
论文专题讲解:Wan2.1:开源视频生成系统路线
- 论文:
Wan: Open and Advanced Large-Scale Video Generative Models - 链接:arXiv:2503.20314
- 代码与模型:Wan-Video/Wan2.1
- Wan2.2 官方资料:Wan-Video/Wan2.2 README
- 关键词:Video DiT、Flow Matching、velocity prediction、3D causal VAE、T2V、I2V、VACE、V2A、Wan-Bench、2D Context Parallelism、Wan2.2 MoE
Wan 这篇技术报告值得精读,不只是因为它把开源视频生成模型的效果往前推了一步,更因为它把视频基础模型从数据、VAE、DiT、Flow Matching、分布式训练、后训练、评测和推理优化完整摊开了。很多视频扩散论文只讲一个模块,Wan 更像一份系统设计说明:为什么要先训视频 VAE,为什么 DiT 要用 full spatio-temporal attention,为什么速度预测适合视频 latent,为什么 14B 视频模型必须把 Context Parallel、FSDP、offloading 和 cache 一起考虑。
如果把 Wan2.1 看作开源视频 foundation model 的基线,Wan2.2 则是它后续工程演进的一次明显升级。用户补充说 Wan2.2 没有单独论文,这一点需要在阅读时区分清楚:本页前半部分以 Wan2.1 论文为主,后半部分把 Wan2.2 官方 README 的介绍作为补充资料,不把 README 内容说成论文结论。
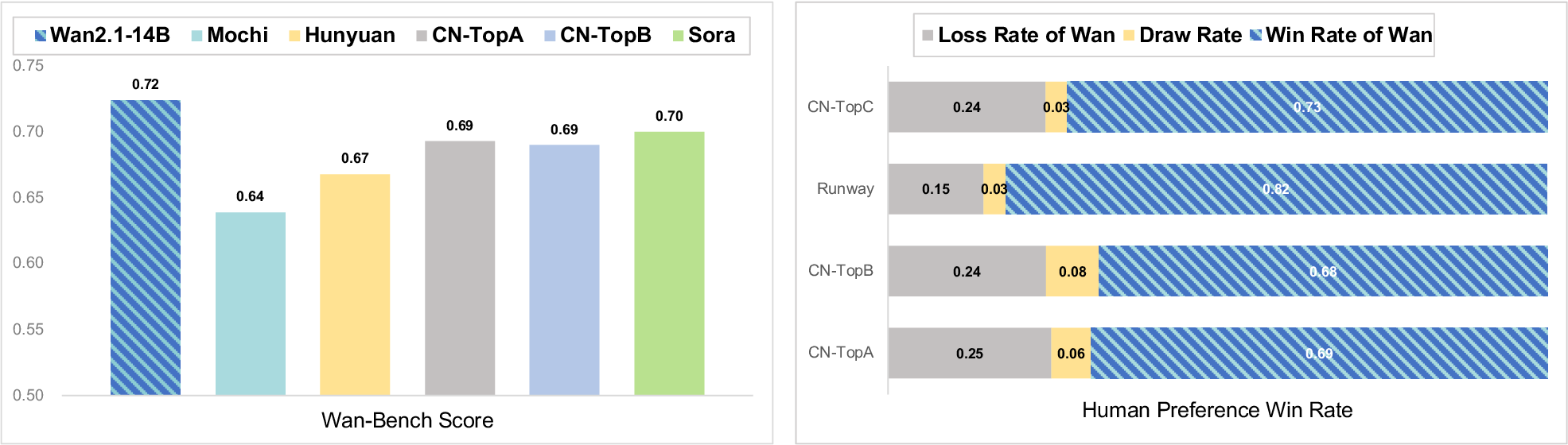
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 1。原论文图意:Wan 与开源、闭源视频生成模型在 benchmark 和人工评测下的总体比较。
 { width=“720” .atlas-figure-tall }
{ width=“720” .atlas-figure-tall }
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 2。原论文图意:Wan 生成样例,覆盖大幅运动、高保真细节、中英文视觉文字、T2V、I2V 和视频编辑能力。
论文位置
Wan 的核心问题不是“再做一个 text-to-video 模型”,而是回答开源视频基础模型的三道工程题:
- 质量:开源模型如何缩小和闭源商业模型在复杂运动、画质、文字生成和指令跟随上的差距;
- 能力面:一个底座能否同时支撑 T2V、I2V、视频编辑、个性化、实时生成和音频生成;
- 可用性:14B 模型如何训练和评测,1.3B 模型如何让消费级 GPU 用户也能调用。
这篇论文适合和站内三条线一起读。第一条是 视频与多模态扩散,它解释视频扩散为什么比图像扩散多了时间一致性和条件融合问题。第二条是 噪声日程与参数化,因为 Wan 的训练目标本质上是在 latent video space 里预测速度场。第三条是少步蒸馏路线,例如 CausVid 和 Phased DMD,它们后续都把 Wan 系列当成重要底座来压缩采样步数或改造成流式视频生成器。
| Layer | Wan design | Why it matters |
|---|---|---|
| Data engine | billions of images and videos, dense captioning, motion/quality/text filtering | 让模型同时学到空间语义、运动模式、镜头语言和视觉文字 |
| Video tokenizer | 3D causal Wan-VAE, compression 4 x 8 x 8, latent channels 16 |
把视频压到 DiT 可训练的 latent 序列,同时尽量保留时序信息 |
| Generator backbone | full spatio-temporal DiT with text cross-attention | 用同一主干建模空间布局、时间运动和文本条件 |
| Objective | Flow Matching / Rectified Flow velocity prediction | 直接学习从噪声 latent 流向视频 latent 的方向,便于 ODE 采样和少步化 |
| Training system | staged image-video curriculum, FSDP, 2D Context Parallelism, activation offloading | 解决长视频高分辨率下的吞吐、显存和稳定性问题 |
| Product interface | T2V, I2V, editing, personalization, real-time, V2A | 证明底座不是单任务 demo,而是多任务视频生成平台 |
数据管线:先把视频分布修好
视频生成模型很容易被低质数据拖垮。Wan 的数据管线强调三件事:规模足够大、分布足够多样、质量过滤足够细。论文使用内部版权来源和公开数据构建候选集,规模达到 billions of videos and images,然后用四类过滤和再标注流程逐步收紧。
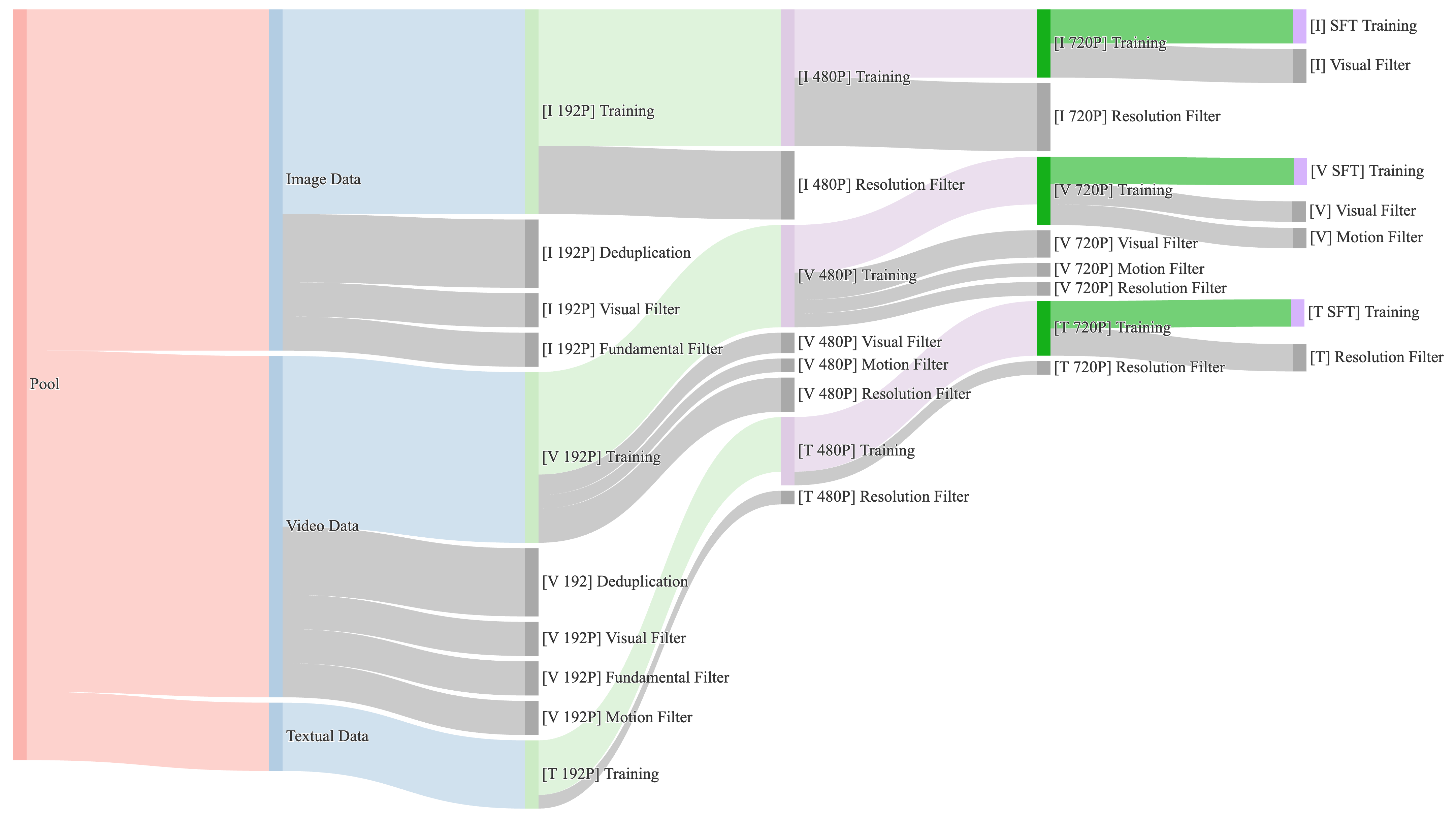
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 3。原论文图意:不同训练阶段的数据供给策略会动态调整 motion、quality 和 category 的比例。
这张图不要按“一批数据从左到右过滤一次”来读,它更像一张训练数据调度图。左侧的 Pool 是原始候选池,先被拆成 Image Data、Video Data 和 Textual Data;后面的 [I]、[V]、[T] 分别表示 image、video、textual 数据流,192P / 480P / 720P 表示不同分辨率训练阶段。灰色带子是过滤或去重,绿色块是进入训练的部分,紫色块多和分辨率筛选相关。
核心信息是:Wan 不是固定一个数据配比从头训到尾,而是在不同阶段重新决定“给模型看什么”。早期 192P 阶段更看重规模和覆盖面,用较低成本让模型先学基本语义、构图和粗时序;到 480P / 720P 阶段,数据会经过更强的 visual filter、motion filter 和 resolution filter,训练集中高画质、高分辨率、运动更有意义的视频比例会上升;到 SFT 阶段,数据进一步收窄,更多服务最终观感、复杂动作、文字生成和用户偏好。
图注里的 motion / quality / category 可以这样理解:motion 是视频运动分布的重采样,避免模型被静态、抖动或低质量运动视频带偏;quality 是画质、清晰度、压缩噪声、审美和分辨率门槛随阶段提高;category 是图像、视频、文字数据以及内容类别的比例控制,防止只追求高分样本而丢掉长尾场景、物体、风格和文字能力。换句话说,这张图想表达的不是“过滤越多越好”,而是每个训练阶段都在重新平衡数据的运动、画质和类别覆盖。
最底层过滤先处理“明显不该进训练集”的样本:OCR/text coverage 过高、审美分低、NSFW、水印和 logo、黑边、过曝、生成图污染、模糊、时长和分辨率不达标。论文特别提到,少量生成图污染也会明显伤害模型表现,所以训练了 synthetic image detector 来过滤。这一步会去掉约 50% 初始数据。
第二层是视觉质量。团队把数据聚成 100 个 cluster,再从每个 cluster 抽样人工打 1 到 5 分,训练专家质量评分器。这比直接全局排序更稳,因为视频数据有长尾:如果只按平均质量筛,很容易把小众但有价值的运动、场景或风格删掉。
第三层是运动质量。Wan 把视频分成 Optimal motion、Medium-quality motion、Static Videos、Camera-driven Motion、Low-quality Motion、Shaky camera footage 六类。这个划分很关键:静态访谈视频可能画质高,但对大幅运动帮助有限;航拍镜头有强相机运动,但主体运动少;抖动素材会把运动模糊和镜头噪声教给模型。
第四层是视觉文字数据。Wan 一边合成数亿张含中文字符的纯底文字图,一边从真实图片和视频里用 OCR 抽取中英文文字,再用 Qwen2-VL 生成包含精确文字内容的自然描述。这个设计解释了论文为什么强调 Wan 能生成中英文视觉文本:它不是单靠大模型“涌现”,而是数据构造明确把 OCR、caption 和渲染样本接进了训练。
用户 prompt 往往很短,但训练视频需要知道对象、动作、镜头、风格、颜色、空间关系和文字内容。Wan 训练了内部 caption model,把网页原始短描述扩成 dense captions。这个 caption model 使用 LLaVA-style 架构:ViT 提取图像和视频帧特征,MLP 投到 Qwen LLM;视频输入按 3 FPS 采样,最多 129 帧,并用 slow-fast encoding 降低视觉 token 成本。训练分三阶段:先冻结 ViT/LLM 只训 MLP,对齐视觉和语言空间;再全参训练;最后用小规模高质量数据端到端收口。
Wan-VAE:视频模型的压缩器不是配角
视频 DiT 的 token 数随时间、分辨率快速膨胀,所以 VAE 决定了后面模型能不能训练。Wan-VAE 是 3D causal VAE,把视频从像素空间压到 latent 空间,时空压缩比例是 4 x 8 x 8,latent channel 是 16。输入视频记作 ,编码后 latent 形状变成:
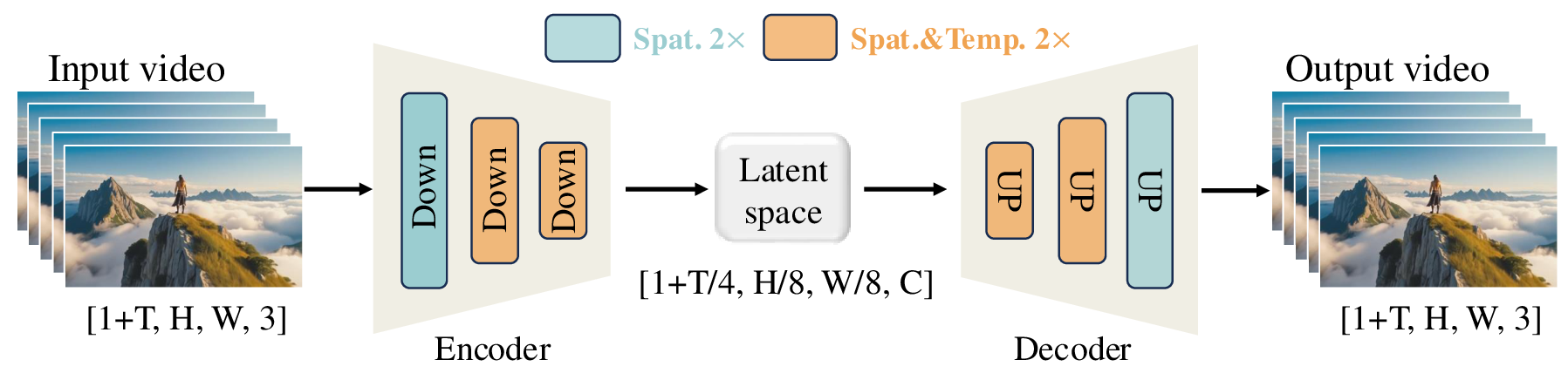
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 4。原论文图意:Wan-VAE 用 3D causal 结构实现 4 x 8 x 8 时空压缩;橙色块表示时空 2x 压缩,绿色块表示空间 2x 压缩。
Wan-VAE 有几个细节值得记住。第一帧只做空间压缩,不做时间压缩,这让模型更自然地兼容图像数据和 I2V 的首帧条件。所有 GroupNorm 被替换成 RMSNorm,用来保持 temporal causality;空间上采样层把输入 feature channel 减半,让推理显存降低约 33%;模型规模控制在 127M 参数。
VAE 的训练也不是一步完成:
| Stage | Training setup | Purpose |
|---|---|---|
| 2D image VAE | train the same-structure 2D VAE on images | 先学稳定空间压缩先验 |
| Inflate to 3D causal VAE | train on low-resolution 128 x 128, 5-frame videos |
让视频 VAE 快速获得时序建模能力 |
| High-quality video fine-tuning | train on videos with different resolutions and frame numbers, add GAN loss from a 3D discriminator | 修复高分辨率细节、动态场景和真实视频纹理 |
训练损失由 L1 reconstruction、KL 和 LPIPS 组成,权重分别是 3、3e-6 和 3;最后阶段加入 3D discriminator 的 GAN loss。论文的一个实用结论是:Wan-VAE 在相同压缩率和 latent channel 下重建速度比 Hunyuan Video VAE 快 2.5x,这会直接影响后续 DiT 训练吞吐。
causal convolution 不能看未来帧,所以长视频可以按 chunk 编码/解码。Wan-VAE 把视频切成和 latent 时间步对应的 chunk,每个 chunk 最多处理 4 帧,并缓存上一段 causal convolution 需要的历史 feature。这样既不会破坏时间因果性,又能避免一次性把整段长视频塞进显存。
Video DiT 与 Flow Matching
Wan 的生成主干由三部分组成:Wan-VAE、diffusion transformer 和 umT5 text encoder。VAE 冻结后,DiT 在视频 latent 上学习去噪/流场。给定 latent ,patchifying 模块使用 kernel size 为 (1, 2, 2) 的 3D convolution,把 latent 展平为序列:
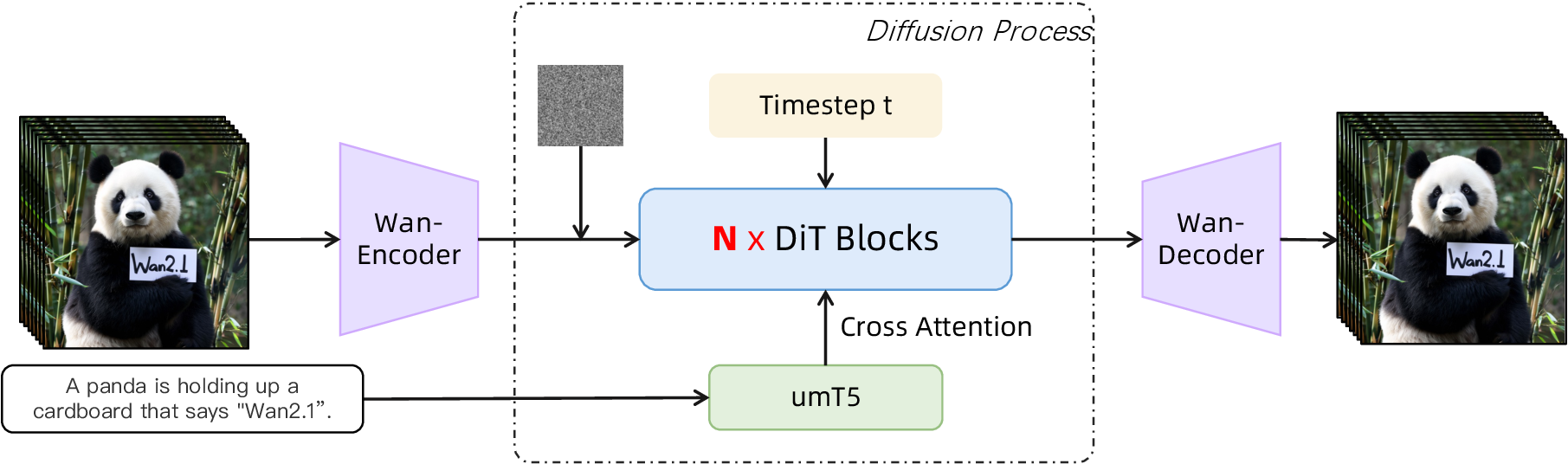
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 5。原论文图意:Wan 架构由 Wan-VAE、Video DiT 和 umT5 text encoder 组成,DiT 通过 cross-attention 接入文本条件。
Transformer block 内部用 full spatio-temporal self-attention 建模时空关系,再通过 cross-attention 注入文本。时间步 embedding 经过一个共享 MLP 预测六组 modulation 参数;这个 MLP 在所有 blocks 间共享,但每个 block 学不同 bias。论文说这个设计减少约 25% 参数,并在同等规模下带来更好表现。这个点很像在问:参数应该花在每层 adaLN 上,还是花在更深的主干上?Wan 的消融支持后者。
速度预测到底在预测什么
Wan 使用 Flow Matching / Rectified Flow 风格目标。训练时先取真实视频或图片 latent ,再取高斯噪声 ,时间 从 logit-normal distribution 采样。中间状态是线性插值:
这条路径上的真实速度是:
模型输出 ,直接回归这条速度:
这里 是长度为 512 token 的 umT5 文本 embedding。
这里的 velocity 是高维 latent 空间里的生成方向:当前 noisy video latent 应该沿哪个方向流向干净视频 latent。它不是 optical flow,也不是人物或相机在画面中的物理速度。对视频 DiT 来说,这种目标比“只预测噪声”更接近采样器实际要积分的 ODE 方向,因此和少步采样、蒸馏、缓存优化更容易衔接。
扩散模型里常说的 -prediction 通常是换一个监督坐标:模型仍围绕给定噪声日程学习 denoising target。Flow Matching 更直接:先定义从噪声分布到数据分布的连续路径,再让网络拟合路径上的 vector field。Wan 采用的是后者的训练语言,因此推理可以看成从随机 video latent 出发,沿速度场积分到数据 latent,再由 VAE 解码成视频。
预训练与后训练:从图像语义到 720P 视频
Wan 没有从一开始就直接训练 720P 长视频。论文指出直接高分辨率长视频联合训练会遇到两个问题:81 帧、1280x720 这类序列让吞吐严重下降;显存压力又迫使 batch size 太小,导致梯度方差尖峰和训练不稳定。因此 14B 模型先做低分辨率图像预训练,再逐步引入视频。
| Phase | Data and resolution | Main function |
|---|---|---|
| Image pre-training | low-resolution 256 px text-to-image |
建立文本语义、几何结构和跨模态对齐 |
| Joint stage 1 | 256 px images + 5-second videos at 192 px, 16 fps |
用低成本视频建立基础时空关系 |
| Joint stage 2 | images and videos upgraded to 480 px, fixed 5-second duration |
提升画质和运动细节 |
| Joint stage 3 | images and 5-second videos upgraded to 720 px |
对齐高分辨率生成目标 |
| Post-training | curated 480 px and 720 px video data |
强化视觉保真、运动动态和用户偏好相关能力 |
预训练配置上,Wan 使用 bf16 mixed precision、AdamW、weight decay 1e-3、initial learning rate 1e-4,并根据 FID 和 CLIP Score plateau 动态降低学习率。后训练保持同样模型结构和 optimizer 配置,从预训练 checkpoint 初始化,用高质量后训练视频数据在 480P 和 720P 上联合训练。
视频数据负责运动和时序,图像数据负责高质量空间语义、构图、文字和细节覆盖。只训视频会受限于视频帧质量、压缩噪声和内容分布;只训图像又不会自然学到运动。Wan 的 staged image-video joint training,本质上是在用图像补空间分布,用视频补时间分布。
大规模训练系统:注意力才是主要瓶颈
Wan 的系统章节很有价值,因为它把视频 DiT 和 LLM 的成本差异讲清楚了。训练时只有 DiT 优化,VAE encoder 和 text encoder 冻结。DiT 占总训练计算超过 85%。对 DiT 来说,计算量可近似写成:
其中 是层数, 是 micro batch size, 是 sequence length, 是 hidden dimension。视频 很容易到几十万甚至百万,attention 的 项会逐渐压过线性层。论文说当 sequence length 到 1M 时,attention 可占端到端训练时间 95%。
显存同样麻烦。DiT activation memory 可写成 ,而视频 DiT 的 往往大于普通 LLM;14B DiT 在 1M tokens、micro batch size 1 的场景下,activation 可超过 8 TB。
这里的 可以理解成每一层、每个 token、每个 hidden channel 需要额外保存多少份中间激活的常数系数。 只描述了“层数 × batch × 序列长度 × hidden 维度”这个基本体积,但训练反向传播不能只保存 block 输入,还要保存 attention 的 Q/K/V、attention output、MLP 中间结果、norm / modulation、dropout 或 mask 相关状态,以及为了分布式通信和重排产生的临时 buffer。把这些额外项合在一起,就得到论文里用来粗略估算 activation memory 的 。
为什么视频 DiT 的 往往更大?一方面,视频 token 同时包含时间和空间维,sequence length 已经很大;另一方面,full spatio-temporal attention、3D patch/reshape、cross-attention 和长序列并行会让训练时需要保留更多中间张量。普通 LLM 的 token 序列通常是一维文本,kernel 和并行实现也更成熟,很多 activation 可以更稳定地重算或融合;视频 DiT 的中间状态更重、更碎,所以即使公式都写成 量级,前面的 也会把显存需求放大很多。
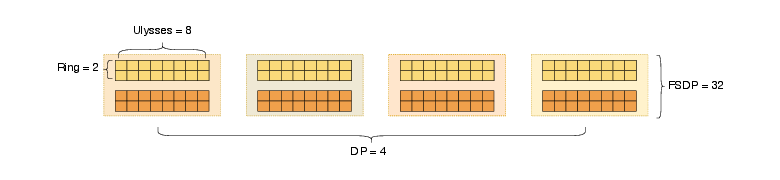
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 8。原论文图意:128 GPUs 下,内层用 Ulysses=8 与 Ring=2 组成 2D Context Parallelism,外层用 FSDP=32 和 DP=4。
Wan 的并行策略是:
| Module | Parallelism | Reason |
|---|---|---|
| VAE | DP | 显存占用小,直接数据并行即可 |
| Text encoder | DP + weight sharding | text encoder 超过 20GB,需要权重切分 |
| DiT parameters | FSDP | 参数、梯度和 optimizer states 无法单卡容纳 |
| DiT activations | 2D Context Parallelism | 沿 sequence/context 维切分,降低长序列 attention 显存 |
2D Context Parallelism 把 Ring Attention 放在外层,Ulysses 放在内层。Ulysses 对跨机通信敏感,Ring Attention 对 block size 有要求,把两者组合起来可以更好地隐藏通信。论文给出的例子是 256K sequence、16 GPUs、2 machines:2D CP 把通信开销从 Ulysses 的 10% 以上降到 1% 以下。
长视频场景里 attention 计算很重,计算时间足够覆盖一部分 PCIe activation offload 时间。Wan 因此优先使用 activation offloading,把部分 activation 挪到 CPU 内存并和计算重叠;当 CPU 内存也吃紧时,再结合 gradient checkpointing,优先 checkpoint 那些 GPU memory / compute ratio 高的层。
推理优化:50 步视频采样怎么降延迟
Wan 的默认推理仍然是多步采样,论文说通常约 50 sampling steps。对 14B 模型,如果没有额外优化,单张高端 GPU 上推理可到约 30 分钟量级,所以推理优化不是锦上添花,而是能否使用的前提。
推理侧主要有三类优化:
| Technique | Wan implementation | Reported effect |
|---|---|---|
| FSDP + 2D CP | training-side parallelism reused for inference | 14B DiT 多 GPU 近似线性加速 |
| Diffusion cache | reuse attention outputs across steps; reuse conditional output for CFG later stages with residual compensation | 14B T2V inference speedup 1.62x |
| FP8 GEMM | per-tensor weight quantization, per-token activation quantization for GEMM in DiT block | BF16 GEMM 约 2x 算力,DiT speedup 1.13x |
| 8-bit FlashAttention | Int8 for S=QK^T, FP8 for O=PV, FP32 cross-block accumulation |
95% MFU on NVIDIA H20, inference speedup >1.27x |
这里的 cache 不是简单“偷懒少算”。论文观察到两个相似性:同一 DiT block 的 attention output 在相邻采样步之间相似;CFG 后期 conditional 与 unconditional 输出也相似。因此可以选择部分 step 真正跑 attention 或 unconditional branch,其余 step 复用并做 residual compensation。视频模型每步都很贵,这类跨步复用的收益会比图像模型更明显。
评测:Wan-Bench 不只看 FVD/FID
Wan 认为 FVD/FID 和人类感知不够对齐,于是提出 Wan-Bench。它分成 dynamic quality、image quality、instruction following 三大维度,共 14 个细粒度指标。简单任务用传统 detector,复杂任务用 MLLM;最终分数用超过 5,000 组 pairwise human comparisons 学出来的偏好权重加权。
| Wan-Bench Dimension | CNTopB | Hunyuan | Mochi | CNTopA | Sora | Wan 1.3B | Wan 14B |
|---|---|---|---|---|---|---|---|
| Large Motion Generation | 0.405 | 0.413 | 0.420 | 0.284 | 0.482 | 0.468 | 0.415 |
| Human Artifacts | 0.712 | 0.734 | 0.622 | 0.833 | 0.786 | 0.707 | 0.691 |
| Pixel-level Stability | 0.977 | 0.983 | 0.981 | 0.974 | 0.952 | 0.976 | 0.972 |
| ID Consistency | 0.940 | 0.935 | 0.930 | 0.936 | 0.925 | 0.938 | 0.946 |
| Physical Plausibility | 0.836 | 0.898 | 0.728 | 0.759 | 0.933 | 0.912 | 0.939 |
| Smoothness | 0.765 | 0.890 | 0.530 | 0.880 | 0.930 | 0.790 | 0.910 |
| Comprehensive Image Quality | 0.621 | 0.605 | 0.530 | 0.668 | 0.665 | 0.596 | 0.640 |
| Scene Generation Quality | 0.369 | 0.373 | 0.368 | 0.386 | 0.388 | 0.385 | 0.386 |
| Stylization Ability | 0.623 | 0.386 | 0.403 | 0.346 | 0.606 | 0.430 | 0.328 |
| Single Object Accuracy | 0.987 | 0.912 | 0.949 | 0.942 | 0.932 | 0.930 | 0.952 |
| Multiple Object Accuracy | 0.840 | 0.850 | 0.693 | 0.880 | 0.882 | 0.859 | 0.860 |
| Spatial Position Accuracy | 0.518 | 0.464 | 0.512 | 0.434 | 0.458 | 0.476 | 0.590 |
| Camera Control | 0.465 | 0.406 | 0.605 | 0.529 | 0.380 | 0.483 | 0.527 |
| Action Instruction Following | 0.917 | 0.735 | 0.907 | 0.783 | 0.721 | 0.844 | 0.860 |
| Weighted Score | 0.690 | 0.673 | 0.639 | 0.693 | 0.700 | 0.689 | 0.724 |
表源:Wan: Open and Advanced Large-Scale Video Generative Models,Table 1。原论文表格标题:Performance comparison of commercial and open-source models using Wan-Bench.
VBench 上,Wan 14B 也给出了比较强的公开结果:
| Model Name | Quality Score | Semantic Score | Total Score |
|---|---|---|---|
| MiniMax-Video-01 | 84.85% | 77.65% | 83.41% |
| Hunyuan (Open-Source Version) | 85.09% | 75.82% | 83.24% |
| Gen-3 (2024-07) | 84.11% | 75.17% | 82.32% |
| CogVideoX1.5-5B (5s SAT prompt-optimized) | 82.78% | 79.76% | 82.17% |
| Kling (2024-07 high-performance mode) | 83.39% | 75.68% | 81.85% |
| Sora | 85.51% | 79.35% | 84.28% |
| Wan 1.3B | 84.92% | 80.10% | 83.96% |
| Wan 14B (2025-02-24) | 86.67% | 84.44% | 86.22% |
表源:Wan: Open and Advanced Large-Scale Video Generative Models,Table 3。原论文表格标题:Model performance scores on Vbench.
多任务扩展:底座能力如何接到产品接口
Image-to-Video
I2V 把首帧作为条件,让文本不再独自决定整个视频。Wan 的做法是把条件图像拼成首帧加零帧序列,送入 Wan-VAE 得到 condition latent;再用 binary mask 标记哪些帧要保留、哪些帧要生成。noise latent、condition latent 和 mask 沿 channel 维拼接后送进 DiT。由于输入 channel 从 变成 ,I2V DiT 前面加了一个 zero-init projection layer,避免一开始破坏 T2V 预训练能力。
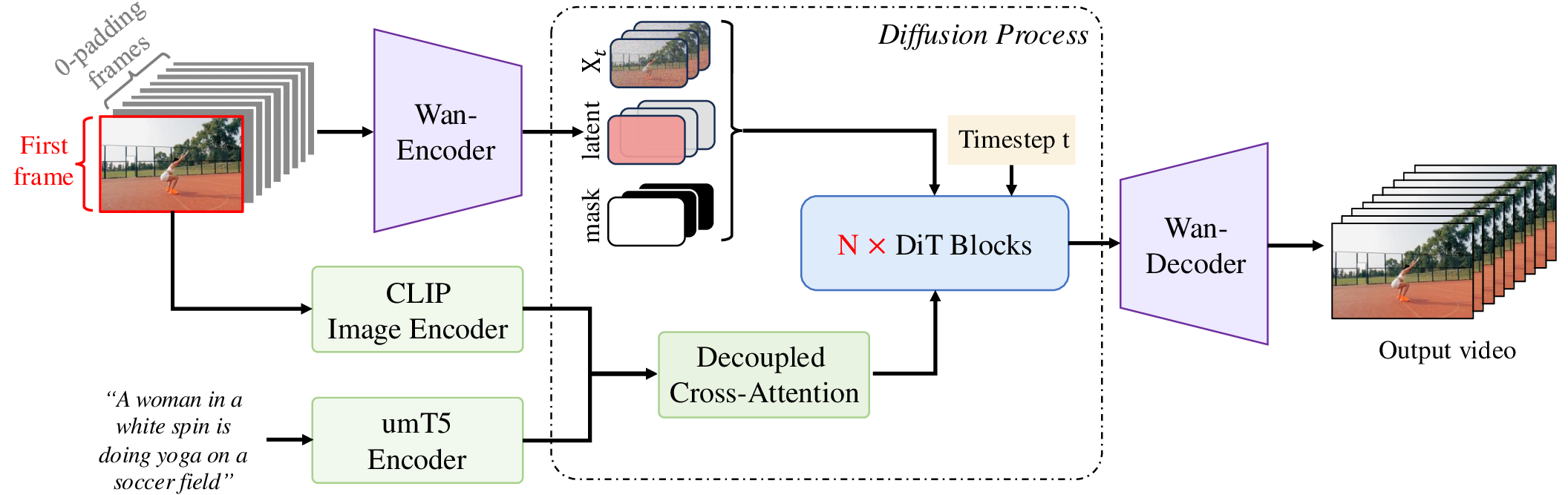
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 15。原论文图意:Wan-I2V 用 mask mechanism 统一支持 image-to-video、video continuation、first-last frame transformation 等任务。
训练上,I2V 先用和 T2V 相同的数据做联合预训练,让模型学会在 mask 框架下判断哪些位置保留、哪些位置生成;SFT 阶段再加入 CLIP image encoder 和 decoupled cross-attention。数据过滤也服务于任务特性:I2V 用 SigLIP 过滤首帧与后续视频差异过大的样本,video continuation 过滤前 1.5 秒与后 3.5 秒不一致的样本,first-last frame transformation 则提高首尾变化显著样本比例。
Unified Video Editing
Wan 的视频编辑来自 VACE 思路,把 text prompt、context frames 和 masks 组合进 Video Condition Unit。关键是 concept decoupling:用 mask 把要修改的 reactive frames 和要保留的 inactive frames 分开,分别编码进 latent,再和 noisy video tokens 对齐。训练有两种模式:一种是 fully fine-tuning 整个 Wan,另一种是 Context Adapter Tuning,把 context tokens 经由 adapter 接回原 DiT block,减少对底座权重的改动。
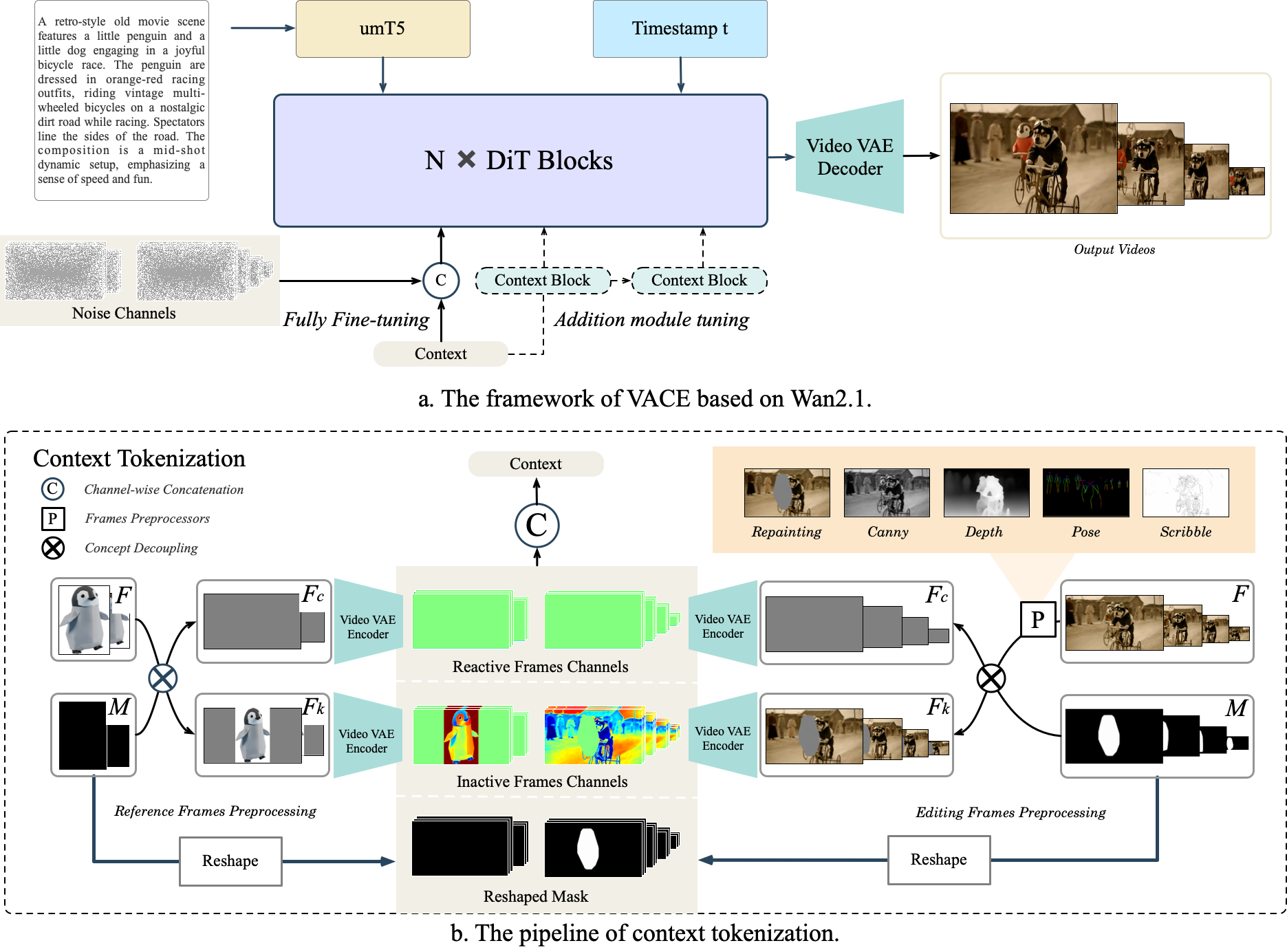
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 17。原论文图意:统一可控生成与编辑框架,用 Concept Decoupling、Context Latent Encode 和 Context Embedder 处理 frames 与 masks。
Video-to-Audio
V2A 模块说明 Wan 不只把视频扩散当作视觉生成器。它用 DiT + Flow Matching 在音频 latent 里生成 ambient sound 和 background music,明确排除 speech/vocal。音频压缩器不是 mel-spectrogram 图像 VAE,而是直接处理 raw waveform 的 1D-VAE,输出 latent,以保留时间对齐。训练数据来自视频集过滤,移除无声、语音和人声音乐视频,规模是 thousand hours;音频 caption 用 Qwen2-audio 生成,并分成 dense video description、ambient sound、background music 三部分。
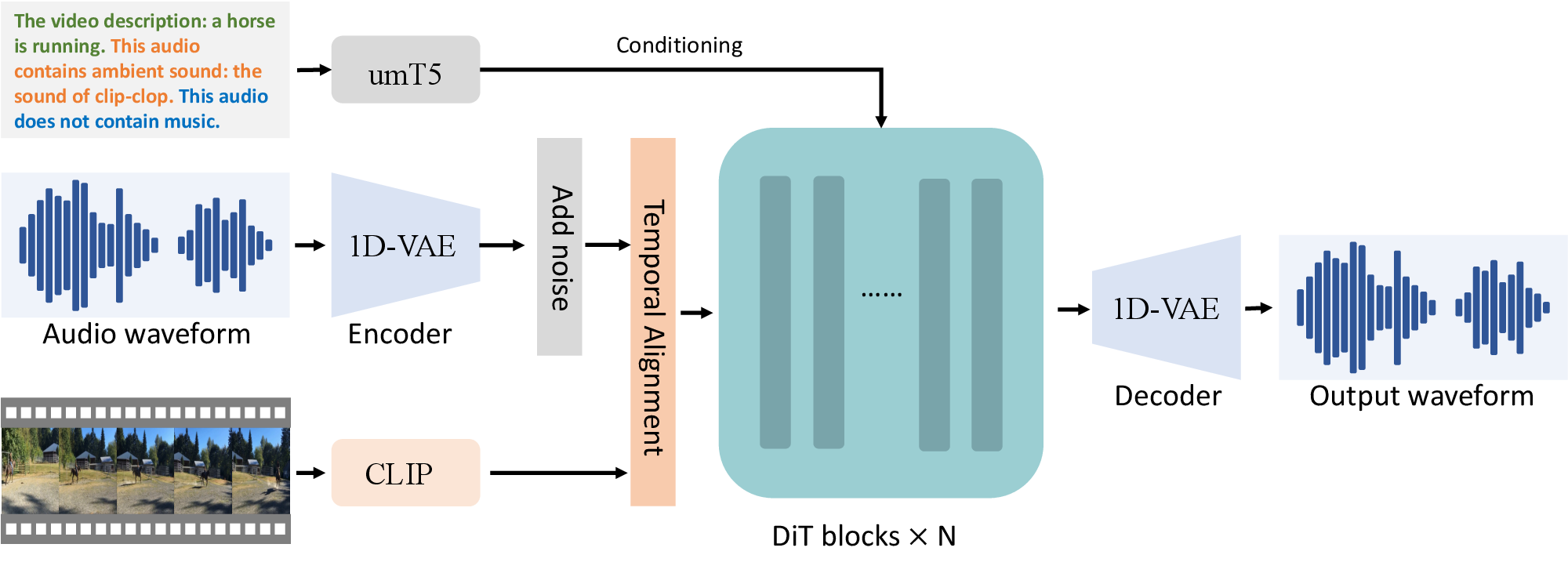
图源:Wan: Open and Advanced Large-Scale Video Generative Models,Figure 23。原论文图意:V2A 模型同时处理视频 chunk 和文本描述,合成语义一致且时间对齐的音频。
Wan2.2 README 补充:没有单独论文,但有官方路线说明
Wan2.2 官方 GitHub README 仍然把论文链接指向 Wan2.1 的 arXiv 报告。因此更准确的说法是:Wan2.2 目前主要由官方 README、模型权重、Diffusers/ComfyUI 集成和若干分支技术报告构成,不应把它当成一篇独立论文来读。不过 README 的介绍非常值得放进 Wan 专题,因为它展示了 Wan 系列从 2.1 到 2.2 的工程演进。
README 开头列出四个升级点:
| Innovation | Official README explanation | Reading note |
|---|---|---|
| Effective MoE Architecture | introduces MoE into video diffusion models and separates denoising across timesteps | 按扩散时间分专家,而不是 LLM 式 token router |
| Cinematic-level Aesthetics | curated aesthetic data with labels for lighting, composition, contrast and color tone | 后训练数据更贴近影视风格控制 |
| Complex Motion Generation | +65.6% more images and +83.2% more videos than Wan2.1 |
数据扩展主要服务 motion、semantics、aesthetics 泛化 |
| Efficient High-Definition Hybrid TI2V | 5B model with Wan2.2-VAE, 16 x 16 x 4 compression, 720P@24fps, can run on 4090 |
用更高压缩和统一 T2V/I2V 接口换部署可达性 |
表源:Wan-Video/Wan2.2 官方 README。表格根据 README 开头 With Wan2.2, we have focused on incorporating the following innovations 部分重绘,保留英文字段。
Wan2.2 A14B:按噪声阶段分工的 MoE
Wan2.2 最核心的新信息是 A14B 系列的两专家 MoE。README 说每个 expert 约 14B 参数,总参数约 27B,但每一步只激活约 14B,因此推理计算和显存接近原 14B dense 模型。分工方式沿 denoising timestep / SNR 发生:高噪声早期用 high-noise expert,负责整体 layout;低噪声后期用 low-noise expert,负责视频细节。

图源:Wan-Video/Wan2.2 官方 README,assets/moe_arch.png。原 README 图意:Wan2.2 把两个专家按 denoising 阶段接入视频扩散模型,每一步只激活对应专家。
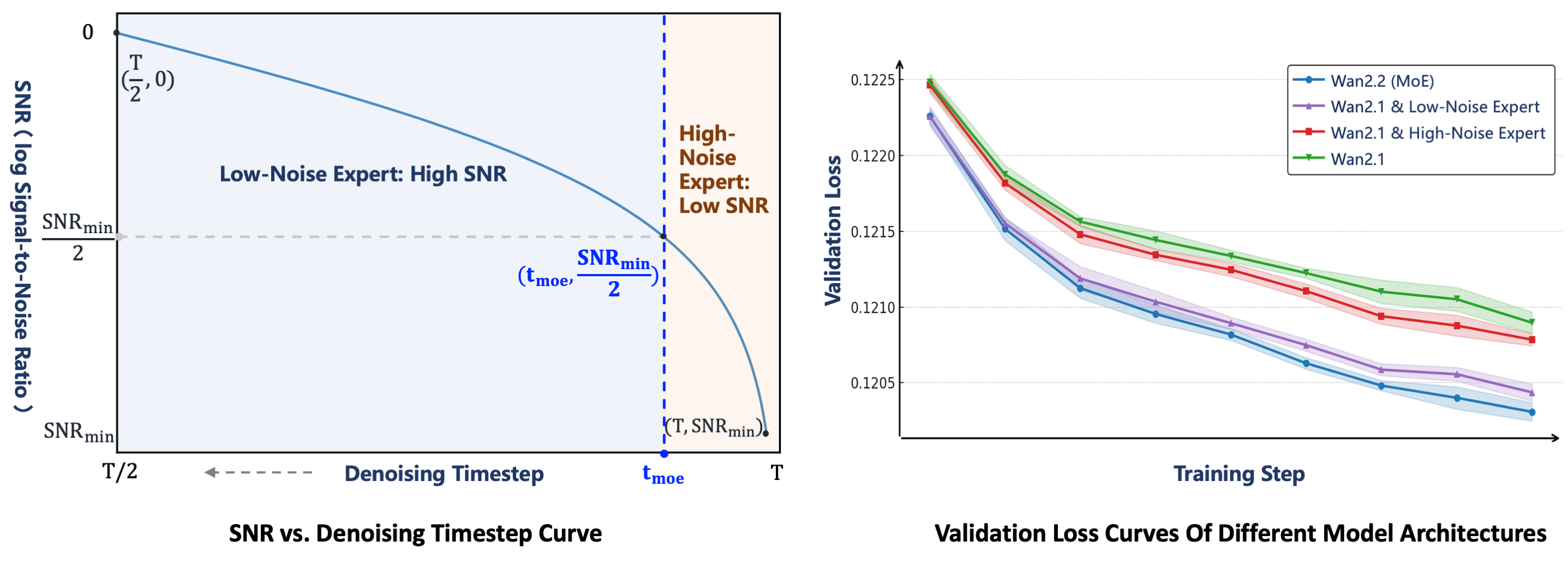
图源:Wan-Video/Wan2.2 官方 README,assets/moe_2.png。原 README 图意:专家切换点由 SNR 决定,高噪声阶段激活 high-noise expert,低噪声阶段切换到 low-noise expert,并通过 validation loss 比较 MoE 组合效果。
扩散/Flow 采样一开始离数据分布很远,latent 里还没有稳定对象、镜头和运动结构。这一段的错误会影响整段视频,比如主体位置、场景布局、运动方向和镜头路线。后期低噪声阶段结构已经基本成形,模型更多是在修边缘、纹理、局部闪烁和细节。因此 Wan2.2 按 SNR 切专家,比随机路由或 token-level router 更符合视频生成的时间结构。
Wan2.2 TI2V-5B:高压缩换 720P 可部署
Wan2.2 的另一个重点是 TI2V-5B。README 介绍它使用 high-compression Wan2.2-VAE, 压缩率为 4 x 16 x 16,总压缩率为 64;再经过额外 patchification layer 后,总压缩比达到 4 x 32 x 32。它原生支持 text-to-video 和 image-to-video,在 720P@24fps 下可运行于消费级显卡如 RTX 4090。README 的运行示例也说明:TI2V-5B 单卡命令推荐配合 --offload_model True、--convert_model_dtype 和 --t5_cpu,最低显存说明为 24GB;A14B T2V/I2V/S2V 单卡示例则标注至少 80GB VRAM。
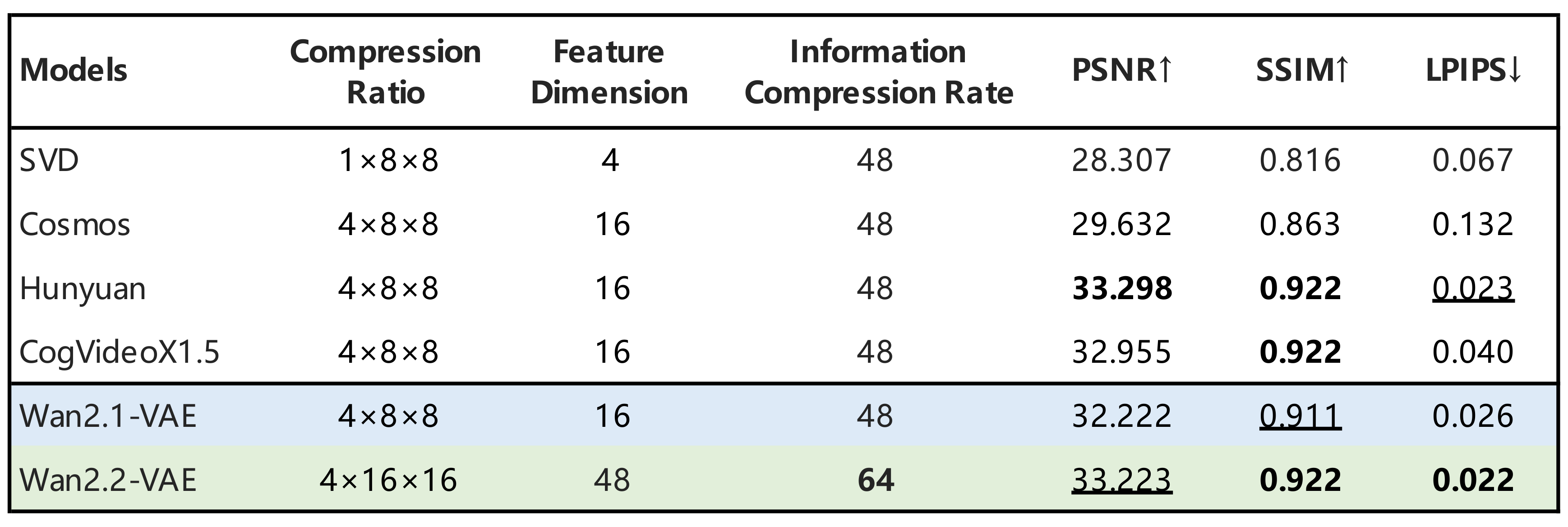
图源:Wan-Video/Wan2.2 官方 README,assets/vae.png。原 README 图意:Wan2.2-VAE 采用更高空间压缩,服务 TI2V-5B 的 720P 高效生成。
| Models | Download Links | Description |
|---|---|---|
| T2V-A14B | Huggingface / ModelScope | Text-to-Video MoE model, supports 480P & 720P |
| I2V-A14B | Huggingface / ModelScope | Image-to-Video MoE model, supports 480P & 720P |
| TI2V-5B | Huggingface / ModelScope | High-compression VAE, T2V+I2V, supports 720P |
| S2V-14B | Huggingface / ModelScope | Speech-to-Video model, supports 480P & 720P |
| Animate-14B | Huggingface / ModelScope | Character animation and replacement |
表源:Wan-Video/Wan2.2 官方 README,Model Download 表格。这里重绘表格并保留原英文表头和 Description。
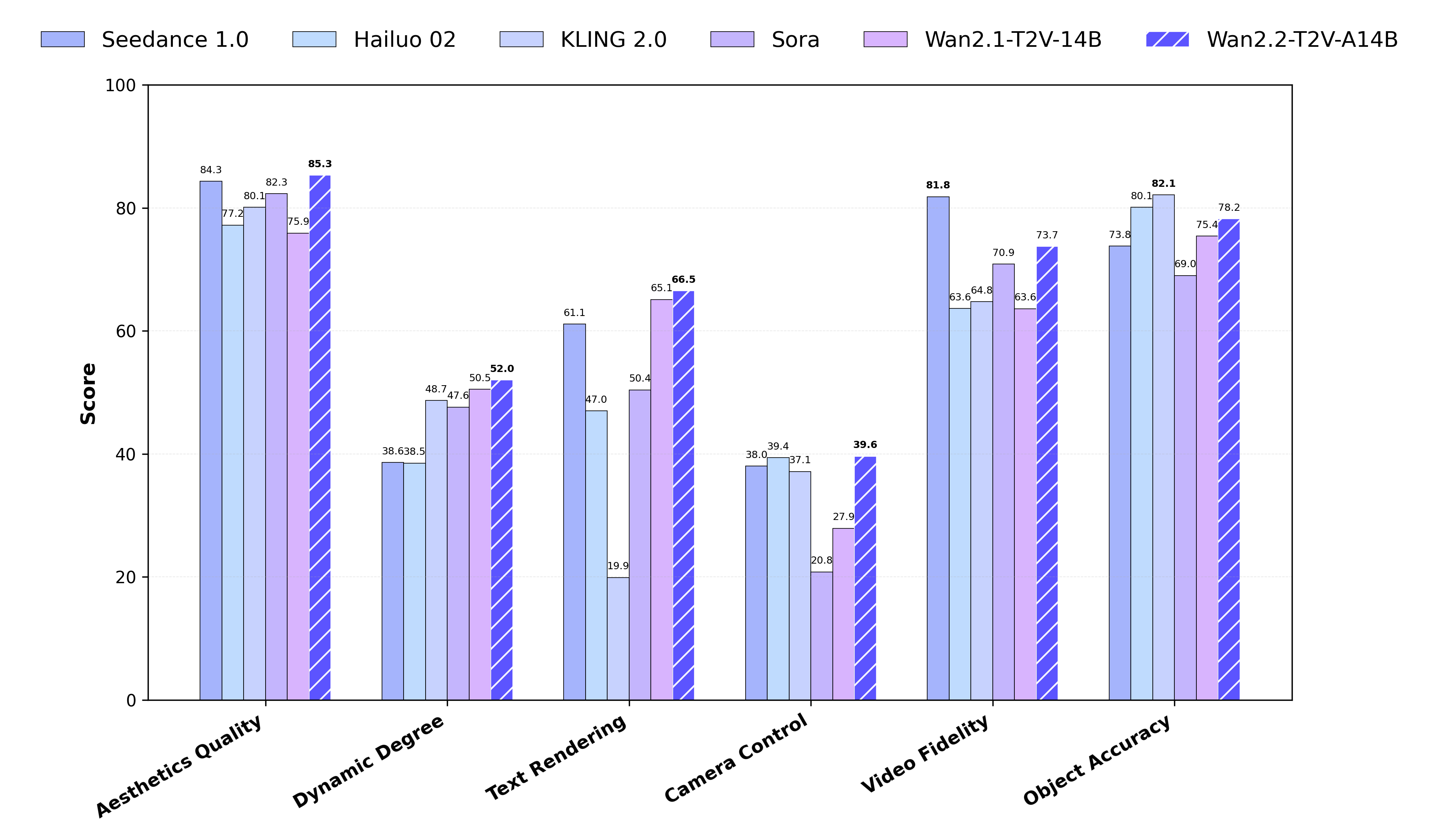
图源:Wan-Video/Wan2.2 官方 README,assets/performance.png。原 README 图意:Wan2.2 在 Wan-Bench 2.0 上与主流闭源商业模型对比。
把 Wan2.1 和 Wan2.2 放在一起看,演进逻辑很清楚:Wan2.1 先证明开放视频 DiT 底座可行,公开了训练和系统方案;Wan2.2 再围绕更大容量但不显著增加每步成本和更高压缩下的 720P 部署继续推进。MoE 是模型容量方向,TI2V-5B 是部署方向。
消融与工程结论
Wan 的消融支持几个可复用判断:
| Question | Wan evidence | Engineering takeaway |
|---|---|---|
| AdaLN 参数是否越多越好 | Full-shared-AdaLN-1.5B 比 Half-shared-AdaLN-1.5B 更低训练 loss;Non-shared-AdaLN-1.7B 也不占优 | DiT 容量更值得放在 depth 和主干表达上,而不是盲目堆每层调制参数 |
| 文本编码器是否必须用 decoder-only LLM | umT5 在收敛和构图上优于 Qwen2.5-7B-Instruct、GLM-4-9B 等方案 | 视频扩散更需要双向文本表征和稳定 cross-attention embedding |
| VAE 能否用 diffusion loss 替代重建目标 | VAE-D 在 T2I FID 上不如常规 VAE | 视频生成底座仍需要强重建、低失真、稳定 latent 空间 |
| 小模型是否有意义 | 1.3B 只需 8.19GB VRAM,VBench 总分 83.96% | 开源生态需要一个可普及的调试和创作模型,不只需要最强 14B |
这些结论都指向同一个系统观:视频生成的质量不是某一个模块单独决定的。数据分布、VAE 压缩、Flow path、DiT 深度、文本编码器、并行策略、推理 cache 和评测权重相互牵制。Wan 报告的价值就在于它把这些接口都讲了出来。
局限
论文也明确给出三类限制。第一,大幅运动中的细粒度细节仍然难保,复杂动作越强,局部纹理和身份一致性越容易受损。第二,14B 模型推理成本仍高;没有额外优化时单卡推理可能接近 30 分钟,因此少步蒸馏、cache、量化和多 GPU 并行仍是必要方向。第三,通用视频底座不自动具备领域专业性,在教育、医疗等专业场景还需要领域数据和安全评测。
对后续研究来说,Wan 提供的是一个开放底座和系统配方,而不是终点。后续的 Wan2.2 MoE、Phased DMD 少步蒸馏、Self Forcing 因果 rollout、LingBot-World 交互世界模拟,都可以看成在这个底座上分别补容量、速度、因果性和动作条件。
读完可以带走什么
Wan 最值得复用的不是某个单点 trick,而是完整训练路线:
- 先把视频 VAE 训练成可扩展、可缓存、时序稳定的 tokenizer;
- 用图像预训练建立文本语义和空间结构,再逐步加入高分辨率视频;
- 在视频 latent 上用 Flow Matching 直接学习速度场;
- 用 full spatio-temporal DiT 承接文本、运动和镜头关系;
- 用 2D Context Parallelism、FSDP、offloading 解决长序列训练;
- 用 diffusion cache、FP8 GEMM 和 8-bit attention 解决推理延迟;
- 用 human-aligned benchmark 把动态质量、画质和指令跟随拆开评估。
如果要把 Wan 当作工程参考,最重要的问题不是“模型有多大”,而是:你的数据过滤、VAE、训练阶段、条件接口和推理预算是否和目标应用一致。视频生成系统的失败往往不是公式错,而是这些接口没有对齐。
- Title: 论文专题讲解:Wan2.1:开源视频生成系统路线
- Author: Charles
- Created at : 2025-10-19 09:00:00
- Updated at : 2025-10-19 09:00:00
- Link: https://charles2530.github.io/2025/10/19/ai-files-paper-deep-dives-diffusion-wan/
- License: This work is licensed under CC BY-NC-SA 4.0.