
论文专题讲解:SpatialVLA:3D 空间表征接入 VLA
- 论文:
SpatialVLA: Exploring Spatial Representations for Visual-Language-Action Models - 链接:arXiv:2501.15830
- 项目页:spatialvla.github.io
- 关键词:Ego3D Position Encoding、Adaptive Action Grids、spatial action tokens、cross-embodiment VLA
SpatialVLA 适合放在具身智能专题里的原因很明确:它不是单纯把 VLM 做大,而是问 VLA 最根本的空间问题:不同机器人相机安装不同、动作空间不同,模型怎样学到可迁移的 3D 空间动作知识?
论文位置
很多 VLA 方法把图像 token、语言 token 和动作 token 接起来,但 RGB 图像本身是 2D 投影。对抓取、放置、插入、避障来说,模型需要知道物体在 3D 空间里在哪里,动作又要把末端执行器带到哪里。
SpatialVLA 的方案是两边一起改:
- 输入侧加入
Ego3D Position Encoding; - 输出侧用
Adaptive Action Grids把连续动作离散成空间 action tokens。
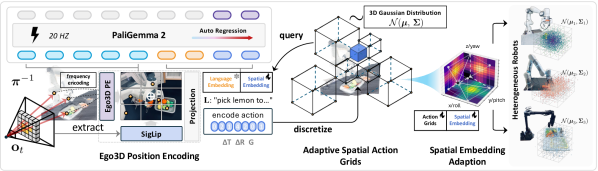
Figure source: SpatialVLA, Figure 1. 原论文图意:SpatialVLA 在视觉语言模型上加入 Ego3D position encoding 和 adaptive action grids,把 3D 空间上下文和动作 token 接入 VLA。
Ego3D Position Encoding
Ego3D 的直觉是:不要先追求全局世界坐标一致,而是在每个相机自己的 egocentric coordinate system 里恢复 3D 位置。这样可以减轻不同机器人相机外参不一致的问题。
流程可以写成:
1 | RGB image |
论文使用 ZoeDepth 估计 depth,再用相机内参反投影得到像素的 3D position。注意这里仍然需要 intrinsics,但不依赖跨机器人统一的 camera extrinsics。这一点和具身智能里的相机标定章节正好衔接:内参用于像素到相机坐标反投影,外参则在跨机器人泛化时往往难以统一。
Adaptive Action Grids
动作侧,SpatialVLA 不直接预测连续 ,而是根据数据集中动作分布,把 translation / rotation movement 离散成 adaptive spatial grids。
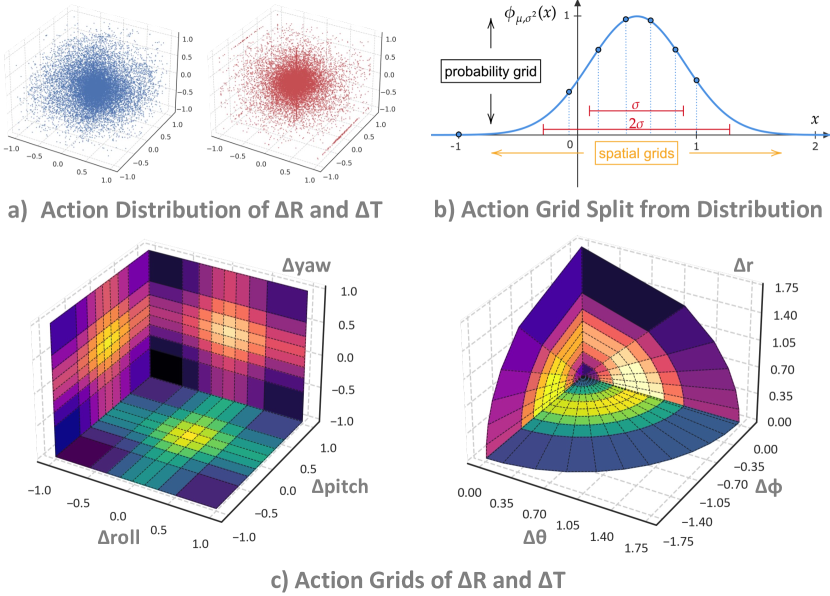
Figure source: SpatialVLA, Figure 2. 原论文图意:Adaptive action grids 先统计 translation 和 rotation action movement 的分布,再根据 Gaussian fitting 对每个动作变量划分等概率区间,形成空间动作 token。
| Design | Why it matters |
|---|---|
Normalize action variables to [-1, 1] |
消除不同机器人动作尺度差异 |
| Fit Gaussian distribution over action movement | 让网格跟真实动作分布对齐 |
| Split grids with equal probability | 高频动作区域更细,低频区域更粗 |
| Generate only 3 tokens per step | 比 RT-1 / RT-2 / OpenVLA 常见 7-token 动作更轻 |
| Re-discretize for new robots | 方便 post-training 适配新 embodiment |
这条路线的关键不是“离散化一定比连续动作好”,而是让动作 token 与物理空间统计对齐,减少跨 embodiment 动作空间错位。
训练数据和评测设置
论文先在约 1.1M real-world robot dataset 上预训练,数据混合由 OXE 和 RH20T 子集组成,并参考 OpenVLA 的 mixture weight 做修改。

Figure source: SpatialVLA, Figure 3. 原论文图意:评测覆盖 7 robot learning scenarios、24 real-robot tasks 和 3 simulation environments,关注 zero-shot control、new setup adaptation 和 spatial understanding。
论文附录还给出了 dataset mixture 可视化:
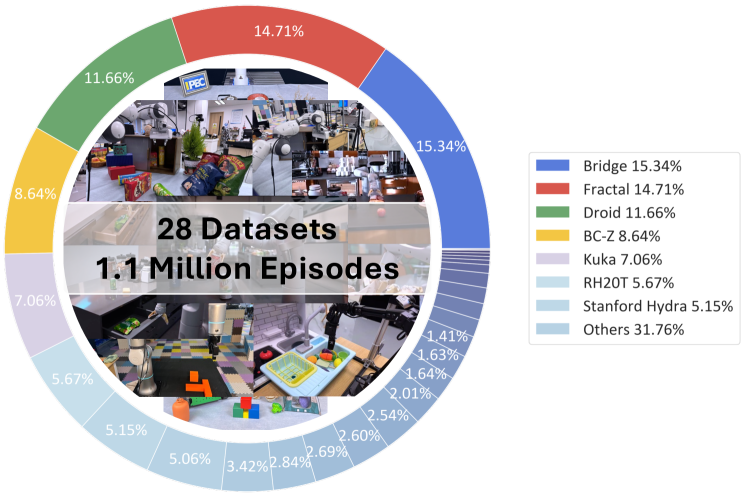
Figure source: SpatialVLA, Figure 8. 原论文图意:展示 SpatialVLA 训练数据混合的来源分布。
实验结论
SpatialVLA 的评测不是只看一个 benchmark,而是分三类:
- zero-shot control:SimplerEnv 和 real-world WidowX;
- new setup adaptation:LIBERO 和 Franka 新设置;
- spatial understanding:需要空间关系理解的真实任务和 LIBERO-Spatial。
Table III from the paper can be redrawn as follows, keeping the original English fields:
| Method | LIBERO-Spatial SR ↑ | LIBERO-Spatial Rank ↓ | LIBERO-Object SR ↑ | LIBERO-Object Rank ↓ | LIBERO-Goal SR ↑ | LIBERO-Goal Rank ↓ | LIBERO-Long SR ↑ | LIBERO-Long Rank ↓ | Average SR ↑ | Average Rank ↓ |
|---|---|---|---|---|---|---|---|---|---|---|
| Diffusion Policy from scratch | 78.3 ± 1.1% | 5 | 92.5 ± 0.7% | 1 | 68.3 ± 1.2% | 5 | 50.5 ± 1.3% | 5 | 72.4 ± 0.7% | 5 |
| Octo fine-tuned | 78.9 ± 1.0% | 4 | 85.7 ± 0.9% | 4 | 84.6 ± 0.9% | 1 | 51.1 ± 1.3% | 4 | 75.1 ± 0.6% | 3 |
| OpenVLA fine-tuned | 84.7 ± 0.9% | 2 | 88.4 ± 0.8% | 3 | 79.2 ± 1.0% | 2 | 53.7 ± 1.3% | 3 | 76.5 ± 0.6% | 2 |
| TraceVLA fine-tuned | 84.6 ± 0.2% | 3 | 85.2 ± 0.4% | 5 | 75.1 ± 0.3% | 4 | 54.1 ± 1.0% | 2 | 74.8 ± 0.5% | 4 |
| SpatialVLA fine-tuned | 88.2 ± 0.5% | 1 | 89.9 ± 0.7% | 2 | 78.6 ± 0.6% | 3 | 55.5 ± 1.0% | 1 | 78.1 ± 0.7% | 1 |
表源:SpatialVLA,Table III。原表含义:LIBERO Simulation Benchmark Results,汇报四个 task suites 的 success rate 和 rank,并对三次随机种子、500 trials 求均值。关键点是 SpatialVLA 的平均成功率最高,尤其在 LIBERO-Spatial 和 LIBERO-Long 上排名第一;这比单纯“加深度”更具体地说明 3D spatial encoding 对空间关系和长链任务都有帮助。
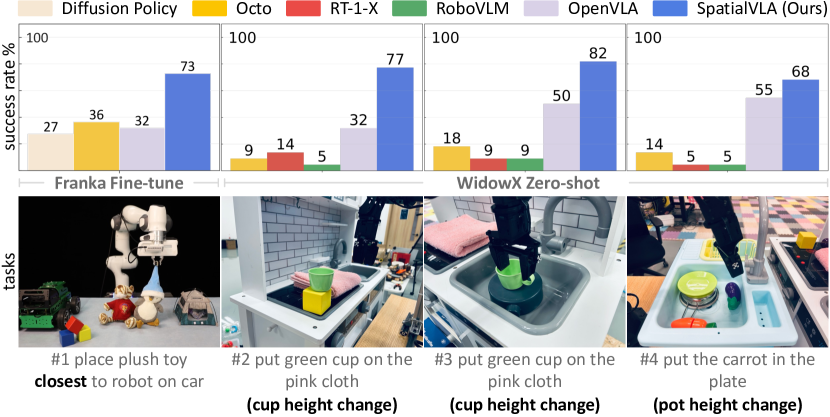
Figure source: SpatialVLA, Figure 6. 原论文图意:展示 SpatialVLA 在空间提示和复杂空间布局任务上的评测,说明 Ego3D position encoding 对 spatial understanding 有帮助。
论文里几个关键结论:
| Question | Reported takeaway |
|---|---|
| Does 3D spatial input help? | Ego3D improves spatial prompt following and object-layout tasks |
| Does adaptive action tokenization help? | Spatial action grids improve transfer and action representation |
| Can it adapt to new robots? | Re-discretizing spatial grids helps new robot setup adaptation |
| Is LoRA useful? | In small-data LIBERO tasks, LoRA fine-tuning outperforms full fine-tuning |
附录提到的训练消融也很实用:pre-training ablations 在 Google Fractal + BridgeData V2 mixture 上从 scratch 训练,使用 8 A100 GPUs、batch size 128、120K steps。这说明论文并不只是在大型模型上报结果,也尝试拆分空间表示和动作网格的贡献。
对具身智能的启发
SpatialVLA 提醒我们:VLA 的泛化问题不只是语言模型大小问题。跨机器人泛化至少有三层错位:
- 观测错位:相机位置、视角、内外参不同;
- 动作错位:自由度、控制器、工作空间不同;
- 数据错位:任务分布、采集协议和动作统计不同。
Ego3D 和 adaptive action grids 分别处理前两层。它不是最终答案,但给后续 VLA 设计一个明确方向:把 3D 空间和动作坐标系当成模型接口的一部分,而不是后处理细节。
局限
SpatialVLA 仍然依赖深度估计质量。单目深度在透明、反光、低纹理或尺度异常物体上会偏;长时任务也不是它的主要强项。论文里 LIBERO-Long 表现仍受限,说明空间表示能补几何,但不能自动解决长时记忆和任务规划。
参考链接
- Title: 论文专题讲解:SpatialVLA:3D 空间表征接入 VLA
- Author: Charles
- Created at : 2025-11-01 09:00:00
- Updated at : 2025-11-01 09:00:00
- Link: https://charles2530.github.io/2025/11/01/ai-files-paper-deep-dives-embodied-ai-spatialvla/
- License: This work is licensed under CC BY-NC-SA 4.0.