
CUDA_note_2
CUDA编程模型基础
一个超多线程协处理器
当通过CUDA 编译时,GPU 可以被视为能执行非常高数量并行线程的计算设备。它作为主CPU 的一个协处理器。换句话说,运行在主机上的并行数据和高密度计算应用程序部分,被卸载到这个设备上。 更准确地讲,一个被执行许多次不同数据的应用程序部分,可以被分离成为一个有很多不同线程在设备上执行的函数。达到这个效果,这个函数被编译成设备的指令集(kernel 程序),被下载到设备上。 主机和设备使用它们自己的DRAM,主机内存和设备内存。并可以通过利用设备高性能直接内存存取(DMA) 的引擎(API)从一个DRAM 复制数据到其他DRAM。
内存模型
CUDA编程模型是一个异构模型,需要CPU和GPU协同工作。在CUDA中,host和device是两个重要的概念,我们用host指代CPU及其内存,而用device指代GPU及其内存。CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。同时,host与device之间可以进行通信,这样它们之间可以进行数据拷贝。典型的CUDA程序的执行流程如下:
- 分配host内存,并进行数据初始化;
- 分配device内存,并从host将数据拷贝到device上;
- 调用CUDA的核函数在device上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。
上面流程中最重要的一个过程是调用CUDA的核函数来执行并行计算,kernel是CUDA中一个重要的概念,kernel是在device上线程中并行执行的函数,核函数用__global__符号声明,在调用时需要用<<<grid, block>>>来指定kernel要执行的线程数量,在CUDA中,每一个线程都要执行核函数,并且每个线程会分配一个唯一的线程号thread ID,这个ID值可以通过 核函数的内置变量 threadIdx来获得。
由于GPU实际上是异构模型,所以需要区分host和device上的代码,在CUDA中是通过函数类型限定词开区别host和device上的函数,主要的三个函数类型限定词如下:
__global__:在device上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须是void,不支持可变函数参数,不能成为类成员函数。注意用__global__定义的kernel是异步的,这意味着host不会等待kernel执行完就执行下一步。__device__:在device上执行,单仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用,一般省略不写,不可以和__global__同时用,但可和__device__,此时函数会在device和host都编译。
线程批处理
要深刻理解kernel,必须要对kernel的线程层次结构有一个清晰的认识。首先GPU上很多并行化的轻量级线程。kernel在device上执行时实际上是启动很多线程,一个kernel所启动的所有线程称为一个网格(grid),同一个网格上的线程共享相同的全局内存空间,grid是线程结构的第一层次,而网格又可以分为很多线程块(block),一个线程块里面包含很多线程,它通过一些快速的共享内存有效地分享数据并且在制定的内存访问中同步它们的执行,更准确地说,它可以在Kernel 中指定同步点,一个块里的线程被挂起直到它们所有都到达同步点。这是第二个层次。
而线程批处理就是执行一个被组织成许多线程块的kernel。 线程两层组织结构如下图所示,这是一个grid和block均为2-dim的线程组织。grid和block都是定义为dim3类型的变量,dim3可以看成是包含三个无符号整数(x,y,z)成员的结构体变量,在定义时,缺省值初始化为1。因此grid和block可以灵活地定义为1-dim,2-dim以及3-dim结构,对于图中结构(主要水平方向为x轴),定义的grid和block如下所示,kernel在调用时也必须通过执行配置<<<grid, block>>>来指定kernel所使用的线程数及结构。
1 | dim3 grid(3, 2); |
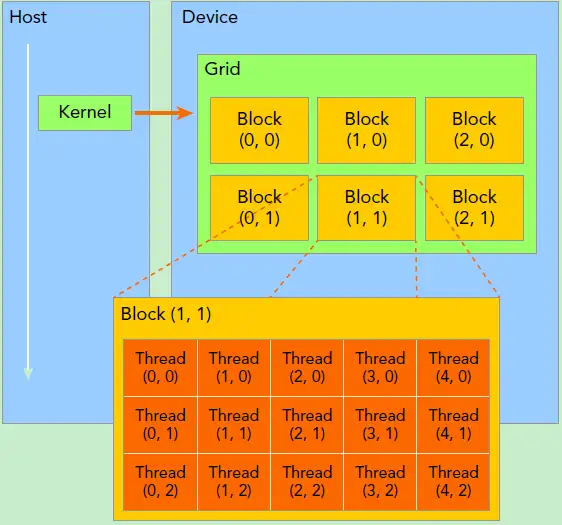
所以,一个线程需要两个内置的坐标变量(blockIdx,threadIdx)来唯一标识,它们都是dim3类型变量,其中blockIdx指明线程所在grid中的位置,而threaIdx指明线程所在block中的位置,如图中的Thread (1,1)满足:
1 | threadIdx.x = 1 |
一个线程块上的线程是放在同一个流式多处理器(SM)上的,但是单个SM的资源有限,这导致线程块中的线程数是有限制的,现代GPUs的线程块可支持的线程数可达1024个。有时候,我们要知道一个线程在block中的全局ID,此时就必须还要知道block的组织结构,这是通过线程的内置变量blockDim来获得。它获取线程块各个维度的大小 。另外线程还有内置变量gridDim,用于获得网格块各个维度的大小。
kernel的这种线程组织结构天然适合vector,matrix等运算,如我们将利用上图2-dim结构实现两个矩阵的加法,每个线程负责处理每个位置的两个元素相加,代码如下所示。线程块大小为(16, 16),然后将N*N大小的矩阵均分为不同的线程块来执行加法运算。
1 | // Kernel定义 |
此外这里简单介绍一下CUDA的内存模型,如下图所示。可以看到,每个线程有自己的私有本地内存(Local Memory),而每个线程块有包含共享内存(Shared Memory),可以被线程块中所有线程共享,其生命周期与线程块一致。此外,所有的线程都可以访问全局内存(Global Memory)。还可以访问一些只读内存块:常量内存(Constant Memory)和纹理内存(Texture Memory)。内存结构涉及到程序优化,这里不深入探讨它们。
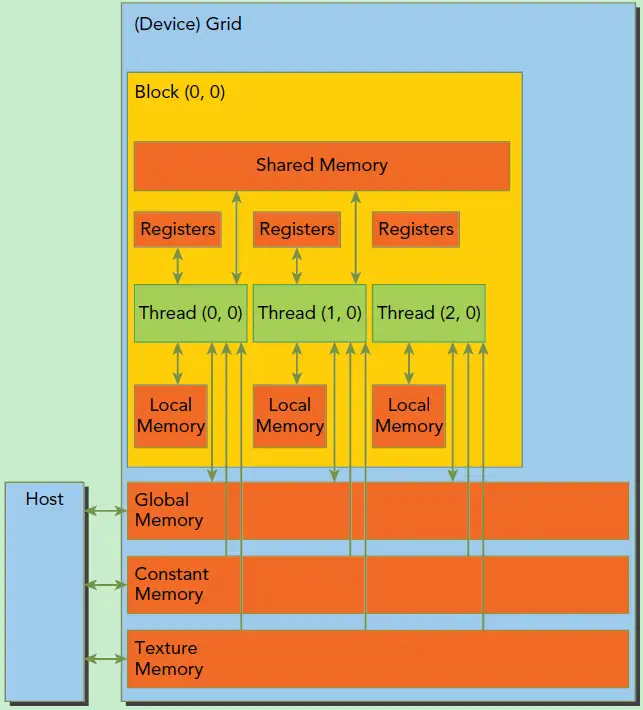
CUDA内存模型
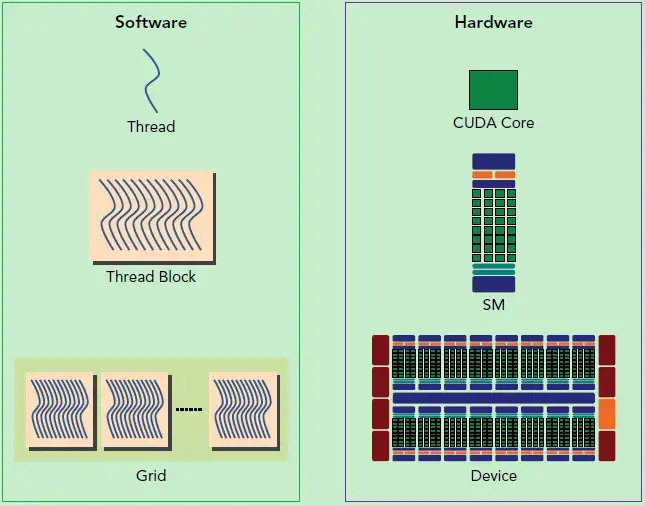
还有重要一点,你需要对GPU的硬件实现有一个基本的认识。上面说到了kernel的线程组织层次,那么一个kernel实际上会启动很多线程,这些线程是逻辑上并行的,但是在物理层却并不一定。这其实和CPU的多线程有类似之处,多线程如果没有多核支持,在物理层也是无法实现并行的。但是好在GPU存在很多CUDA核心,充分利用CUDA核心可以充分发挥GPU的并行计算能力。GPU硬件的一个核心组件是SM,前面已经说过,SM是英文名是 Streaming Multiprocessor,翻译过来就是流式多处理器。SM的核心组件包括CUDA核心,共享内存,寄存器等,SM可以并发地执行数百个线程,并发能力就取决于SM所拥有的资源数。当一个kernel被执行时,它的gird中的线程块被分配到SM上,一个线程块只能在一个SM上被调度。SM一般可以调度多个线程块,这要看SM本身的能力。那么有可能一个kernel的各个线程块被分配多个SM,所以grid只是逻辑层,而SM才是执行的物理层。SM采用的是SIMT (Single-Instruction, Multiple-Thread,单指令多线程)架构,基本的执行单元是线程束(warps),线程束包含32个线程,这些线程同时执行相同的指令,但是每个线程都包含自己的指令地址计数器和寄存器状态,也有自己独立的执行路径。所以尽管线程束中的线程同时从同一程序地址执行,但是可能具有不同的行为,比如遇到了分支结构,一些线程可能进入这个分支,但是另外一些有可能不执行,它们只能死等,因为GPU规定线程束中所有线程在同一周期执行相同的指令,线程束分化会导致性能下降。当线程块被划分到某个SM上时,它将进一步划分为多个线程束,因为这才是SM的基本执行单元,但是一个SM同时并发的线程束数是有限的。这是因为资源限制,SM要为每个线程块分配共享内存,而也要为每个线程束中的线程分配独立的寄存器。所以SM的配置会影响其所支持的线程块和线程束并发数量。总之,就是网格和线程块只是逻辑划分,一个kernel的所有线程其实在物理层是不一定同时并发的。所以kernel的grid和block的配置不同,性能会出现差异,这点是要特别注意的。还有,由于SM的基本执行单元是包含32个线程的线程束,所以block大小一般要设置为32的倍数。
在进行CUDA编程前,可以先检查一下自己的GPU的硬件配置,这样才可以有的放矢,可以通过下面的程序获得GPU的配置属性:
1 | int dev = 0; |
Z示例njk
向量加法实例z
知道了CUDA编程基础,我们就来个简单的实战,利用CUDA编程实现两个向量的加法,在实现之前,先简单介绍一下CUDA编程中内存管理API。首先是在device上分配内存的cudaMalloc函数:
1 | cudaError_t cudaMalloc(void** devPtr, size_t size); |
这个函数和C语言中的malloc类似,但是在device上申请一定字节大小的显存,其中devPtr是指向所分配内存的指针。同时要释放分配的内存使用cudaFree函数,这和C语言中的free函数对应。另外一个重要的函数是负责host和device之间数据通信的cudaMemcpy函数:
1 | cudaError_t cudaMemcpy(void* dst, const void* src, size_t count, cudaMemcpyKind kind) |
其中src指向数据源,而dst是目标区域,count是复制的字节数,其中kind控制复制的方向:cudaMemcpyHostToHost, cudaMemcpyHostToDevice, cudaMemcpyDeviceToHost及cudaMemcpyDeviceToDevice,如cudaMemcpyHostToDevice将host上数据拷贝到device上。
现在我们来实现一个向量加法的实例,这里grid和block都设计为1-dim,首先定义kernel如下:
1 | // 两个向量加法kernel,grid和block均为一维 |
其中stride是整个grid的线程数,有时候向量的元素数很多,这时候可以将在每个线程实现多个元素(元素总数/线程总数)的加法,相当于使用了多个grid来处理,这是一种grid-stride loop 方式,不过下面的例子一个线程只处理一个元素,所以kernel里面的循环是不执行的。下面我们具体实现向量加法:
1 | int main() |
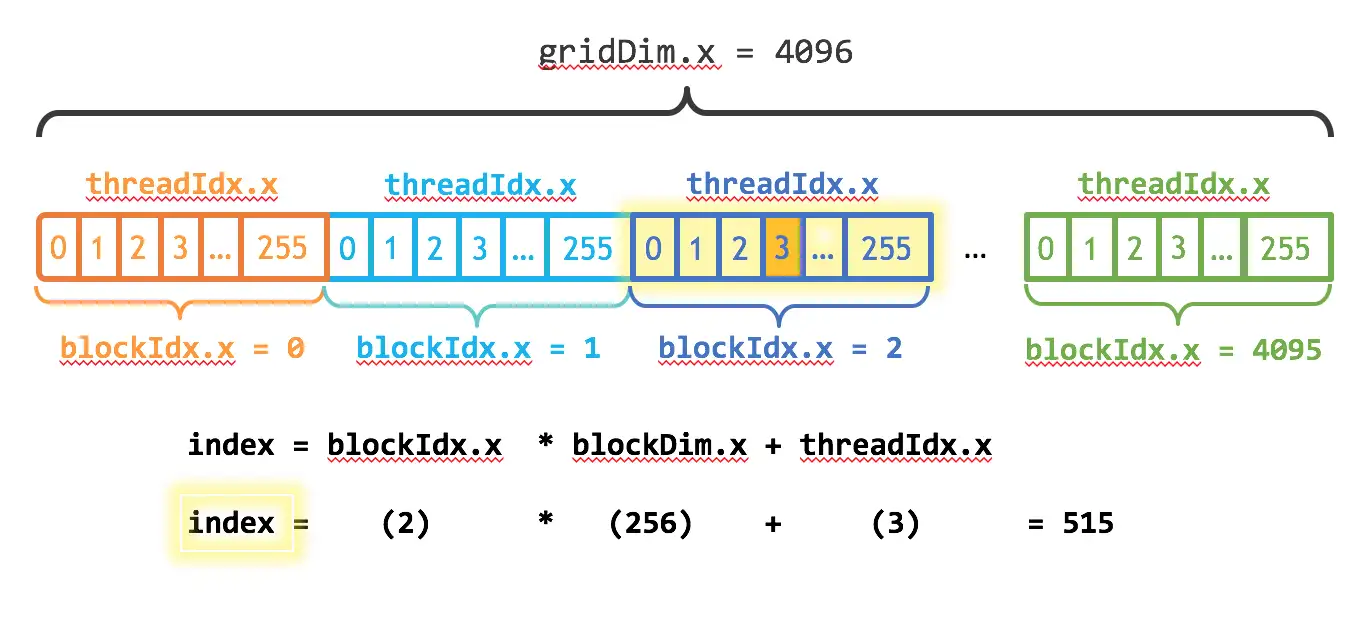
这里我们的向量大小为1<<20,而block大小为256,那么grid大小是4096,kernel的线程层级结构如下图所示:
使用nvprof工具可以分析kernel运行情况,结果如下所示,可以看到kernel函数费时约1.5ms。
1 | nvprof cuda9.exe |
你调整block的大小,对比不同配置下的kernel运行情况,我这里测试的是当block为128时,kernel费时约1.6ms,而block为512时kernel费时约1.7ms,当block为64时,kernel费时约2.3ms。看来不是block越大越好,而要适当选择。
在上面的实现中,我们需要单独在host和device上进行内存分配,并且要进行数据拷贝,这是很容易出错的。好在CUDA 6.0引入统一内存(Unified Memory )来避免这种麻烦,简单来说就是统一内存使用一个托管内存来共同管理host和device中的内存,并且自动在host和device中进行数据传输。CUDA中使用cudaMallocManaged函数分配托管内存:
1 | cudaError_t cudaMallocManaged(void **devPtr, size_t size, unsigned int flag=0); |
利用统一内存,可以将上面的程序简化如下:
1 | int main() |
相比之前的代码,使用统一内存更简洁了,值得注意的是kernel执行是与host异步的,由于托管内存自动进行数据传输,这里要用cudaDeviceSynchronize()函数保证device和host同步 ,这样后面才可以正确访问kernel计算的结果。
矩阵乘法实例
最后我们再实现一个稍微复杂一些的例子,就是两个矩阵的乘法,设输入矩阵为 A 和 B ,要得到 C=A×B 。实现思路是每个线程计算 C的一个元素值$C_{ij}$对于矩阵运算,应该选用grid和block为2-D的。首先定义矩阵的结构体:
1 | // 矩阵类型,行优先,M(row, col) = *(M.elements + row * M.width + col) |
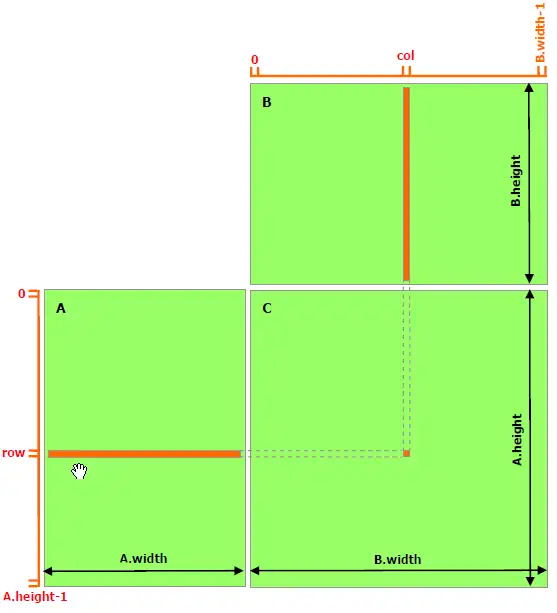
矩阵乘法实现模式
然后实现矩阵乘法的核函数,这里我们定义了两个辅助的__device__函数分别用于获取矩阵的元素值和为矩阵元素赋值,具体代码如下:
1 | // 获取矩阵A的(row, col)元素 |
最后我们采用统一内存编写矩阵相乘的测试实例:
1 | int main() |
这里矩阵大小为,设计的线程的block大小为(32, 32),那么grid大小为(32, 32),最终测试结果如下:
1 | nvprof cuda9.exe |
参考资料
[1]. CUDA编程入门极简教程 - 知乎 (zhihu.com)
[2]. 人工智能编程 | 谭升的博客 (face2ai.com)
[3]. CUDA C++ Programming Guide
- Title: CUDA_note_2
- Author: Charles
- Created at : 2023-07-27 17:10:35
- Updated at : 2024-05-03 09:13:17
- Link: https://charles2530.github.io/2023/07/27/cuda-note-2/
- License: This work is licensed under CC BY-NC-SA 4.0.


