
扩散模型:扩散采样与推理加速
扩散推理的本质,是把训练好的去噪网络当成一个向量场估计器,再沿着这条向量场从噪声走回数据分布。
采样器可以先按“预算怎么花”来理解。Euler 更像低成本快速基线,Heun 用额外模型调用换更平滑的修正,DPM-Solver++ 则更适合作为少步高质量和强 guidance 场景的默认候选。DDPM 原论文的 progressive generation 图能直观看到:采样不是一次完成,而是从噪声逐步形成结构和细节。
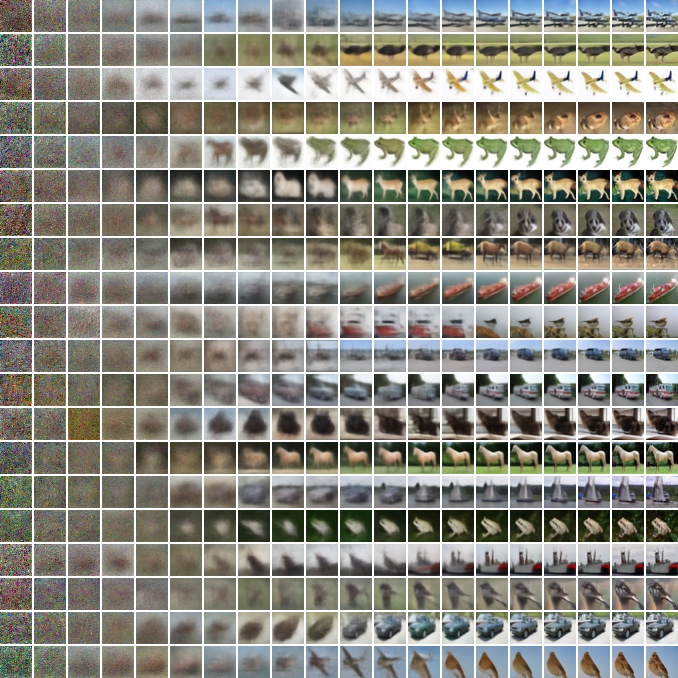
图源:Denoising Diffusion Probabilistic Models,Figure 14。原论文图意:CIFAR-10 unconditional generation 的 progressive generation 过程,展示反向采样链中图像如何从噪声逐步变成可辨认样本。
这张图展示的是同一条反向链上不同时间点的样子:早期主要从噪声里形成粗结构,中后期逐步补边缘、颜色和纹理。它说明“采样步”本来承担逐层成形的职责。采样器不是在提升模型本身的知识,而是在决定同一个去噪网络如何离散求解。实际选型时不要只看单张图效果,应该按步数、guidance、prompt 类型、延迟和失败样本分桶比较。
训练好的扩散网络给出的是“往哪里去噪”的方向估计,采样器决定每一步怎么走、走多远、是否校正。少步采样真正要比较的是速度、质量、稳定性和失败分布。4 步模型如果只在简单 prompt 上好看,却在文字、多人、复杂布局或高 guidance 下明显抖动,工程上未必优于 12 或 20 步方案。
1. 为什么推理会慢
原始 DDPM 往往需要 左右的离散步。若每一步都要跑一次大 UNet,整体时延会很高。
所以采样加速主要在做两件事:
- 用更少的时间点离散同一条轨迹。
- 用更高阶的数值方法减少离散误差。
2. DDIM:把随机链改成确定路径
DDIM 的常见更新可以写成:
当 时,采样变成确定性的。这样做的好处是:
- 同样模型可以跳过很多中间步。
- 轨迹更可控。
- 图像插值和反演更方便。
例子:草图成图
你给模型一张简单线稿和提示词“日落下的海边灯塔”。
- 用很多步时,灯塔、海面、霞光会逐层细化。
- 用 DDIM 减少到 20 或 30 步时,整体结构仍可保住,但一些浪花和云层细节会更依赖模型本身的先验。
3. ODE 视角:采样是数值积分
在连续时间视角下,可以把采样写成 probability flow ODE:
这里 由 score 或噪声预测网络导出。于是采样器就变成了 ODE solver。
ODE 是常微分方程,强调确定性轨迹;SDE 是随机微分方程,轨迹里还包含随机扰动。扩散模型先有连续过程,再把连续过程离散成有限步采样,所以采样器本质上是在控制数值积分误差。
4. Euler:最简单的一阶方法
若把时间离散成 ,Euler 更新写成:
优点:
- 每步只需一次模型调用。
- 实现最简单。
缺点:
- 局部截断误差是一阶,步数太少时容易损细节。
例子:四步速写采样
假设我们只允许 4 步采样一张“蓝色陶瓷杯放在木桌上”的图像:
- 第一步决定大布局,是俯视还是侧视。
- 第二步拉出杯子和桌面的轮廓。
- 第三步补蓝釉反光和阴影。
- 第四步修边缘与背景景深。
Euler 在这种极少步场景下速度很高,但每一步都很“硬”,容易让杯口边缘略粗糙。
5. Heun:预测后再校正
Heun 方法先预测,再修正:
它本质上用两次斜率平均来提升精度。
优点:
- 在同样步数下,常比 Euler 更平滑。
- 中低步数下更容易保住轮廓和细节。
代价:
- 近似每步两次网络调用。
6. DPM-Solver:为 diffusion ODE 定制的高阶解法
DPM-Solver 的思路不是机械套用通用 Runge-Kutta,而是利用扩散 ODE 的特殊结构,把线性项做更准确处理。
可以把它粗略理解为:
其中 不是普通的 Euler 步,而是考虑了噪声日程与网络输出结构的专用更新算子。
这类方法的价值在于:
- 当步数压到 10 到 20 时,仍能保持较高质量。
- 对大型文生图模型尤其有用。
7. DPM-Solver++ 与 guidance
在 classifier-free guidance 下,向量场会更“陡”,数值求解更容易不稳。DPM-Solver++ 通过更适合 guided sampling 的参数化改善这个问题。
工程上可以把这看成:
- 无 guidance 时,求解路径较平缓。
- 高 guidance 时,系统更像高曲率轨迹,低阶方法更容易偏。
DPM-Solver++正是在这种情况下更稳。
8. 如何选
只想快,不想重训
- 先试
DPM-Solver++ - 其次
Euler - 再根据细节需求看
Heun
这一类需求最典型的场景,是你手里已经有一个训练好的扩散模型,希望只改推理栈、不动训练栈。此时应优先选择对现有权重最友好的 solver,而不是一上来就引入蒸馏、Consistency 或一步模型。DPM-Solver++ 往往是默认优先项,因为它在少步和 guidance 场景下通常更稳;Euler 更像一个快速、直接、好调试的基线;Heun 则适合你愿意多付一点计算,去换更平滑的边缘和更稳的中低步质量。
一个很实用的策略是,先固定同一组 prompt、seed 和 guidance,把 Euler、Heun、DPM-Solver++ 在 8 步、12 步、20 步几个延迟桶上拉出速度-质量曲线。这样你看到的不只是“哪个平均更好”,而是同一模型在不同预算下最合适的 solver。
想做交互式预览
- 用很少步的
Euler或DDIM - 先给用户低成本草图
- 再切高质量采样器二次精修
交互式预览的重点并不是一次把终图做到最好,而是尽快给用户一个可判断方向的中间结果。因此预览阶段更看重 TTFT 和整体构图是否对,而不是纹理是否已经打磨完整。少步 Euler 或 DDIM 的价值就在这里:先把主体、构图、色调和大轮廓给出来,让用户尽早决定要不要继续。
这类场景通常适合做两段式工作流。第一段用 4 到 8 步左右的便宜采样快速出草图;第二段只对用户确认后的候选图切到更高质量 solver、更多步数,甚至叠加超分与修复。这样能把总系统成本从“每张图都精修”改成“只有值得的图才精修”。
想做生产级文生图
- 用
DPM-Solver++或同类高阶 solver 作为默认 - 为高 guidance 场景单独做参数搜索
生产级文生图更在意的是稳定收益,而不是偶尔出一张更好的样例图。因此默认 solver 不能只看最好看的展示图,而要看不同 prompt 类型、不同 guidance、不同分辨率和不同 seed 下的整体波动。高阶 solver 往往更适合作为默认路径,是因为它们在少步情况下更容易同时兼顾成本和可接受质量。
此外,生产场景下 guidance 往往不是一个固定值。广告图、写实人像、二次元、logo 或海报的最优 guidance 可能完全不同。更稳的做法是把 solver 和 guidance 一起做桶化配置,而不是假设一组全局参数能覆盖所有流量。
9. 一个直观结论
采样器像不同的开车方式:
Euler像直来直去地快速修正方向。Heun像先试探一下方向,再回头纠偏。DPM-Solver像对道路曲率有更多先验,因此在少量转向中也能更平滑地开到终点。
如果把这个比喻再往工程上落一点,可以把采样器理解成“在相同模型能力下,决定你怎样花推理预算”的执行策略。Euler 更适合做低成本基线和快速预览,Heun 更像在同等步数下争取更稳的折中,DPM-Solver 系列则是在明确追求少步高质量时更像默认主力。真正的设计问题,从来不是哪一个名字更先进,而是你的预算、任务和质量门槛更适合哪种开车方式。
快速代码示例
1 | from diffusers import DiffusionPipeline, DPMSolverMultistepScheduler |
这段代码展示了一个可直接运行的文生图最小推理链路:加载模型后把 scheduler 切到 DPMSolverMultistep,再通过 num_inference_steps 与 guidance_scale 控制速度和条件强度。通常先用 15 到 30 步做首轮调参,再按任务质量要求细化。
工程收束
扩散推理要按采样步数、solver 稳定性、guidance 强度、延迟预算和部署路径一起选型。最容易踩坑的是只追更少步数、忽略质量抖动、把离线单图生成结论外推到交互式系统;更稳的验收方式是记录速度-质量曲线,为不同延迟桶保留多档策略,并固定 prompt 套件、延迟桶和回退门槛。
- Title: 扩散模型:扩散采样与推理加速
- Author: Charles
- Created at : 2025-05-12 09:00:00
- Updated at : 2025-05-12 09:00:00
- Link: https://charles2530.github.io/2025/05/12/ai-files-diffusion-inference/
- License: This work is licensed under CC BY-NC-SA 4.0.