
论文专题讲解:Depth Anything 3:任意视角的 3D 几何底座
- 论文:
Depth Anything 3: Recovering the Visual Space from Any Views - 系统:
Depth Anything 3 / DA3 - 链接:arXiv:2511.10647
- 项目页:depth-anything-3.github.io
- 代码与模型:ByteDance-Seed/Depth-Anything-3
- 关键词:monocular depth、multi-view geometry、depth-ray representation、Dual-DPT、teacher-student、VGGT、Depth Anything 2
Depth Anything 3 放在具身智能专题里,是因为它补的是机器人闭环最基础的一层:从 RGB、多视角或视频恢复稳定的 3D 几何状态。VLA 可以输出动作,世界模型可以预测未来,但真正执行抓取、导航、避障和视角规划时,系统仍然要知道物体在哪里、相机在哪里、深度是否一致、点云能不能融合。
论文位置
DA3 的主线可以概括成一句话:把 Depth Anything 系列的单目深度能力扩展到任意数量视角,并让输出从一张深度图升级为可融合、可估姿、可渲染的 visual space。
这里有三条前置线索需要先分清:
Depth Anything / DA:核心是强单目深度估计。它把大规模视觉先验转成相对深度,对细节和开放域泛化很强,但主要处理单张图像。Depth Anything 2 / DA2:是 DA 路线的更强版本,也是 DA3 对比和继承的重要对象。DA2 在单目相对深度上很稳,但它本身不解决多视角一致性、相机位姿和点云融合。VGGT:是另一条 feed-forward visual geometry 路线,目标是一次前向预测 camera parameters、depth maps、point maps、tracks 等 3D 属性。DA3 和 VGGT 对的是同一类多视角几何问题,但 DA3 认为更简单的 depth-ray 目标和单个预训练 Transformer 更有效。
所以 DA3 不是简单的 “DA2 + 多图输入”。它更像是把 DA/DA2 的深度细节、VGGT 的任意视角几何目标,以及具身系统需要的相机/点云/3DGS 接口合到了一起。

图源:Depth Anything 3,Figure 1。原论文图意:DA3 接收任意数量图像和可选相机位姿,输出一致的 depth maps 与 ray maps,并进一步融合为点云、相机和 3D Gaussian 表示。
核心表示:Depth + Ray
DA3 最关键的设计不是预测更多任务,而是把预测目标压到最小:每个像素预测 depth,再预测一条 camera ray。
对第 个视角的像素 ,模型输出深度 、ray origin 和 ray direction ,3D 点可以写成:
这比直接预测 point map 或相机矩阵有几个好处。第一,depth 保留了 Depth Anything 系列擅长的局部结构和边界细节。第二,ray map 能隐式表达相机位姿和投影几何,不需要模型直接回归一个必须满足旋转矩阵约束的 pose。第三,depth 与 ray 分开后,给定外部相机位姿时也容易做 pose-conditioned depth,让多视角深度更一致。
论文还说明,ray direction 不做单位归一化,方向向量的尺度会保留投影几何信息。需要显式相机参数时,可以从 ray map 里用 DLT 和 RQ decomposition 恢复相机;工程上则额外提供轻量 camera head,方便直接输出 intrinsics / extrinsics。
架构:单个 DINOv2 + Cross-view Attention + Dual-DPT
DA3 的建模思路很克制。它没有堆两个专用 Transformer,也没有把 camera、depth、point、track 都变成独立复杂任务,而是用一个 vanilla DINOv2 ViT 作为主干。
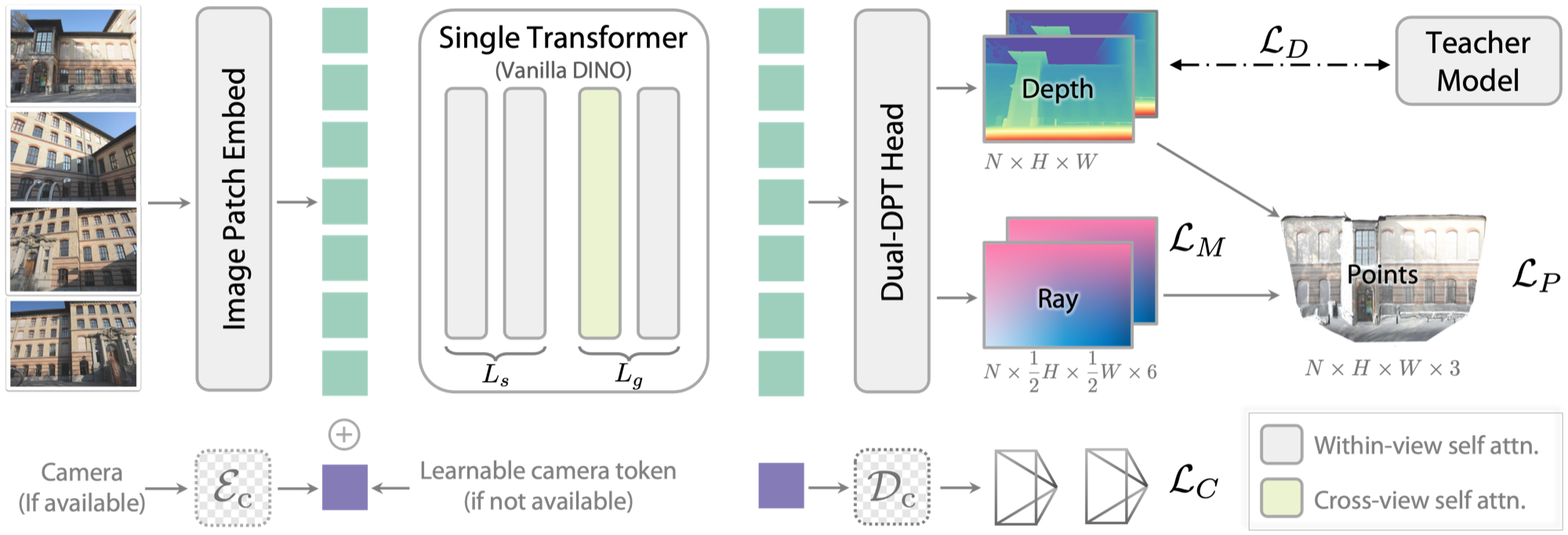
图源:Depth Anything 3,Figure 2。原论文图意:DA3 使用单个 DINOv2 主干,通过 input-adaptive cross-view self-attention 做跨视角推理,再用 Dual-DPT head 输出 depth 与 ray。
架构里有三个容易混淆的点:
- Input-adaptive self-attention:前几层主要做单视角视觉特征提取,后续层按比例插入 cross-view attention。输入只有单张图时,它自然退化成单目深度模型;输入多视角时,同一主干又能跨视角对齐几何。
- Camera token:如果有相机参数,就把 FOV、quaternion、translation 编码成每个视角的 camera token;如果没有,就用可学习 token。camera token 会参与所有 attention,而不是只在输出端做后处理。
- Dual-DPT head:depth 和 ray 共用 DPT reassembly 的一部分,再分成两个分支输出。这样比完全独立 head 更轻,也比单一混合输出更容易分别约束深度细节和相机几何。
图源:Depth Anything 3,Dual-DPT architecture figure。图本身信息密度较低,这里缩小显示,重点看 shared reassembly 与 depth/ray 两个分支的关系。
为什么说它不是 VGGT-style
VGGT 的贡献是把 feed-forward 3D geometry 推到很强的统一接口:输入一组图像,输出相机、深度、点、track 等几何属性。DA3 赞同这个问题设定,但对建模选择有不同判断。
DA3 的消融里,VGGT Style 指使用两个不同 Transformer 组合成更复杂的结构;在近似参数量下,它不如单个完整预训练的 ViT-L 主干。论文的解释是:单个 DINOv2 主干可以完整继承预训练视觉特征,而 VGGT-style 结构里有更多未充分预训练的 block。另一个关键消融是预测目标:depth + ray 明显强于 depth + cam 或 depth + pcd + cam,说明“少而准”的几何目标比把所有显式任务都塞进去更稳。
Table from the paper can be redrawn as follows, keeping the original English fields:
| Methods | HiRoom Auc3 | HiRoom F1 | ETH3D Auc3 | ETH3D F1 | DTU Auc3 | DTU CD | 7Scenes Auc3 | 7Scenes F1 | ScanNet++ Auc3 | ScanNet++ F1 |
|---|---|---|---|---|---|---|---|---|---|---|
| depth + pcd + cam | 9.1 | 12.8 | 19.0 | 60.4 | 42.3 | 4.918 | 20.8 | 43.4 | 22.0 | 43.0 |
| depth + cam | 10.8 | 16.5 | 9.9 | 48.0 | 23.3 | 5.316 | 13.0 | 38.5 | 13.3 | 41.0 |
| depth + ray | 48.7 | 60.3 | 25.5 | 65.4 | 46.5 | 3.919 | 24.0 | 46.5 | 35.5 | 53.4 |
| depth + ray + cam | 37.2 | 45.4 | 22.3 | 59.4 | 56.3 | 3.066 | 25.7 | 45.6 | 34.1 | 56.5 |
表源:Depth Anything 3,ablation of prediction-target combinations。原表要点:在无 camera condition 的设置下,depth + ray 是最核心的预测目标;camera head 有工程便利性,但 ray 本身已经能承载相机几何。
训练:DA2 细节 + 多视角几何
DA3 的训练有两层:先训练一个强单目 teacher,再用 teacher-student 方式训练任意视角 DA3。
Teacher 如何继承又改造 DA2
论文明确说 teacher 是在 Depth Anything 2 路线上扩展出来的,但改了两个关键点。
第一,数据更偏 synthetic geometry。真实 RGB-D、COLMAP 或 LiDAR 深度常常稀疏、噪声大、边界不干净;如果直接监督,会把错误深度也教给模型。因此 teacher 主要用高质量合成数据训练,再给真实数据生成更干净的 relative depth pseudo-label。
第二,表示从 disparity 转向 depth。DA2 常见路线更偏相对深度/视差表达;DA3 teacher 直接预测 scale-shift-invariant depth,并用 exponential depth 改善近处几何分辨率。这个变化在 2D benchmark 上未必看起来特别夸张,但在点云和 3D reconstruction 里更重要,因为近处物体、桌面边缘、机械臂可达区域都会放大几何误差。
Teacher 的目标函数不只是普通 depth loss,还加入 depth-gradient、global-local ranking、surface normal、sky mask、object mask 等约束。直观上说,depth loss 管绝对顺序,gradient 管边界和局部形状,normal 管表面朝向,sky/object mask 管那些普通深度监督很容易出错的区域。
如何把 teacher 用到 DA3
DA3 训练时会遇到一个现实问题:多视角真实数据需要 pose 泛化,但真实深度往往不干净。论文做法是让 teacher 先给出高质量 relative depth,再用 RANSAC scale-shift least squares 把 teacher depth 对齐到 sparse/noisy metric depth。这样得到的监督既保留 teacher 的干净几何,又和真实场景的尺度、pose 更一致。
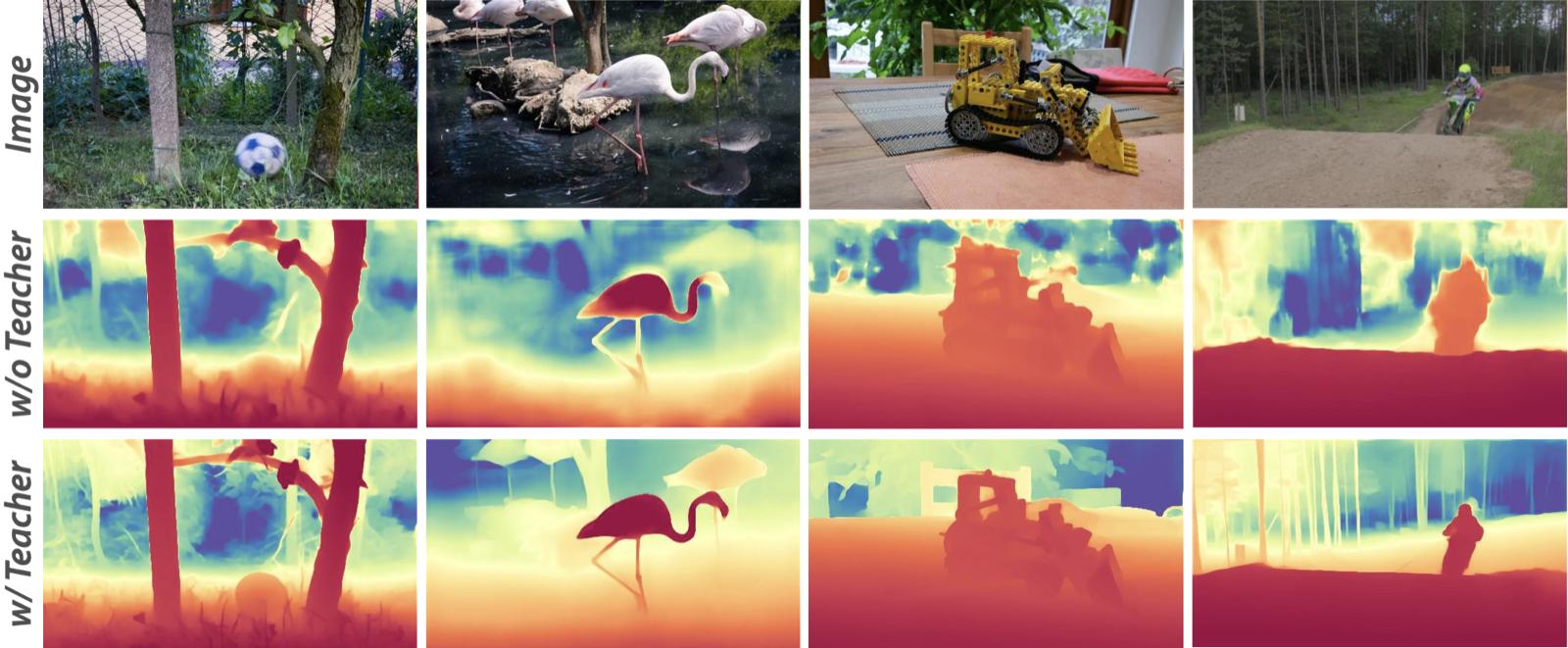
图源:Depth Anything 3,teacher supervision visualization figure。原论文图意:真实深度可能稀疏或噪声明显,teacher 提供更连续的相对深度,再通过 robust alignment 变成可用于 DA3 的监督。
DA3 主模型的 loss 由 depth、ray、point、optional camera、gradient 等部分组成,整体以 L1 类损失为主。训练细节里最值得记的是这些数字:
| Setting | Value |
|---|---|
| Hardware | 128 H100 GPUs |
| Training steps | 200K |
| Warm-up | 8K steps |
| Peak learning rate | 2e-4 |
| Base resolution | 504 x 504 |
| Random resolutions | 504x504, 504x378, 504x336, 504x280, 336x504, 896x504, 756x504, 672x504 |
| Number of views | uniformly sampled from [2, 18] for 504x504 |
| Batch strategy | dynamic batch size to keep token count roughly constant |
| Teacher-label transition | switch from GT depth to teacher labels at 120K steps |
| Pose conditioning | activated with probability 0.2 |
这个 recipe 对具身系统很有启发:多视角几何模型不能只靠“相机参数很准、深度很干净”的理想数据。真正可泛化的训练需要把 synthetic clean geometry、real noisy geometry、teacher pseudo-label、pose conditioning 混起来。
??? info “Training datasets table from the paper”
| Usage | Dataset | #Scenes | Data Type |
| --- | --- | --- | --- |
| Pose-geometry benchmark | HiRoom (ours) | 29 | Synthetic |
| Pose-geometry benchmark | ETH3D | 11 | LiDAR |
| Pose-geometry benchmark | DTU | 22 | LiDAR |
| Pose-geometry benchmark | 7Scenes | 7 | LiDAR |
| Pose-geometry benchmark | ScanNet++ | 20 | LiDAR |
| Pose-geometry Training | AriaDigitalTwin | 237 | Synthetic |
| Pose-geometry Training | AriaSyntheticENV | 99950 | Synthetic |
| Pose-geometry Training | ArkitScenes | 4388 | LiDAR |
| Pose-geometry Training | BlendedMVS | 503 | 3D Recon |
| Pose-geometry Training | Co3dv2 | 30616 | Colmap |
| Pose-geometry Training | DL3DV | 6379 | Colmap |
| Pose-geometry Training | HyperSim | 344 | Synthetic |
| Pose-geometry Training | MapFree | 921 | Colmap |
| Pose-geometry Training | MegaDepth | 268 | Colmap |
| Pose-geometry Training | MegaSynth | 6049 | Synthetic |
| Pose-geometry Training | MvsSynth | 121 | Synthetic |
| Pose-geometry Training | Objaverse | 505557 | Synthetic |
| Pose-geometry Training | Omniobject | 5885 | Synthetic |
| Pose-geometry Training | OmniWorld | 1039 | Synthetic |
| Pose-geometry Training | PointOdyssey | 44 | Synthetic |
| Pose-geometry Training | ReplicaVMAP | 17 | Synthetic |
| Pose-geometry Training | ScanNet++ | 230 | LiDAR |
| Pose-geometry Training | ScenenetRGBD | 16866 | Synthetic |
| Pose-geometry Training | TartanAir | 355 | Synthetic |
| Pose-geometry Training | Trellis | 557408 | Synthetic |
| Pose-geometry Training | vKitti2 | 50 | Synthetic |
| Pose-geometry Training | WildRGBD | 23050 | LiDAR |
模型规模、速度与选择
DA3 不是只发布一个大模型。论文分析表里同时给出 Giant、Large、Base、Small,并和 VGGT 做参考比较。
| Model | Max # of Images | Backbone | DualDPT | CameraHead | Running Speed |
|---|---|---|---|---|---|
| VGGT(Reference) | 400-500 | 0.91B | 0.064B | 0.22B | 34.1 FPS |
| DA3-Giant | 900-1000 | 1.130B | 0.050B | 0.018B | 37.6 FPS |
| DA3-Large | 1500-1600 | 0.300B | 0.047B | 0.008B | 78.37 FPS |
| DA3-Base | 2100-2200 | 0.086B | 0.015B | 0.004B | 126.5 FPS |
| DA3-Small | 4000-4100 | 0.022B | 0.003B | 0.001B | 160.5 FPS |
表源:Depth Anything 3,model analysis table。原表要点:DA3 的小模型能处理更多图像并有更高吞吐,Giant 则追求更强几何质量;实际部署还要看分辨率、显存、输出格式和是否启用 3DGS。
对具身工程来说,可以这样选:
- 离线资产重建、数据标注、仿真场景几何补全:优先看
DA3-Giant、DA3-Large或 nested 模型。 - 单目 metric depth 或在线感知辅助:先看
DA3Metric-Large、DA3-Base、DA3-Small,再按延迟和显存调分辨率。 - 长视频、巡检、移动机器人记录流:关注
DA3-Streaming,它用 chunk streaming 管理长序列显存,但它仍然是几何感知管线,不等价于完整 SLAM 系统。
GitHub 仓库怎么读
官方仓库不是只放权重链接,而是提供了比较完整的工具链。
Model Zoo 分成三类:Main Series 处理 any-view geometry,Metric Series 面向单目 metric depth,Monocular Series 面向高质量相对单目深度。README 还提醒,带 -1.1 后缀的 refreshed checkpoints 修复了训练 bug,街景等场景通常应优先使用新版权重。
Python API 的核心接口是 DepthAnything3.from_pretrained(...).inference(...),输入可以是图片路径、PIL 或 numpy array;可选传入 extrinsics 和 intrinsics 做 pose-conditioned depth。输出对象里包含 processed_images、depth、conf、extrinsics、intrinsics 等字段。工程上最常用的几个开关是:
use_ray_pose=True:从 ray head 推 pose,通常更准但稍慢;ref_view_strategy="middle":视频序列常用中间帧作为参考视角;export_format="mini_npz-glb-depth_vis-feat_vis":按需要导出 npz、glb、深度可视化或特征可视化;infer_gs=True:启用 Gaussian Splatting 分支,主要用于支持 GS 的模型和导出格式。
CLI 则更适合批处理:可以对图片集、视频帧目录或机器人采集序列直接导出 glb、ply、npz、depth images、3DGS video 等结果。对具身数据管线来说,这意味着 DA3 可以作为“把 RGB 轨迹转成几何资产”的中间层:先跑 DA3 得到 depth / pose / point cloud,再交给抓取候选生成、可达性检查、仿真资产构建或数据质检。
DA3-Streaming 是仓库里值得单独看的部分。它基于 DA3 和 VGGT-Long 思路,用滑窗 chunk 处理超长视频,输出 camera_poses.txt、intrinsic.txt 和融合点云。README 报告在 A100 上接近 10 FPS 的视频处理速度,并给出 KITTI / TUM RGB-D 的 ATE RMSE 对比。这个模块的意义不是替代成熟 SLAM,而是把 DA3 的几何先验变成更适合长序列工程处理的形态。
对具身智能的启发
DA3 对机器人和 VLA 的价值,不是让模型“看图更清楚”这么泛。它把三类接口变得更直接:
- 感知状态接口:depth、confidence、camera pose、point cloud 可以进入 grasping、navigation、tracking 和 safety checker。
- 数据生产接口:真实机器人视频、仿真渲染、多相机采集可以被转成统一几何资产,方便后续标注和失败回放。
- 世界模型接口:视频世界模型如果只生成 RGB,仍然难以判断物理可达性;DA3 这类几何底座可以把未来帧或历史帧补成 depth / pose / 3D state,让规划器有更多可验证信号。
也要注意边界。DA3 不直接输出机器人动作,也不解决接触动力学、力控、安全策略和长时记忆。它更像具身系统里的几何传感与重建层:给 VLA、WAM、planner 和仿真器提供更可靠的空间状态。
参考链接
- Title: 论文专题讲解:Depth Anything 3:任意视角的 3D 几何底座
- Author: Charles
- Created at : 2025-10-21 09:00:00
- Updated at : 2025-10-21 09:00:00
- Link: https://charles2530.github.io/2025/10/21/ai-files-paper-deep-dives-embodied-ai-depth-anything-3/
- License: This work is licensed under CC BY-NC-SA 4.0.