
具身智能:从零路线
这一页是具身智能章节的第一入口。它不从论文名开始,而是从一个更朴素的问题开始:
机器人要在真实世界完成任务,到底需要哪些能力?
答案不是“一个更大的模型”,而是一条闭环:
1 | 看见世界 -> 理解任务 -> 选择动作 -> 预测后果 -> 执行控制 -> 判断成败 -> 回流数据 |
只要这条链里有一段不稳,系统都会失败。π0.5、DreamZero、LingBot-World、Dreamer、RoboTwin、cuRobo 这些名字,都是在强化这条链里的不同位置。
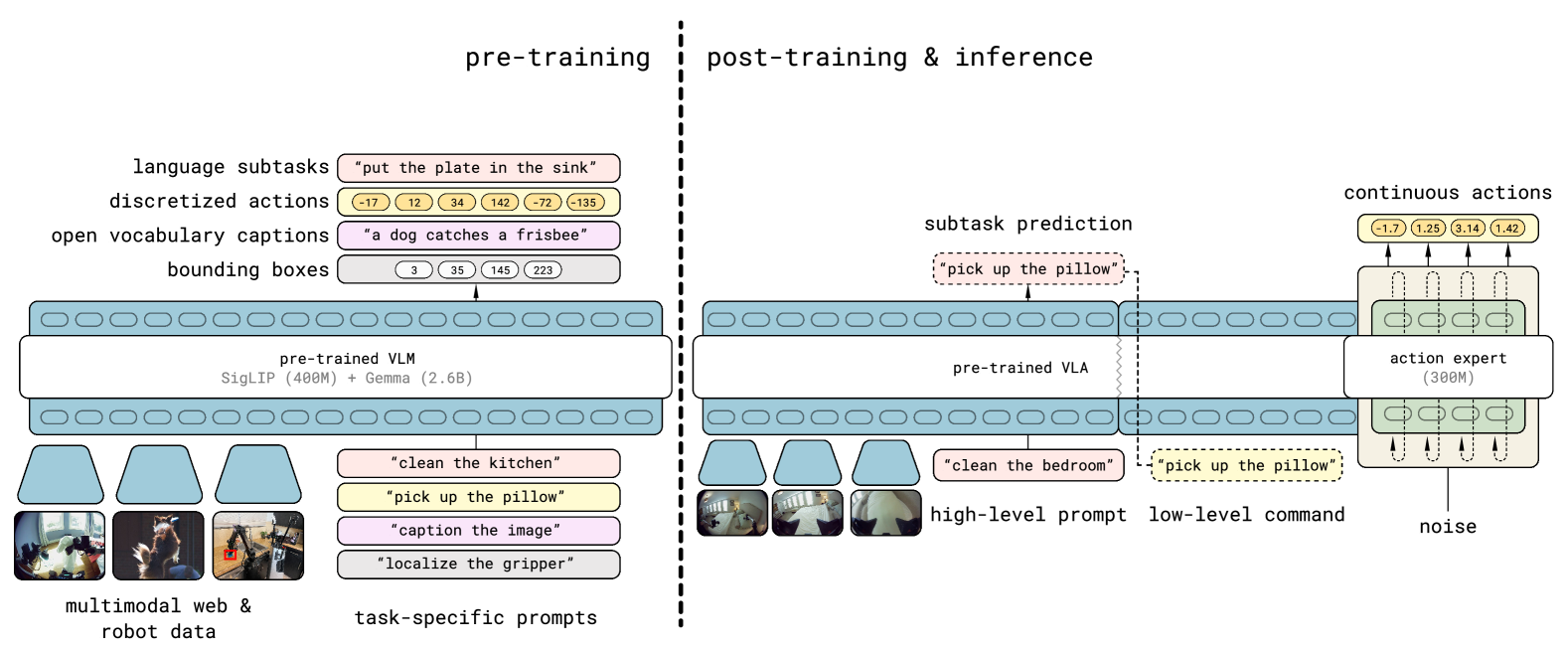
图源:π0.5,Figure 3。原论文图意:π0.5 同一个 VLA 系统先预测 high-level subtask,再由 action expert 输出低层连续动作,从而把长任务语义和机器人控制接起来。
这张图能把“具身智能不是一个模型名”讲清楚:上半部分像任务理解,回答下一步语义上该做什么;下半部分像身体控制,回答机器人关节和夹爪怎么动。学习具身智能时,先把“任务分解”和“动作执行”分开,再看世界模型、planner 和数据引擎分别补哪一层。
1. 先记住一个核心差别:静态智能 vs 具身智能
普通 VLM / LLM 多数时候回答的是静态问题:
1 | 输入: 一张图 + 一个问题 |
具身智能回答的是闭环问题:
1 | 输入: 当前观测 + 机器人状态 + 任务目标 |
所以具身智能最关键的不是“看懂了没有”,而是:
- 看懂以后能不能动;
- 动了以后世界会不会按预期变化;
- 如果变化不对,能不能恢复;
- 如果有危险,能不能停下或拒绝。
这就是为什么具身智能一定会同时涉及视觉、语言、动作、物理、控制、安全和数据回流。
2. 六个基本问题
任何具身系统都可以按六个问题拆开:
| 问题 | 初学者理解 | 典型模块 | 论文 / 项目对应 |
|---|---|---|---|
| 我看见了什么 | 图像里有哪些物体、它们在哪里、多大、什么状态 | VLM、检测、分割、pose estimation、RGB-D | 相机、深度与机器人视觉、资产/感知管线 |
| 我要做什么 | 任务目标是什么,下一步子任务是什么 | LLM/VLM planner、high-level policy | π0.5 的 high-level subtask |
| 我能怎么动 | 动作怎么表示,输出几步,给哪个控制器 | action token、action chunk、末端位姿、关节角 | π0.5 的 FAST + flow action expert |
| 做了会怎样 | 执行动作后未来状态、视频、风险会怎样 | world model、WAM、risk model | DreamZero、LingBot-World、Dreamer |
| 能不能安全执行 | 路径是否碰撞,力是否过大,是否越界 | IK、cuRobo、STOMP、MPC、safety filter | 规划控制页 |
| 成功了吗 | 任务是否达成,失败在哪一步 | success checker、task progress、benchmark | RoboTwin / 自建任务脚本 |
如果一篇论文没有告诉你它在回答哪一个问题,就很容易读乱。
3. 四类模型先分清楚
VLM:看懂当前画面
VLM 主要回答:
它能识别物体、关系、文字、场景语义。但 VLM 本身不一定能控制机器人,因为它通常不输出连续动作,也不处理执行后的物理后果。
VLA:从视觉语言到动作
VLA 主要回答:
它输入视觉、机器人状态和语言,输出未来一小段动作。π0.5 就是这条路线的代表:先预测高层子任务,再用 action expert 输出连续动作块。
世界模型:预测动作后果
世界模型主要回答:
它的核心是 what-if:如果执行这个动作,未来会怎样。LingBot-World 是偏视频世界模拟器的路线,Dreamer 是偏 latent dynamics + RL 的路线。
WAM:同时预测未来和动作
WAM 主要回答:
DreamZero 是这条路线的代表。它把未来视频和未来动作一起生成,让动作必须和未来视觉变化对齐。这样它比普通世界模型更接近 policy,也比普通 VLA 更强调动作后果。
4. π0.5 应该怎么读
π0.5 最适合作为 VLA 入门论文。读它时不要先陷进模型细节,先抓住三件事。
第一,它解决的是开放世界长任务
普通桌面 VLA 可能是:
1 | pick up the red cube |
π0.5 面对的是:
1 | clean the kitchen |
这类任务要持续几分钟,需要机器人自己判断下一步该处理什么对象。所以 π0.5 不只是输出动作,还要输出 high-level subtask。
第二,它把动作分成两个层级
1 | high-level subtask: pick up the plate |
这个分层很重要。高层子任务解决“语义上该做什么”,action chunk 解决“身体怎么动”。一个模型如果只会动作,但不知道下一步该处理哪个对象,长任务会乱;如果只会任务分解,但动作不稳,也无法落地。
第三,它依赖异构数据
π0.5 不只靠目标机器人自己的数据,而是混合:
- web 多模态数据:提供开放世界物体和场景知识;
- 跨机器人数据:提供更多低层操作先验;
- 移动操作数据:贴近目标机器人;
- high-level subtask:训练任务分解;
- verbal instruction:让人类像教新员工一样指导机器人。
所以 π0.5 的核心启发是:VLA 不是只收更多动作轨迹,而是要把语义、任务分解和动作控制放进同一个训练体系。
5. DreamZero 应该怎么读
DreamZero 最适合理解 WAM。它和 π0.5 的区别是:
| 问题 | π0.5 | DreamZero |
|---|---|---|
| 主要目标 | 从视觉语言输出动作 | 同时生成未来视频和未来动作 |
| 强调什么 | 高层子任务 + 连续 action chunk | video-action alignment |
| 典型风险 | 长任务子任务错、动作执行错 | 未来视频错,动作也跟着错 |
| 系统需求 | 控制、安全、success checker | 实时推理、真实观测刷新、安全层 |
DreamZero 的关键循环是:
1 | 当前图像 + 语言 + 机器人状态 |

图源:DreamZero,Figure 1。原论文图意:从多源机器人数据训练 world-action model,使模型在执行时同时产生未来视觉和动作,并用真实观测持续闭环刷新。
普通 VLA 更像“看一眼,给动作”;DreamZero 让模型同时想象动作会导致怎样的未来。读这张图时关注三条线:视觉上下文从哪里来,动作 chunk 如何生成,真实观测如何回写。没有第三条线,模型会被自己的错误未来带偏。
读 DreamZero 时要抓住一个矛盾:它让模型学会“动作导致什么视觉变化”,这很强;但如果未来视频预测错,它可能会非常一致地执行错误计划。因此 WAM 不能绕过安全层。
6. LingBot-World 和 Dreamer 放在哪里
LingBot-World 和 Dreamer 都是世界模型,但用途不同:
| 系统 | 世界模型输出 | 主要用途 |
|---|---|---|
| LingBot-World | 动作条件未来视频 | 交互模拟、反事实视频、数据生成 |
| Dreamer | latent state、reward、continue | 在想象中训练策略 |
| DreamZero | 未来视频 + 未来动作 | WAM 直接作为 policy |
所以世界模型不等于“视频生成”。真正要问的是:它预测的未来有没有被用于决策、风险评估、训练或数据回流。
7. 仿真 pipeline 应该放在哪里
项目中的资产与轨迹数据链可以抽象为:
1 | 3D 资产 -> 物理属性 -> 抓取轴 -> 场景 -> success checker -> 轨迹 GT |
它是具身智能的数据底座。
| 工作项 | 支撑什么能力 |
|---|---|
| 资产和纹理 | 让视觉模型看到不同物体和尺度 |
| 物理属性 | 让仿真接触、质量和摩擦更接近真实 |
| 抓取轴 | 给 planner 和策略提供可执行抓取候选 |
| 场景布置 | 生成 clean / random 训练和评测分布 |
| success checker | 自动判断轨迹是否可用 |
| 轨迹 GT | 给 VLA 做行为克隆,给 WAM 做 video-action 对齐 |
这条 pipeline 不是“传统方法”,也不是和 π0.5 / DreamZero 脱节。前沿 VLA 和 WAM 都需要可靠数据。没有资产、状态、动作和成功判定,模型训练出来也很难解释。
如果需要区分 Isaac Sim、RoboTwin、cuRobo 在这条 pipeline 里分别承担什么,读 Isaac Sim 与 RoboTwin 仿真数据链。那一页把仿真世界、任务组织、轨迹规划和自动判定拆开解释。
8. 一个任务贯穿所有概念
以“把圆柱体放入尺寸匹配的罐子”为例:
1 | 看见: 圆柱体和多个罐子 |
这就是具身智能的完整闭环。你可以用 一个任务跑通具身闭环 把这条链详细走一遍。
如果你对“机器人怎么知道物体有多远、多大、在 3D 空间哪里”还不清楚,先读 相机、深度与机器人视觉。那一页用图解释单目、双目、RGB-D、深度图、点云、腕部相机和固定相机。
9. 推荐学习顺序
如果你现在还觉得散,按这个顺序读:
- 本页:先建立最小概念框架。
- 相机、深度与机器人视觉:先弄清单目、双目、RGB-D 和机器人相机长什么样。
- Isaac Sim 与 RoboTwin:理解仿真、任务组织、轨迹规划和数据生成工具链。
- VLA、WAM 与世界模型地图:把 π0.5、DreamZero、LingBot-World 放到同一张图里。
- 一个任务跑通具身闭环:用具体任务把概念串起来。
- 资产到轨迹:感知、抓取与数据管线:理解项目 pipeline 每一步在做什么。
- 规划、控制与安全:理解为什么模型输出动作后还要接控制和 safety filter。
- π0.5:理解 VLA 如何做开放世界长任务。
- DreamZero:理解 WAM 如何把未来视频和动作绑在一起。
- LingBot-World:理解视频生成模型如何变成交互世界模拟器。
10. 读懂的检查标准
读完这一组页面后,你应该能回答:
- VLM、VLA、world model、WAM 的区别是什么?
- π0.5 为什么需要 high-level subtask?
- DreamZero 为什么要同时生成视频和动作?
- 为什么 success checker 要比大规模生成轨迹更早写?
- 为什么 action chunk 不是完整 trajectory?
- 为什么模型输出动作后仍要经过 planner、controller 和 safety filter?
- 资产/轨迹 pipeline 能给 VLA、WAM 和传统 planner 分别提供什么?
如果这七个问题都能答清楚,具身智能这部分的主线就基本建立起来了。
- Title: 具身智能:从零路线
- Author: Charles
- Created at : 2025-05-27 09:00:00
- Updated at : 2025-05-27 09:00:00
- Link: https://charles2530.github.io/2025/05/27/ai-files-embodied-ai-beginner-learning-path/
- License: This work is licensed under CC BY-NC-SA 4.0.