 在更外层复制,ZeRO/FSDP 在 DP 组内分片。MoE 还要考虑专家放置、热门专家负载和 dispatch 路径。
通信重叠
通信重叠的目标是让 GPU 不要在等待网络时空转。典型手段包括梯度 reduce 与反向计算重叠、参数 gather 与前向计算重叠、TP 通信与 kernel 执行重叠、PP 点对点传输与 micro-batch 调度重叠,以及异步 checkpoint 与训练主链解耦。
但重叠不是无风险收益。它会增加调度复杂度,使 trace 更难读,也可能让失败恢复更复杂。评估通信优化时,应同时看吞吐提升、显存峰值、可调试性和恢复一致性。
设计文档里应有通信预算表
训练启动前建议写一张通信预算表:
| 项目 | 需要估算什么 |
|---|---|
| DP/ZeRO | 每步梯度和状态通信量、bucket 大小、重叠窗口 |
| TP | 每层通信次数、是否跨节点、是否能与 kernel overlap |
| PP | stage 切分、micro-batch 数、bubble 比例、激活传输量 |
| CP | 长序列 attention 通信模式、序列长度扩展后的峰值 |
| EP | token dispatch 量、专家负载均衡、all-to-all 热点 |
| Checkpoint | 保存窗口、后台写入带宽、恢复时间目标 |
这张表的作用不是精确预测每一毫秒,而是提前暴露“方案在什么地方最可能爆”。
五、Checkpoint 应按训练资产设计
很多人把 checkpoint 理解成“权重文件”,这在大规模训练里是不够的。一个可恢复训练状态至少要覆盖模型参数、梯度或梯度累积状态、优化器、学习率调度器、AMP/loss scaler、随机数状态、数据加载进度、sampler 与 packing 状态、全局 step / epoch / consumed tokens、并行拓扑与分片元数据,以及 tokenizer、数据版本、代码版本和关键配置。
缺少其中任何一类,都可能导致“权重恢复成功,但训练轨迹已经不连续”。
Full、Sharded、Async 与 Portable
| 类型 | 优点 | 风险 |
|---|---|---|
| Full checkpoint | 恢复和导出直观 | 保存体积大,落盘慢 |
| Sharded checkpoint | 适配 ZeRO/FSDP,单 rank 压力小 | 依赖 manifest 和拓扑重组 |
| Async checkpoint | 减少训练主链停顿 | 一致性、失败回滚、I/O 峰值更难管 |
| Incremental checkpoint | 节省空间 | 恢复链条复杂,任一环损坏风险高 |
| Portable checkpoint | 便于后训练/推理/评测复用 | 导出成本高,需要格式治理 |
生产系统通常需要双层策略:高频保存 sharded 训练态,用于故障恢复;低频导出 portable/full weights,用于归档、SFT、评测和推理转换。
Manifest 是关键文件
Checkpoint manifest 应像训练资产目录一样记录:每个 shard 属于哪个 rank、哪个并行维度、哪个参数范围,模型、优化器、调度器和数据状态的版本,world size 与 DP/TP/PP/CP/EP 配置,consumed tokens、sampler offset、packing 配置,保存开始和提交完成时间,校验和、文件大小、对象存储路径,以及是否可用于 full weight 导出。
没有 manifest,checkpoint 只是“一堆文件”;有 manifest,才是可恢复、可迁移、可审计的训练资产。
六、恢复、一致性与故障演练
恢复训练最常见的坑不是“文件读不回来”,而是读回来以后状态不一致:数据重复或跳样、学习率调度不连续、梯度累积边界错位、随机数状态改变、loss scaler 重置、拓扑变化后分片映射错误、world size 变化后 batch 语义改变,以及 packing 后的 sample/token 边界恢复不准。
因此 checkpoint 验收不能只看“能 load”。更实用的是短跑一致性验证:从同一个 checkpoint 启动两条短训练,一条按原拓扑恢复,一条按目标恢复路径恢复,比较若干 step 内的 loss、grad norm、参数 checksum、consumed tokens 和关键指标是否一致或在可解释范围内。
World Size 变化恢复
能否在 world size 变化后恢复,是分布式训练成熟度的重要分水岭。真实集群中,节点故障、资源抢占、训练阶段切换和成本优化都可能要求从不同拓扑继续训练。难点在于 sharded state 需要重映射,global batch 语义可能变化,数据顺序也要保持一致。
如果暂时做不到任意 world size 恢复,至少要明确支持矩阵:哪些并行配置可以恢复,哪些只能导出 full weights 后重启,哪些会改变训练轨迹。
异步与对象存储
异步 checkpoint 不是“后台写盘”这么简单。可靠实现至少需要主链快照和后台写入之间有一致性边界,manifest 最后提交以避免半成品被当成可用 checkpoint,后台失败能告警并阻断错误清理,对象存储路径、分片命名和生命周期策略可审计,并且定期做恢复演练。
对象存储 checkpoint 还要考虑 list consistency、跨区域带宽、权限、生命周期、冷热分层和删除策略。它不是把路径从本地盘换成 s3:// 就结束。
七、选型与落地清单
选型时可以先按瓶颈判断,而不是按框架名判断:
| 主要瓶颈 | 优先考虑 |
|---|---|
| 模型副本和优化器状态太大 | ZeRO/FSDP、optimizer state sharding |
| 单层太宽或 GEMM 太大 | TP,尽量放在高速互联域 |
| 层数太深、整模型放不下 | PP,重点设计 stage 和 micro-batch |
| 上下文太长 | CP/SP、activation checkpointing、长上下文 attention kernel |
| MoE 容量扩展 | EP、专家放置、负载均衡与 all-to-all 优化 |
| 保存太慢或故障损失太大 | Async/sharded checkpoint、分层保存、恢复演练 |
| 训练产物要被多阶段复用 | Portable checkpoint、manifest、导出流程 |
训练前验收
正式长跑前至少做一次短跑验收:单步吞吐、MFU、显存峰值要符合预期,各并行维度的 rank mapping 要和物理拓扑一致,通信热点和 pipeline bubble 要能解释,checkpoint 要能保存、列举、校验和恢复,恢复后的 consumed tokens、LR、loss scaler、数据顺序要一致,异步保存失败要能被发现,full/portable 导出要能服务后训练或推理转换,关键配置、代码版本和数据版本也要进入实验记录。
排障顺序
分布式训练出问题时,不建议一开始就改模型。更稳的排查顺序是:先确认数据输入吞吐和 batch/packing 是否稳定,再看单卡显存峰值和 OOM 是否来自参数、激活还是通信 buffer,再看 NCCL、AllReduce、all-to-all、TP/PP 通信热点,然后检查 checkpoint 是否阻塞训练主链,最后再看 loss spike、grad norm、NaN、混合精度状态,并判断是否需要改并行拓扑或训练超参。
最小恢复脚本形态
1 | def load_training_state(path, model, optimizer, scheduler, dataloader_state): |
这段伪代码的重点不是 API,而是恢复顺序:先验证拓扑和 manifest,再恢复模型、优化器、调度器、随机状态和数据进度。只恢复权重不叫续训,只能叫从某个权重重新开始。
- Title: 训练:分布式训练与 Checkpoint
- Author: Charles
- Created at : 2026-02-22 09:00:00
- Updated at : 2026-02-22 09:00:00
- Link: https://charles2530.github.io/2026/02/22/ai-files-training-distributed-training-and-checkpointing/
- License: This work is licensed under CC BY-NC-SA 4.0.