
具身智能:从零路线
这一页是具身智能章节的第一入口。它不是从论文名开始,而是从一个最朴素的任务开始:
这页先回答“具身智能从零路线”在「具身智能」里的位置:它解决什么局部问题,依赖哪些前置,最后会影响哪类工程或研究判断。
前置:先知道 VLA、世界模型、相机/深度和评测集的基本角色。 必要时先回 具身智能入口、基础知识 或 术语表。
主线关系:把感知、数据、仿真、策略、控制、安全和真实闭环连起来,看机器人系统为什么不能只靠离线指标判断。
机器人听到“把红杯放到托盘上”,到底要连续做对哪些事?
它至少要看见杯子和托盘,理解“放到”是一个空间目标,选择抓取方式,输出动作,执行后重新观察,判断杯子是否真的在托盘上。如果杯子滑了、托盘被遮住了、夹爪没夹稳,它还要能停下来、重试或请求帮助。
所以具身智能不是“VLM 接一个机械臂”,而是一条闭环:
1 | 看见世界 -> 理解任务 -> 选择动作 -> 预测后果 -> 执行控制 -> 判断成败 -> 回流数据 |
只要这条链里有一段不稳,机器人就会失败。π0.5、DreamZero、LingBot-World、Dreamer、RoboTwin、cuRobo 这些名字,都是在强化这条链里的不同位置。
先用一张图建立闭环直觉
RT-1 原论文图很适合作为第一张具身智能图:左边是语言和图像历史,中间是 Transformer policy,右边是机器人动作。注意它不是“看图回答问题”,而是每输出一个动作,世界都会变,下一帧观测又会影响后续动作。
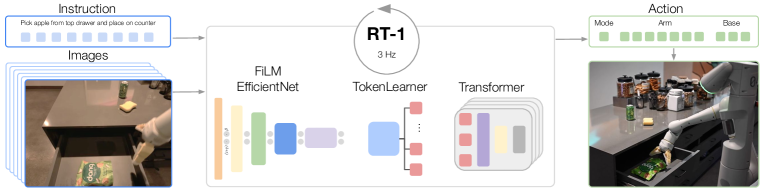
图源:RT-1: Robotics Transformer for Real-World Control at Scale,Figure 1。原论文图意:RT-1 接收自然语言指令和图像历史,经过 tokenization 与 Transformer policy,以约 3Hz 输出机器人动作 token,驱动机械臂完成真实任务。
左侧观测进入模型,右侧动作改变环境,新的图像又回到左侧。这就是具身智能和静态 VLM 的根本差别。静态 VLM 的答案通常停在一句话;具身系统的答案会变成物理动作,并产生新的后果。
普通 VLM / LLM 多数时候回答静态问题:
1 | 输入: 一张图 + 一个问题 |
具身智能回答闭环问题:
1 | 输入: 当前观测 + 机器人状态 + 任务目标 |
因此具身智能最关键的不是“看懂了没有”,而是:
- 看懂以后能不能动;
- 动了以后世界会不会按预期变化;
- 如果变化不对,能不能恢复;
- 如果有危险,能不能停下、降级或拒绝。
七个基本问题
任何具身系统都可以按七个问题拆开。读论文或看项目时,先问它主要解决哪一格。
| 问题 | 初学者理解 | 常见模块 | 论文 / 项目对应 |
|---|---|---|---|
| 我看见了什么 | 图像里有哪些物体,它们在哪里、多大、什么状态 | VLM、检测、分割、深度、pose estimation | 相机、深度与机器人视觉、Depth Anything、VGGT |
| 我现在是什么状态 | 机械臂、夹爪、底盘、历史动作处于什么状态 | proprioception、state estimator、memory | 多相机和机器人本体状态输入 |
| 我要做什么 | 任务目标是什么,下一步子任务是什么 | LLM/VLM planner、high-level policy | π0.5 的 high-level subtask |
| 我能怎么动 | 动作怎么表示,输出几步,交给谁执行 | action token、action chunk、末端位姿、关节角 | ACT、π0.5 的 action expert |
| 做了会怎样 | 执行动作后未来状态、视频、风险会怎样 | world model、WAM、risk model | DreamZero、LingBot-World、Dreamer |
| 能不能安全执行 | 路径是否碰撞,力是否过大,是否越界 | IK、motion planner、MPC、safety filter | SayCan、cuRobo、规划控制页 |
| 成功了吗 | 任务是否达成,失败在哪一步,数据如何回流 | success checker、task progress、benchmark | RoboTwin / 自建任务脚本 |
如果一篇论文没有告诉你它在回答哪一个问题,就很容易读乱。
符号速查:先别怕公式
具身智能公式的作用,通常只是把“谁输入、谁输出、看多远”写清楚。先记住下面这些符号,后面的 VLM、VLA、世界模型和 WAM 就不会散。
| 符号 | 读法 | 初学者理解 | 例子 |
|---|---|---|---|
| time step | 当前时刻 | 第 37 帧、当前控制周期 | |
| observation | 当前传感器观测 | RGB 图像、深度、触觉、关节角读数 | |
| observation history | 到当前为止的观测历史 | 最近几帧图像和动作反馈 | |
| robot state | 机器人本体状态 | 关节角、夹爪开合、底盘速度、末端位姿 | |
| language instruction | 语言目标 | “把红杯放到托盘上” | |
| action | 当前动作 | 末端向前 2 厘米、夹爪闭合 | |
| action chunk | 从现在开始的一小段动作 | 未来 1 秒的连续控制量 | |
| horizon | 往未来看多少步 | 20Hz 控制下, 约等于 1 秒 | |
| policy | 参数为 的策略模型,负责选动作 | VLA policy | |
| probability model | 参数为 的概率模型,负责给未来或输出分布建模 | 世界模型、视频生成模型 | |
| latent state | 模型内部压缩出的世界状态 | 视觉 encoder 或世界模型记忆向量 | |
| reward / progress | 任务收益或进度 | 抓住了、接近目标、完成一个子任务 | |
| cost / risk | 风险或代价 | 碰撞、滑落、越界、用力过大 | |
| done | 任务是否结束 | 成功、失败、超时、中止 |
有的论文用 表示真实状态,有的用 表示 latent state;有的把 写成 horizon,有的把 用作图像高度。读公式时先看符号表,不要只按记忆硬套。
一个最小闭环可以写成:
白话读法是:给定历史观测、机器人状态和语言目标,策略输出未来一小段动作,控制器执行后得到新观测。
这个公式说明了闭环接口;它不说明动作一定安全,也不说明任务一定成功。
四类模型先分清楚
4.1 VLM:看懂当前画面
VLM 主要回答:
| 符号 | 含义 |
|---|---|
| visual input,图像、视频帧或视觉 token | |
| text input,问题、prompt 或类别文本 | |
| 输出,可以是回答、caption、标签或框 | |
| 参数为 的条件生成或分类模型 |
读作什么:给定图像和文本,模型生成一个回答。
红杯例子:输入桌面图和问题“红杯在哪里”,输出“红杯在托盘左侧”。
它不说明什么:这个公式不保证机器人会移动,也不说明夹爪执行后世界会怎样。
4.2 VLA:从视觉语言到动作
VLA 主要回答:
| 符号 | 含义 |
|---|---|
| policy,策略模型 | |
| 当前和历史观测 | |
| 机器人本体状态 | |
| 语言指令 | |
| 未来一小段动作,也叫 action chunk |
读作什么:策略根据看见的东西、机器人自身状态和语言目标,输出接下来一段动作。
红杯例子:模型输出“末端靠近红杯、夹爪闭合、抬起一点”的连续动作块。
它不说明什么:VLA 直接给动作,但不一定显式比较“如果这样做会不会撞、会不会滑、未来是否更好”。
ACT 这张图能帮助理解 action chunk:策略不是每次只吐一个动作点,而是生成一段短动作序列,并在执行时用 temporal ensembling 等方式平滑。
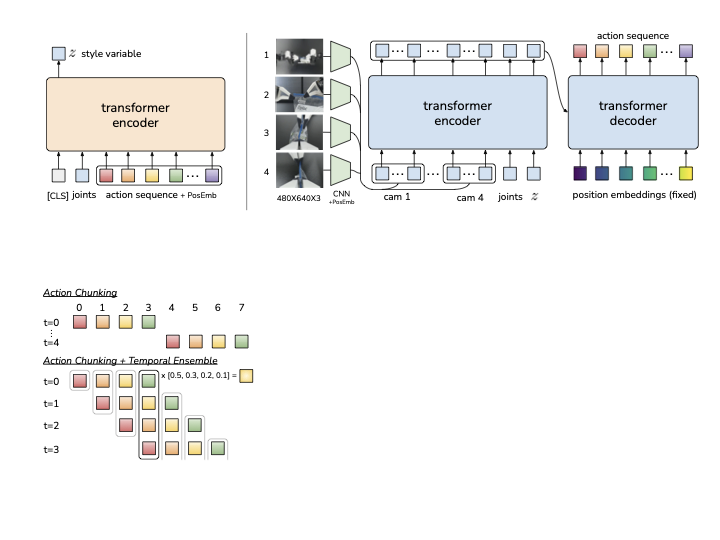
图源:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware,Figure 2。原论文图意:Action Chunking with Transformers (ACT) 用 CVAE 编码动作序列和关节观测,测试时根据多视角图像、关节状态和 latent 生成一段 action sequence,并用 temporal ensembling 平滑执行。
看这张图时先找 action sequence。chunk 的价值是保留短时技能结构、减少逐帧抖动;风险是如果第二步已经错了,后面几步可能会继续错。所以真实系统仍要滚动重规划,而不是一次性输出整段任务。
4.3 世界模型:预测动作后果
世界模型主要回答:
| 符号 | 含义 |
|---|---|
| 当前 latent state,模型内部世界状态 | |
| 候选动作序列 | |
| 未来任务收益或进度 | |
| 未来风险或代价 | |
| 是否结束、失败或中止 |
读作什么:如果从当前状态执行这一段动作,模型预测未来会怎样、收益如何、风险如何、是否结束。
红杯例子:如果快速从侧面推红杯,世界模型应该预测滑落或碰撞风险更高;如果从上方夹取并慢速移动,风险更低。
它不说明什么:未来预测不是执行保证。真实系统仍要用控制器、安全层和重新观测来纠错。
4.4 WAM:同时预测未来和动作
WAM,也就是 World Action Model,主要回答:
| 符号 | 含义 |
|---|---|
| 未来观测,可以是视频帧或 latent | |
| 与未来观测对应的动作 chunk | |
| 联合建模未来世界和未来动作 |
读作什么:模型一边想象未来画面,一边给出导致这个未来的动作。
红杯例子:模型生成“夹起红杯并移动到托盘上方”的未来视频,同时输出对应动作。
它不说明什么:如果未来视频错了,动作也可能很一致地沿着错误未来走。因此 WAM 尤其需要真实观测刷新、risk checker 和 safety filter。
DreamZero 这条路线正是把未来视频和未来动作绑在一起。
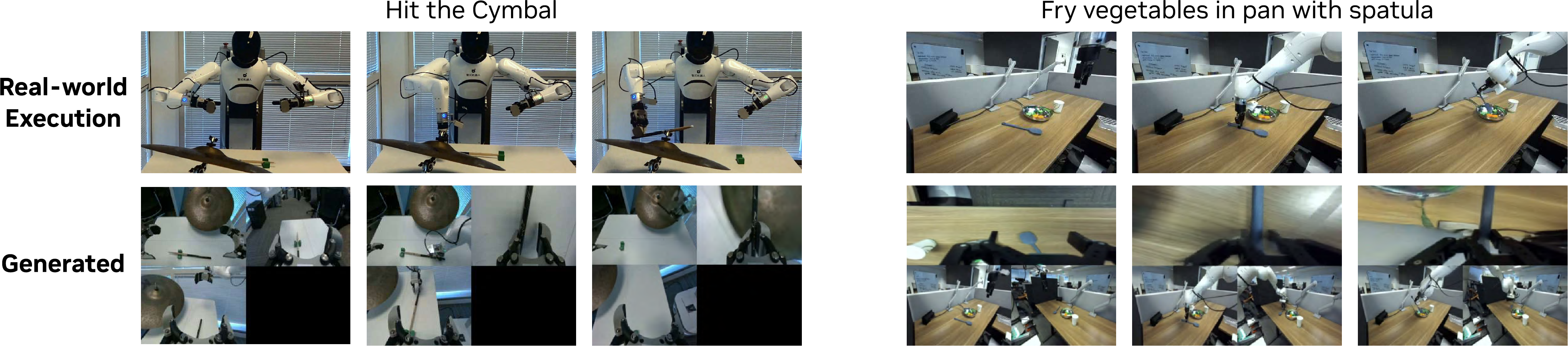
图源:DreamZero,Figure 2。原论文图意:WAM 把未来视觉和未来动作放在同一生成过程中,使动作必须和未来视觉变化对齐。
这张图不要只看未来视频是否清晰,而要看动作和视频是否互相解释。动作说“夹起杯子”,未来画面就应该出现杯子被夹起;如果画面没有变化或变化与动作无关,说明模型没有真正学到 action-conditioned future。
π0.5:把长任务分成高层语义和低层动作
π0.5 适合作为 VLA 入门论文。它面对的不是单个桌面抓取,而是“clean the kitchen”“clean the bedroom”这类开放世界长任务。
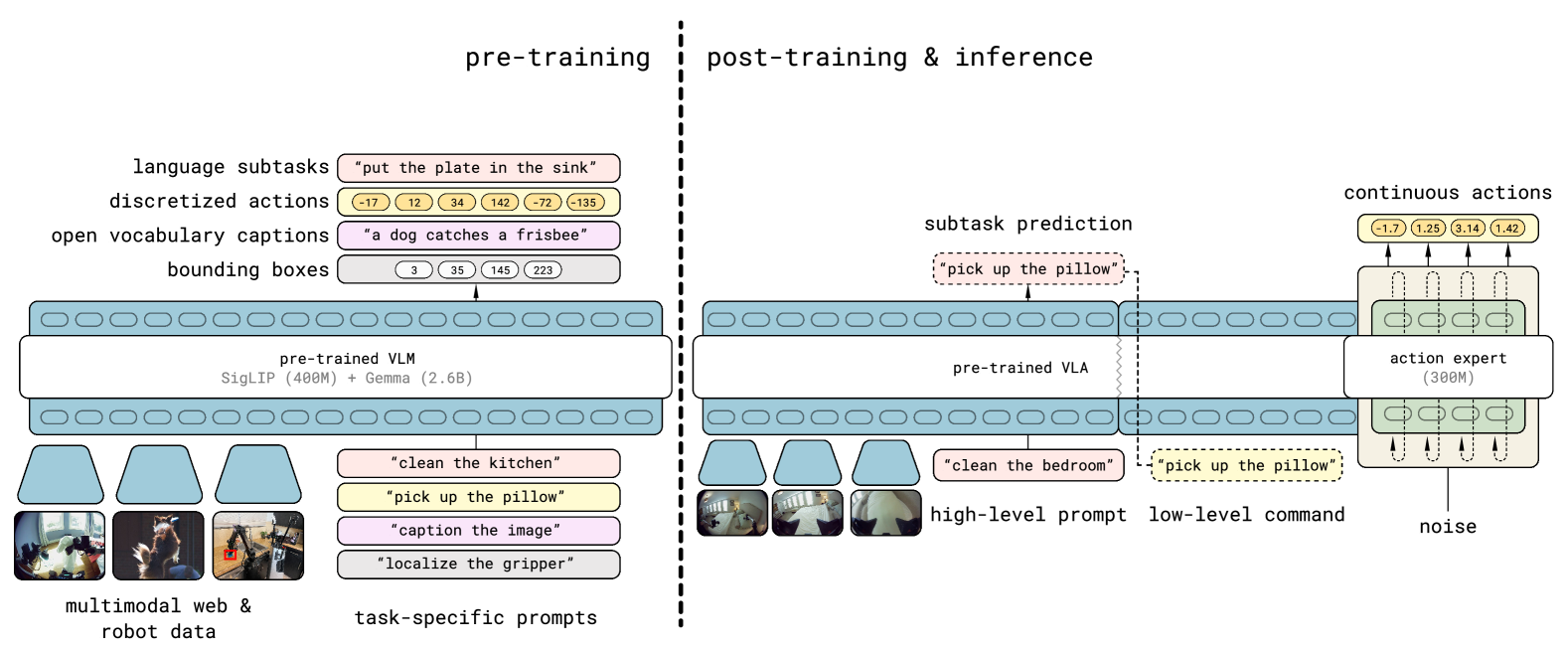
图源:π0.5,Figure 3。原论文图意:π0.5 同一个 VLA 系统先预测 high-level subtask,再由 action expert 输出低层连续动作,从而把长任务语义和机器人控制接起来。
图中 high-level subtask 负责回答“下一步语义上做什么”,action expert 负责回答“身体怎么动”。这两个问题不能混成一个词。一个模型可能知道该拿盘子,但不会稳定抓;也可能能抓盘子,但不知道清理厨房下一步该处理什么。
π0.5 可以记成三句话:
- 它解决开放世界长任务,需要高层子任务来跟踪进度;
- 它把动作分成 high-level subtask 和低层连续 action chunk;
- 它依赖异构数据,包括 web 多模态数据、跨机器人数据、移动操作数据、高层子任务和 verbal instruction。
所以 π0.5 的核心启发是:VLA 不是只收更多动作轨迹,而是要把语义、任务分解和动作控制放进同一个训练体系。
DreamZero:让动作和未来画面互相约束
DreamZero 适合理解 WAM。它的关键循环是:
1 | 当前图像 + 语言 + 机器人状态 |

图源:DreamZero,Figure 1。原论文图意:从多源机器人数据训练 world-action model,使模型在执行时同时产生未来视觉和动作,并用真实观测持续闭环刷新。
第一条线是视觉上下文从哪里来,第二条线是动作 chunk 如何生成,第三条线是真实观测如何回写。没有第三条线,模型会长期活在自己生成的未来里,错误会越滚越大。
DreamZero 和 π0.5 的差别可以压成一张表:
| 问题 | π0.5 | DreamZero |
|---|---|---|
| 主要目标 | 从视觉语言输出动作 | 同时生成未来视频和未来动作 |
| 强调什么 | 高层子任务 + 连续 action chunk | video-action alignment |
| 典型风险 | 子任务错、动作执行错 | 未来视频错,动作也跟着错 |
| 系统需求 | 控制、安全、success checker | 实时推理、真实观测刷新、安全层 |
读 DreamZero 时要抓住一个矛盾:它让模型学会“动作导致什么视觉变化”,这很强;但如果未来视频预测错,它可能会非常一致地执行错误计划。因此 WAM 不能绕过安全层。
为什么还需要 planner、controller 和 safety filter
模型输出动作后,真实机器人通常还要经过一层或多层执行接口:
planner 负责找路径或技能序列,controller 负责高频跟踪和动力学约束,safety filter 负责速度、力、碰撞、工作空间和急停边界。
SayCan 的图很适合解释“会说”和“能做”的区别。LLM 给候选技能打“是否符合指令”的分数,affordance / value function 给技能打“当前能否执行”的分数,二者组合后才选下一步。
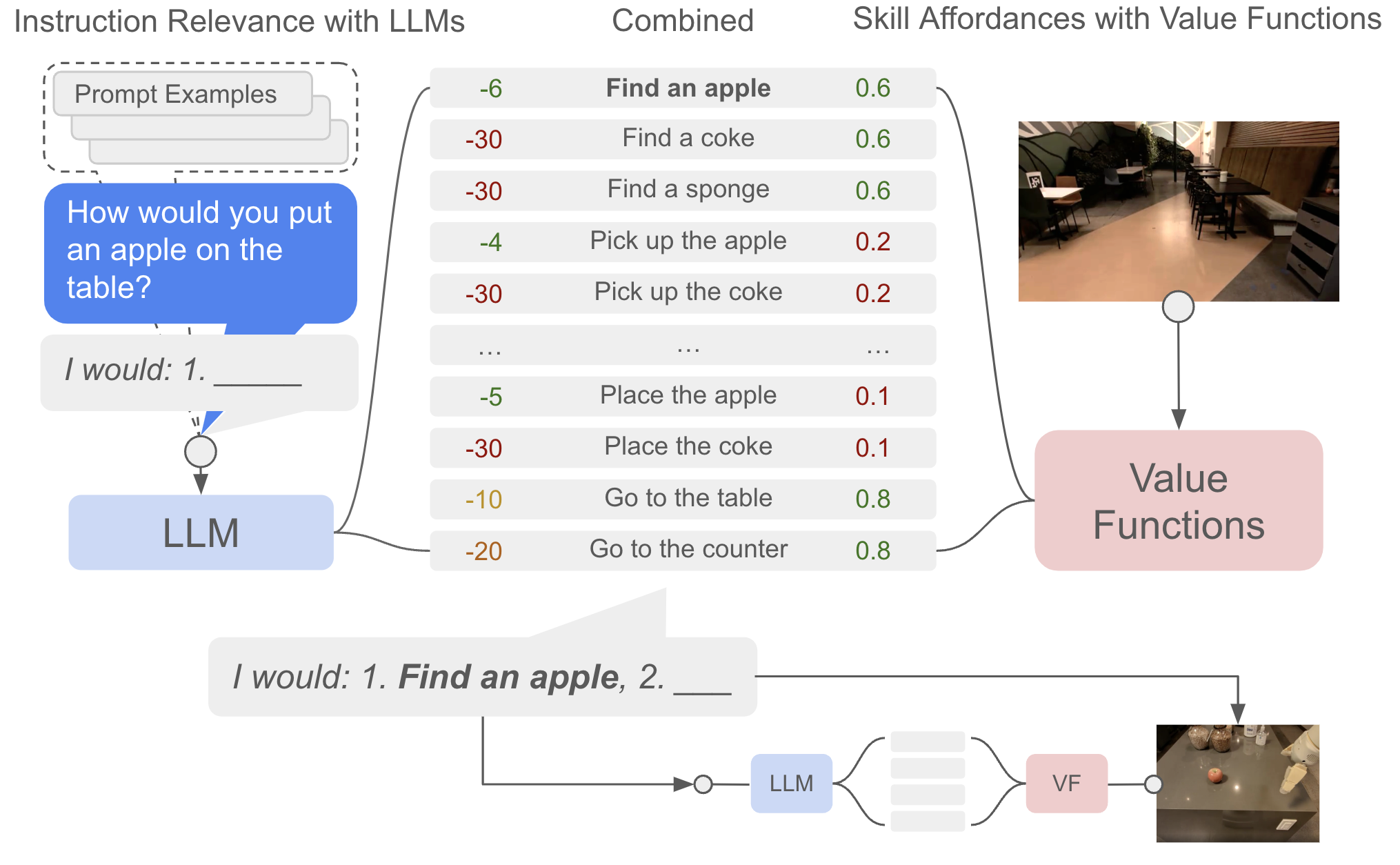
图源:Do As I Can, Not As I Say: Grounding Language in Robotic Affordances,Figure 3。原论文图意:LLM 给候选技能打“是否符合指令”的分数,value functions 给技能打“当前环境是否可执行”的 affordance 分数,二者组合后选择下一步机器人动作。
左边语言模型更像“这个动作对任务有没有用”,右边 affordance 更像“这个动作在当前环境能不能做”。真实机器人需要两者相乘或共同约束:只 useful 可能会撞,只 possible 可能和任务无关。
数据和评测:闭环能不能进步
具身智能的数据不是一堆图片,也不是一堆孤立动作。它应该能回放一条 episode:
1 | instruction |
Open X-Embodiment 这张图提醒我们:跨机器人、跨场景、跨任务的数据非常异质。不同机器人有不同相机、动作空间、夹爪、控制频率和任务分布。
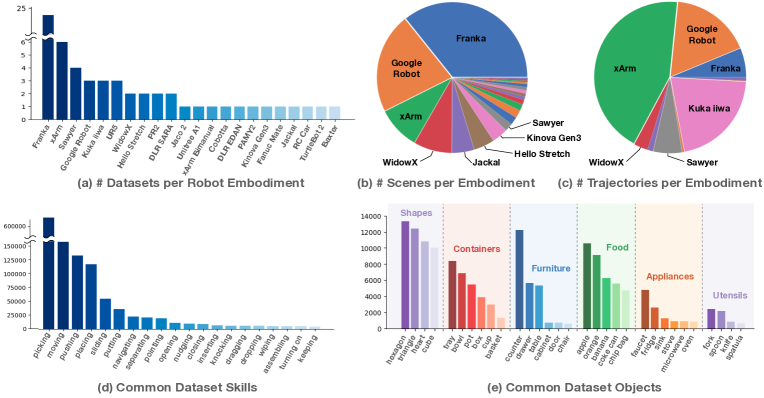
图源:Open X-Embodiment: Robotic Learning Datasets and RT-X Models,Figure 1。原论文图意:统计 Open X-Embodiment 中不同 robot embodiment、scene、trajectory、skill 和 object category 的分布,展示跨机器人数据的异质性。
这张图的重点不是“数据量大”,而是“数据来源很不一样”。VLA / WAM 要泛化,必须处理跨 embodiment、跨相机、跨动作空间的数据契约;否则模型可能只在某个固定实验室里成功。
一个最小可用数据管线可以写成:
1 | 3D 资产 -> 物理属性 -> 抓取候选 -> 场景布置 |
这里 success checker 很关键。它定义“什么叫成功”,也决定失败样本能不能被统计和回流。没有 success checker,模型训练出来也很难解释。
一个任务贯穿所有概念
以“把圆柱体放入尺寸匹配的罐子”为例:
| 阶段 | 输入 | 输出 | 容易失败在哪里 |
|---|---|---|---|
| 看见 | :多视角图像、深度、机器人状态 | 物体位置、尺寸、候选容器 | 深度错、遮挡、尺度不准 |
| 理解 | :任务语言 + 当前状态 | 目标圆柱和目标罐子 | 尺寸比较错、对象绑定错 |
| 选择动作 | 抓取姿态不稳、动作过长 | ||
| 预测后果 | 未来状态、、、 | 低估滑落或碰撞 | |
| 执行控制 | action chunk + 安全约束 | 真实机器人命令 | IK 无解、碰撞、力过大 |
| 判断成败 | 新观测 + 状态 | success / failure / progress | checker 阈值错、状态不同步 |
| 回流数据 | 失败 episode | hard case、纠正轨迹 | 没有失败标签,无法改进 |
这就是具身智能的完整闭环。下一页建议读 VLA、WAM 与世界模型地图,它会把这些模块的边界讲清楚;再读 一个任务跑通具身闭环,用同一套符号把任务走完整。
推荐学习顺序
如果你现在还觉得散,按这个顺序读:
- 本页:先建立闭环、符号和四类模型。
- 相机、深度与机器人视觉:弄清单目、双目、RGB-D、内参、外参和点云。
- VLA、WAM 与世界模型地图:把 VLA、world model、WAM、planner、controller 和数据引擎放到同一张系统图里。
- 一个任务跑通具身闭环:用具体任务把输入、输出、checker 和失败排查串起来。
- 资产到轨迹:感知、抓取与数据管线:理解训练数据从哪里来。
- 规划、控制与安全:理解为什么模型输出动作后还要接 planner、controller 和 safety filter。
- π0.5:理解 VLA 如何做开放世界长任务。
- DreamZero:理解 WAM 如何把未来视频和动作绑在一起。
- LingBot-World:理解视频生成模型如何变成交互世界模拟器。
检查标准
读完这一组页面后,你应该能回答:
- 、、、、、、、、 分别是什么?
- VLM、VLA、world model、WAM 的区别是什么?
- action chunk 为什么不是完整 trajectory?
- π0.5 为什么需要 high-level subtask?
- DreamZero 为什么要同时生成视频和动作?
- 为什么模型输出动作后仍要经过 planner、controller 和 safety filter?
- 为什么 success checker 和失败回流要比大规模生成轨迹更早设计?
如果这些问题都能答清楚,具身智能的主线就立住了。
- 回到本专题入口:具身智能,确认这页在整条路线中的位置。
- 按导航顺序继续:VLA 数据、模型与评测路线。
- 概念或符号卡住时,先查 术语表,再回到当前页。
- Title: 具身智能:从零路线
- Author: Charles
- Created at : 2025-05-23 09:00:00
- Updated at : 2025-05-23 09:00:00
- Link: https://charles2530.github.io/2025/05/23/ai-files-embodied-ai-beginner-learning-path/
- License: This work is licensed under CC BY-NC-SA 4.0.