
具身智能:相机、深度与机器人视觉
这一页补一个很基础但很关键的直觉:机器人看到的“图像”并不天然等于 3D 世界。不同相机给机器人的信息不同,能不能估计距离、能不能恢复物体尺寸、能不能抓取,取决于传感器和标定。
先记住一句话:
1 | 单目相机主要给 2D 图像;双目/RGB-D 才更直接给 3D 距离。 |
这不是说单目完全不能估深度,而是说单张单目图像本身没有可靠的绝对尺度。它需要额外假设、运动、多帧、已知物体尺寸或学习到的先验。
1. 相机在机器人上大概长什么样
机器人上常见相机不是一种形态,而是几类安装方式:
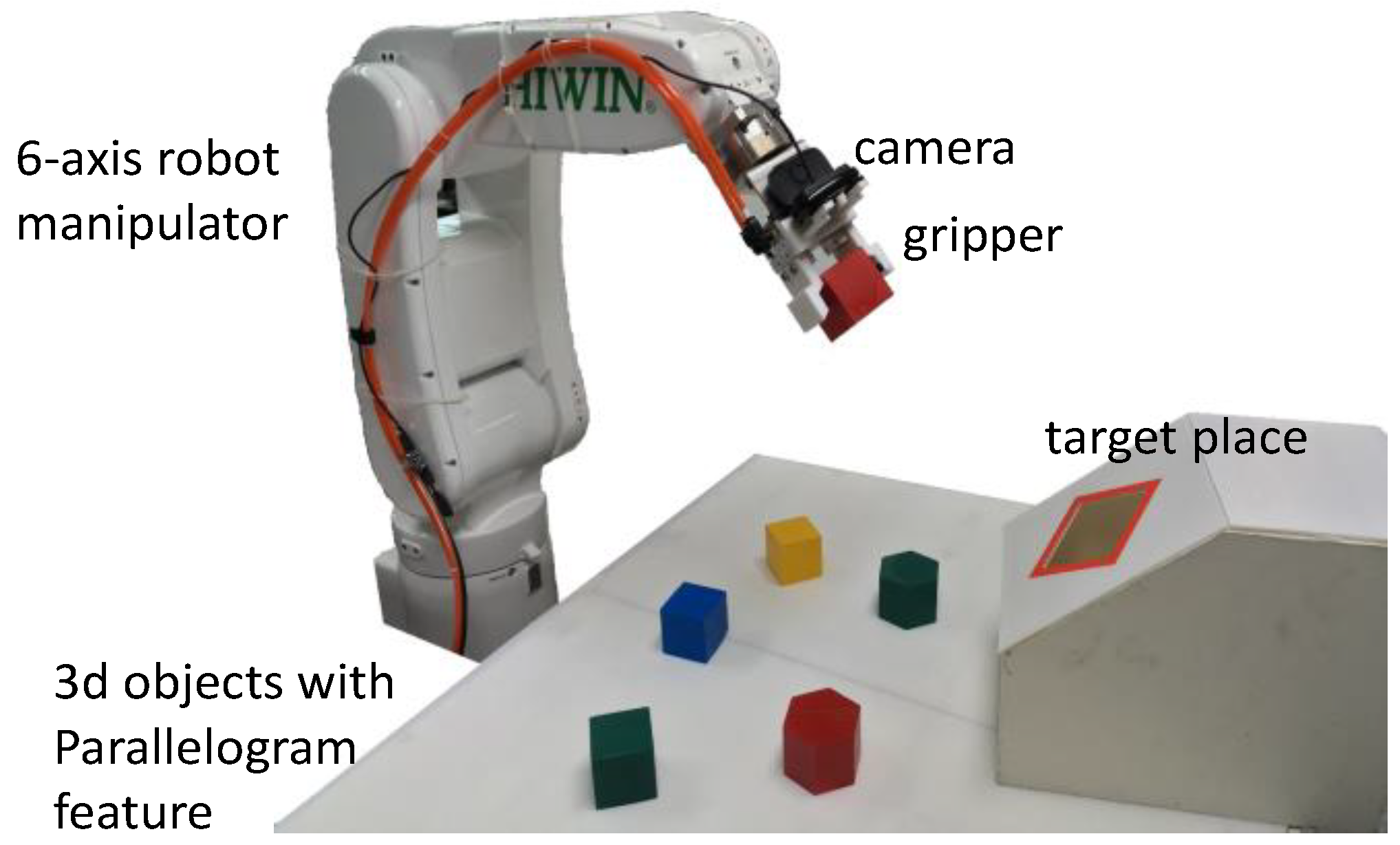
图源:A Simple Robotic Eye-In-Hand Camera Positioning and Alignment Control Method Based on Parallelogram Features,Figure 3。图中相机安装在机械臂末端附近,典型对应 eye-in-hand / wrist camera;外部固定相机则通常放在工作站上方或侧面,用来提供全局视角。
| 安装方式 | 长什么样 | 适合做什么 | 局限 |
|---|---|---|---|
| 固定外部相机 / eye-to-hand | 一台相机固定在桌面上方、侧面或工作站支架上 | 看全局桌面、记录轨迹、做俯视定位 | 被手臂或物体遮挡后看不到局部接触 |
| 腕部相机 / eye-in-hand | 小相机装在夹爪或手腕附近,跟着机械臂一起动 | 近距离对准、插入、抓取前校正 | 视野小,运动时画面变化大 |
| 移动机器人前置相机 | 机身前面一排镜头,常是双目或 RGB-D | 导航、避障、找物、房间级感知 | 看不到背后,近距离抓取还要配合腕部或外部相机 |
实际设备外观上,你可以先这样识别:
单目 RGB:一个镜头,像普通 USB 摄像头或手机单摄。双目 stereo:两个左右分开的镜头,像两只眼睛,中间距离叫 baseline。RGB-D / depth camera:通常有 RGB 镜头、红外发射器、红外接收器,正面会看到多个圆形窗口。多相机 rig:多个相机固定在不同位置,不一定每个都能测深度,但如果都标定好,可以联合定位。
2. 单目为什么不能直接成立体
单目相机只有一个视角。它把 3D 世界投影到 2D 图像上,投影时会丢掉深度。

图源:Wikimedia Commons: Pinhole camera model technical version - no annotation.svg。针孔模型的关键直觉是:3D 点经过相机光心投影到 2D 成像平面,深度在投影过程中被压缩到尺度变化里,所以单张单目图像天然存在绝对尺度歧义。
同一张图里,一个物体看起来大,可能有两种原因:
- 它真的很大;
- 它其实不大,只是离相机很近。
从一张单目图像本身,无法严格区分这两种情况。数学上可以理解为:3D 点沿着相机射线投影到同一个像素,深度 不同,但像素坐标可能一样。
这就是为什么单目有“尺度歧义”:
1 | near small object -> image looks big |
单目仍然很有用,但它通常适合回答:
- 这是什么物体?
- 物体大概在图像左边还是右边?
- 是否有文字、颜色、类别、语义关系?
- 根据经验估计相对远近。
它不适合单独回答:
- 这个杯口直径是不是 4cm?
- 夹爪离物体还有 2cm 还是 8cm?
- 物体精确 6D pose 是多少?
单目深度网络可以从大量数据中学到“地面、桌面、物体大小、透视关系”等先验,所以能估一个看起来合理的深度图。但它不是几何测量:换一个新场景、新相机、新尺度物体时,绝对深度可能偏。机器人抓取和插入任务通常不能只依赖单目估计。
3. 双目为什么能估计深度
双目相机有两个相机,左右之间有固定距离 ,这个距离叫 baseline。两个相机从不同位置看同一个点,这个点在左右图像里的像素位置会不同,差值叫 disparity。

图源:Wikimedia Commons: Stereo-camera-model.jpg。双目相机的深度来自两个相机之间的 baseline 和左右图像的 disparity;同一个 3D 点在左右图上的像素偏移越大,通常表示它离相机越近。
双目深度的直觉公式是:
其中:
- :点到相机的深度;
- :相机焦距;
- :左右相机距离,也就是 baseline;
- :左右图像中同一个点的像素位移,也叫 disparity。
直觉上:
- 物体越近,左右眼看到的位置差越大, 大, 小;
- 物体越远,左右眼看到的位置差越小, 小, 大。
所以双目能成立体,是因为它有两个视角,可以用三角测量恢复深度。
但双目也不是万能的:
| 问题 | 为什么 |
|---|---|
| 低纹理表面难 | 左右图找不到稳定匹配点,比如纯白墙、纯色杯子 |
| 透明/反光物体难 | 玻璃和金属会让左右图对应关系混乱 |
| 远距离误差大 | 远处 disparity 很小,几个像素误差就会放大成很大深度误差 |
| 需要标定 | 两个相机的相对位置、焦距、畸变必须知道 |
4. RGB-D 相机为什么能直接给深度
RGB-D 相机输出两张对齐图:
1 | RGB image: 每个像素是什么颜色 |

图源:Wikimedia Commons: Intel Realsense depth camera D435.jpg。RealSense D435 这类 RGB-D / depth camera 会同时提供彩色图像和深度相关传感数据;在机器人里,它常用来把像素反投影成点云,再接抓取、避障和 6D pose 估计。
常见 RGB-D 相机有两类主动深度原理:
| 类型 | 直觉 | 典型特点 |
|---|---|---|
| Structured light | 投射红外花纹,看花纹变形来算深度 | 近距离室内常见,强光或反光可能影响 |
| Time-of-flight / ToF | 发出红外光,测光返回时间或相位 | 结构紧凑,深度噪声和多径反射需要处理 |
也有一些 RGB-D 设备内部其实用的是主动双目:既有左右红外相机,也有红外投射器,用来给低纹理表面增加可匹配纹理。
RGB-D 对机器人很有用,因为它能把像素变成 3D 点。给定像素 、深度 、相机内参 ,可以反投影成相机坐标系下的 3D 点:
这就是点云的来源。点云不是另一种神秘数据,本质上就是“每个深度像素反投影出来的 3D 点集合”。
5. 深度图、点云和 6D pose 的关系
| 名词 | 是什么 | 机器人怎么用 |
|---|---|---|
| RGB 图 | 每个像素的颜色 | 识别类别、纹理、文字、语义 |
| 深度图 | 每个像素的距离 | 判断物体远近、避障、抓取前校正 |
| 点云 | 深度图反投影后的 3D 点集合 | 估计物体形状、桌面平面、碰撞体 |
| 6D pose | 物体的 3D 位置 + 3D 朝向 | 生成抓取点、放置点、规划轨迹 |
机器人抓取时常见链路是:
1 | RGB/RGB-D image |
如果只有 RGB,没有深度,也可以用模型估计 6D pose,但通常更依赖训练数据和物体 CAD 模型。对尺寸任务、插入任务、精细抓取来说,真实深度或多视角几何会稳很多。
6. 内参、外参和标定:把像素接回真实空间
相机能不能用于机器人,关键不只是有没有图,还要知道图和真实世界怎么对应。入门时可以先理解世界坐标系、相机坐标系、图像坐标系、像素坐标系,再理解内参和外参。这里把这条线补成具身智能里更实用的版本。

图源:Wikimedia Commons: Chessboard calibration setup.png。标定的核心是用已知尺寸的棋盘格、Charuco 或 AprilTag 等几何目标,把真实 3D 点和图像 2D 点配对;OpenCV 的 camera calibration 文档也把内参、外参和畸变放在同一套投影模型里解释。
棋盘格角点提供已知 3D 几何,图像中的角点提供 2D 像素坐标。标定就是让 投影出来的像素尽量对齐真实角点。内参 说明相机自己怎么成像,外参 说明相机相对世界或机器人 base 在哪里。
6.1 四个坐标系:先分清点在哪里
| 坐标系 | 原点在哪里 | 单位 | 在机器人里对应什么 |
|---|---|---|---|
| 世界坐标系 / world frame | 任务场景或机器人基座定义的参考点 | 米 | 桌面、工件、机器人 base、地图原点 |
| 相机坐标系 / camera frame | 相机光心 | 米 | 相机自己看到的 3D 空间,通常 指向前方 |
| 图像坐标系 / image plane | 成像平面中心或光轴交点附近 | 毫米或归一化坐标 | 透视投影后的连续 2D 坐标 |
| 像素坐标系 / pixel frame | 图像左上角 | 像素 | 图像数组里的 ,检测框和 mask 都在这里 |
具身系统里最常见的 bug,就是把这四个坐标系混在一起:检测模型输出的是像素坐标,深度反投影得到的是相机坐标,planner 需要的是机器人 base 或 world 坐标,success checker 可能又在仿真 world frame 里判断。
6.2 内参 K:相机自己怎么成像
内参描述的是相机自身的成像几何,和相机摆在哪里无关。最常见的 pinhole camera 内参矩阵是:
其中:
| 参数 | 含义 | 直觉 |
|---|---|---|
| 以像素为单位的焦距 | 焦距越大,同样大小的物体在图像里越大 | |
| 主点 / principal point | 光轴落在图像上的位置,通常接近图像中心 | |
| skew / 轴倾斜 | 大多数现代相机近似为 0 | |
| distortion | 畸变系数 | 镜头让直线弯曲,常见径向畸变和切向畸变 |
一个容易漏掉的细节:如果图像被 resize, 要按同样比例缩放;畸变系数通常不随分辨率直接缩放。这个细节在 VLA 数据预处理里很重要,否则同一台相机在不同分辨率下会变成两套不一致的几何。
6.3 外参 [R|t]:相机在哪里看
外参描述的是世界坐标系和相机坐标系之间的刚体变换:
齐次坐标写法是:
这里要特别小心两个方向:
| 名称 | 作用 | 机器人里常见叫法 |
|---|---|---|
w2c / world-to-camera |
把世界点变到相机坐标 | OpenCV 的很多投影公式使用这个方向 |
c2w / camera-to-world |
把相机点变到世界坐标 | 常被叫作 camera pose,也就是相机在世界里的位姿 |
两者互为逆矩阵。很多 3D 重建、NeRF、仿真器和机器人库对 pose 的方向约定不同,所以看到 camera_pose、extrinsic、T_wc、T_cw 时,第一件事不是写代码,而是确认它到底是 world -> camera 还是 camera -> world。
6.4 从世界点到像素点:一条公式串起来
OpenCV 文档里的 pinhole camera model 可以写成:
拆开看就是:
1 | world point Pw |
反过来,如果你有 RGB-D 图像,就可以用像素和深度反投影:
再用 c2w 或 T_base_camera 把点变到 world / robot base frame。机器人抓取、避障、焊缝观察和尺寸比较,本质上都在反复做这件事。
6.5 标定到底在求什么
相机标定就是用已知几何的标定物,把“真实 3D 点”和“图像 2D 点”对应起来,估计内参、畸变和每张图里的外参。常见流程是:
- 准备棋盘格或 AprilTag / Charuco 这类已知尺寸的标定板;
- 从不同位置、角度、距离拍多张图;
- 检测角点或 tag 角点,得到 2D image points;
- 根据格子尺寸生成对应的 3D object points;
- 用
calibrateCamera估计 、畸变和每张图的 ; - 用重投影误差检查标定质量;
- 对真实机器人,再做手眼标定,把 camera frame 接到 gripper / robot base frame。
OpenCV 的 calibrateCamera 会从多个标定板视角估计内外参;如果内参已知,只想求某个物体或标定板相对相机的位姿,通常用 solvePnP。这两个函数在具身系统里非常常用:前者回答“这台相机怎么成像”,后者回答“这个已知几何物体现在相对相机在哪里”。
6.6 Eye-to-hand、eye-in-hand 和手眼标定
机器人里外参还要分安装方式:
| 安装方式 | 要求的关键变换 | 用来做什么 |
|---|---|---|
| eye-to-hand 固定外部相机 | 或 | 把相机看到的物体位置变到机器人 base frame |
| eye-in-hand 腕部相机 | 末端移动时,相机跟着末端一起动,用于近距离对准 | |
| 多相机 rig | 每台相机到 rig / world / base 的外参 | 多视角融合、遮挡补全、轨迹记录 |
如果是腕部相机,只知道相机内参还不够。你还要知道相机相对夹爪的固定变换,否则相机看到目标在前方 5cm,夹爪并不知道该怎么把这 5cm 转成自己的运动。
6.7 具身数据里建议保存哪些字段
| 字段 | 建议含义 | 为什么要存 |
|---|---|---|
camera_intrinsic / K |
内参矩阵 | 深度反投影、3D 重建、投影可视化 |
distortion_coeffs |
径向/切向畸变参数 | 去畸变、真实相机迁移 |
T_world_camera 或 T_camera_world |
明确方向的相机位姿 | 多视图融合、从像素回到世界 |
T_base_camera |
相机到机器人 base 的变换 | 抓取和轨迹规划 |
T_gripper_camera |
腕部相机到夹爪的变换 | eye-in-hand 视觉伺服 |
timestamp |
图像、深度、关节状态的时间戳 | 移动中不同步会造成空间错位 |
image_size |
图像宽高 | resize 后检查内参是否同步缩放 |
命名上建议避免只写 extrinsic。更好的名字是 T_world_camera、T_camera_world、T_base_camera 这种带方向的名字;如果必须用 extrinsic,就在 schema 里明确它是 w2c 还是 c2w。
仿真里相机参数可以完美知道,但如果你未来要迁移到真实机器人,就要尽量让仿真相机的焦距、视角、分辨率、安装位置和真实设备接近。否则模型可能在仿真里学会了错误的视觉几何。更实际一点:仿真数据里也要保存 K、外参方向、分辨率和相机 frame,否则训练 VLA / 世界模型时很难复现观测。
第一,把 w2c 当成 c2w 用,投影结果会整体飞掉。第二,resize 图像后忘了缩放 ,点云会变形。第三,只看平均重投影误差,不检查边缘、远近距离和机器人工作区内的误差,部署时抓取会偏。
7. 不同相机在具身任务里的选择
| 任务 | 更常用的传感器 | 原因 |
|---|---|---|
| 桌面抓取 | RGB-D、双目、固定俯视相机 + 腕部相机 | 需要物体位置、深度、抓取前近距离校正 |
| 尺寸比较 | RGB-D、标定双目、多视角 | 需要可靠尺度,单目容易有尺度歧义 |
| 移动导航 | 前置双目、RGB-D、LiDAR、鱼眼相机 | 需要避障和房间级空间感知 |
| 精细插入 | 腕部相机、力觉、近距离 RGB-D | 末端附近微小误差很关键 |
| 数据采集 / 轨迹记录 | 多固定相机 + wrist camera | 方便回放、重建、标注失败原因 |
早期做仿真任务时,可以先从固定 RGB-D 或多视角相机开始,因为它更容易 debug。等任务跑通后,再减少 privileged state 或改成更接近真实部署的相机配置。
8. 单目、双目、RGB-D 在数据管线里怎么对应
资产生成流程:
1 | RGB 图像 -> 背景消除 -> 文字消除 -> 多视角生成 -> 图生 3D |
这是离线资产生产。这里的多视角更多是为了让 3D 生成模型补全形状和纹理,不等价于真实双目测距。
仿真/轨迹生成流程:
1 | 导入资产 -> 场景布置 -> 相机渲染 -> 估计状态或直接读取状态 |
这里的相机可以分两种使用方式:
| 用法 | 数据来源 | 用途 |
|---|---|---|
| privileged state | 仿真直接读取物体 pose、尺寸、速度 | 生成 GT、写 success checker、debug |
| visual observation | 从仿真相机渲染 RGB/RGB-D | 训练 VLA/WAM,让模型从图像推断状态 |
早期建议两者都保存。训练时可以只给模型图像和机器人状态;debug 和判定时用 privileged state。这样模型学的是视觉到动作,工程上仍能解释失败原因。
9. 常见误区
| 误区 | 更准确的说法 |
|---|---|
| 单目完全不能估深度 | 单目可以用先验估相对深度,但单张图没有可靠绝对尺度 |
| 双目一定比 RGB-D 好 | 双目依赖纹理和匹配,RGB-D 依赖主动深度,各有失败场景 |
| 多视图生成就是双目 | 多视图生成是资产生产或补视角,不是已标定双相机的几何测量 |
| 点云比图像高级 | 点云只是另一种表示,语义弱;图像语义强但几何弱 |
| 有深度就能抓 | 还需要分割、pose、抓取候选、碰撞检测、控制和 success checker |
| 仿真里相机随便放 | 相机位置会强烈影响模型学到的策略和真实迁移能力 |
10. 参考资料
- OpenCV: Camera Calibration and 3D Reconstruction:pinhole camera model、内参矩阵、外参矩阵、畸变和标定函数说明。
- OpenCV: Camera Calibration:径向/切向畸变、棋盘格标定、去畸变的入门教程。
- CSDN:相机标定–内参、外参:四个坐标系、内参/外参、棋盘格标定和重投影误差的中文入门脉络。
11. 和其他具身页面的连接
| 继续读 | 你会补上什么 |
|---|---|
| 资产到轨迹:感知、抓取与数据管线 | 相机输出如何进入资产、状态估计、抓取和轨迹生成 |
| 一个任务跑通具身闭环 | 深度和 pose 如何支撑尺寸排序、容器匹配和 success checker |
| 规划、控制与安全 | 感知到的 3D 状态如何变成可执行轨迹和安全约束 |
| VLA、WAM 与世界模型地图 | 相机观测如何进入 VLA、WAM 和世界模型路线 |
- Title: 具身智能:相机、深度与机器人视觉
- Author: Charles
- Created at : 2025-05-29 09:00:00
- Updated at : 2025-05-29 09:00:00
- Link: https://charles2530.github.io/2025/05/29/ai-files-embodied-ai-cameras-depth-and-robot-vision/
- License: This work is licensed under CC BY-NC-SA 4.0.