
论文专题讲解:Fast-FoundationStereo:实时 Zero-Shot 双目匹配
这页先按“论文证据节点”读:先问它解决哪一个瓶颈,再看核心图表、实验 setting 和不能外推的边界。背景概念先回 论文专题讲解 和 推理。
前置:不必先读完所有相关论文,但要知道本篇的输入、训练/推理路径和评测口径分别对应什么。
主线关系:读完后把结论回填到「推理」路线里,判断它改变的是机制、成本、数据配方、评测口径,还是仍停留在前沿假设。
- 论文:
Fast-FoundationStereo: Real-Time Zero-Shot Stereo Matching - 链接:arXiv:2512.11130
- 项目页:Fast-FoundationStereo
- 代码与数据:GitHub: NVlabs/Fast-FoundationStereo
- 关键词:stereo matching、zero-shot generalization、foundation model acceleration、knowledge distillation、blockwise NAS、structured pruning、pseudo-labeling、real-time perception
这篇论文解决的是一个很典型的高效推理矛盾:强泛化的 stereo foundation model 太慢,实时 stereo 网络又常常依赖目标域微调,泛化不稳。
Fast-FoundationStereo 的路线不是从零设计一个小模型,而是从 FoundationStereo 出发,把它的三个主要瓶颈分别拆开处理:feature backbone 用蒸馏压缩,cost filtering 用分块 NAS 找低延迟结构,disparity refinement 用结构化剪枝压掉冗余,再用 1.4M in-the-wild stereo pseudo labels 补真实数据分布。
一句话概括:它把一个慢但泛化强的双目基础模型,拆成可训练、可搜索、可剪枝的实时感知模型。
它的效率贡献是什么
| Dimension | Fast-FoundationStereo |
|---|---|
| Saved cost | Stereo perception latency、feature extraction cost、cost filtering cost、iterative refinement cost |
| Main idea | Divide-and-conquer acceleration of FoundationStereo: distill backbone, search cost filtering blocks, prune refinement GRU |
| Training role | Teacher-student feature distillation, blockwise distillation for NAS candidates, refinement retraining, pseudo-labeled in-the-wild data |
| Inference role | Real-time zero-shot stereo matching for robotics / AR / embodied perception, with TensorRT path further reducing latency |
| Main result | More than 10x faster than FoundationStereo while keeping close zero-shot accuracy |
| Main risk | It inherits teacher limitations, especially challenging translucent / non-Lambertian surfaces; pseudo-label quality gates become part of the model |
| Connect to | 推理系统路线图、相机、深度与机器人视觉、具身部署模式与安全案例 |
这里的“推理”不是 LLM decode,而是实时机器人/AR 感知里的 dense stereo depth 推理。它很适合放进高效推理专题,因为它展示了另一类 foundation model acceleration:不是只做量化或 kernel,而是把大模型里的不同阶段拆开,用不同的训练和搜索手段分别降成本。
证据等级与外推边界
| 论文结论 | 证据来源 | 证据等级 | 可外推到高效推理 | 不能直接外推 |
|---|---|---|---|---|
| FoundationStereo 可以被系统性加速到实时 | Figure 2、Table 1、Table 5、runtime decomposition | Benchmark + system profiling | 强 teacher 不一定要整块部署,可以按瓶颈拆成可蒸馏/可搜索/可剪枝模块 | 不能说明所有 vision foundation models 都能无损压到实时 |
| Backbone 蒸馏保留 monocular + stereo priors | Figure 4、Table 3 | Mechanism + ablation | 先让 student 继承 teacher 的中间表征,比直接训练小 backbone 更稳 | 不能保证目标域外所有几何 cue 都被 student 保留 |
| Cost filtering 更适合分块 NAS,而不是直接剪枝 | Figure 8、Figure 11、supplement search-space details | Architecture search evidence | 小通道 cost volume 模块未必有足够剪枝冗余,搜索替代块可能更好 | NAS proxy 仍然只是局部替换近似,不等价于全空间端到端搜索 |
| Refinement GRU 存在可剪冗余 | Figure 5、Figure 9、Figure 12 | Pruning + retraining evidence | 对迭代 refinement 模块,结构化剪枝可以转成真实硬件收益 | 过高 pruning ratio 会让迭代 refinement 容量不足 |
| 伪标签真实数据提升 zero-shot 泛化 | Figure 6、Figure 15、pseudo-label ablation | Data pipeline + ablation | 高效模型不能只压结构,还要补真实分布数据和质量门禁 | pseudo-label teacher 错误会被学生继承,需要持续过滤和验收 |
对本站主线来说,最值得吸收的是“拆瓶颈”的工程方式。它没有把加速压成一个统一 trick,而是承认 feature、cost volume、refinement 三个阶段的冗余形态不同,所以分别用蒸馏、搜索和剪枝。
论文位置
双目匹配要从左右相机图像估计 disparity,再转成深度。它在机器人、AR、自动驾驶和工业感知里很常见,因为 stereo camera 可以给出稠密几何信号。
问题在于,近年来强泛化 stereo 模型开始借用视觉基础模型,例如 DepthAnythingV2、DINO 或复杂 Transformer cost reasoning。它们 zero-shot 很强,但推理太慢。传统实时 stereo 网络虽然快,却往往靠 SceneFlow 或目标域数据训练,遇到真实世界里的反光、透明、纹理少、光照复杂场景时容易掉。
Fast-FoundationStereo 想填中间空白:
1 | FoundationStereo 的强泛化 |
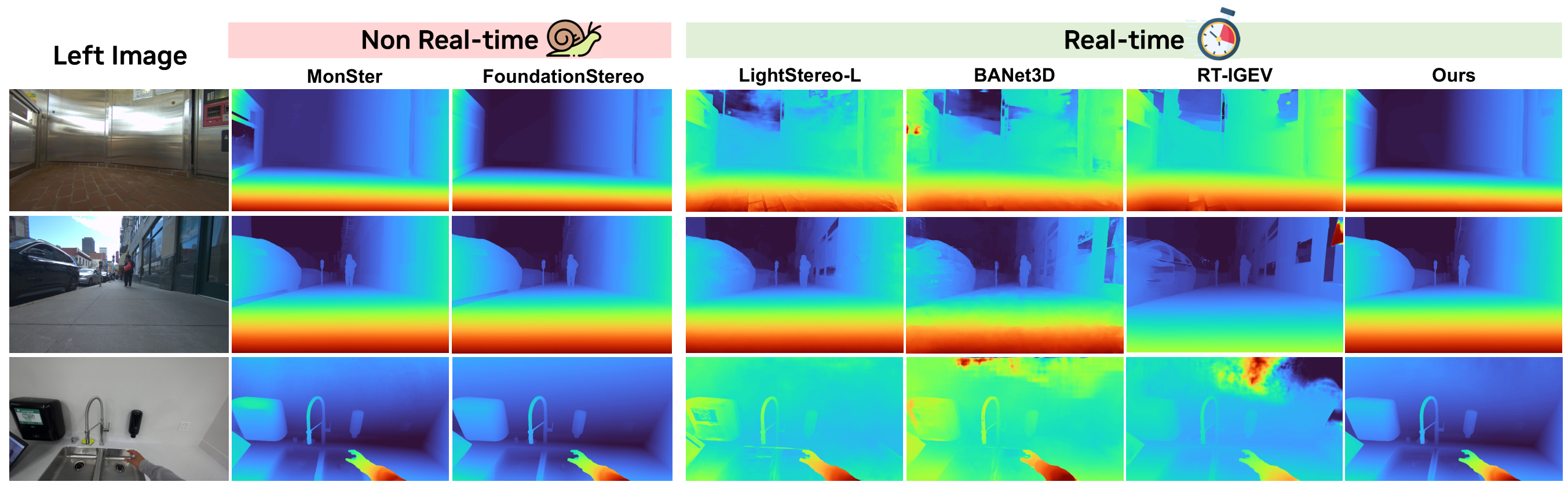
图源:Fast-FoundationStereo,Figure 1。原论文图意:Fast-FoundationStereo 在 in-the-wild stereo images 上接近 MonSter 和 FoundationStereo 的 disparity 质量,同时运行速度接近实时方法。
输入输出:输入是双目图像和 foundation stereo backbone,输出是 disparity/depth 与裁剪后的 refinement 路径。
效率机制:用蒸馏、剪枝和迭代裁剪减少双目匹配的实时推理成本。
对主线意义:几何估计可以服务具身/世界模型状态层,但仍是感知模块。
不能证明什么:实时深度不能证明动作策略、接触动力学或闭环安全已经成立。
横向看每一行,左侧是输入图像,后面是不同方法的 disparity map。论文想表达的不是“每个像素都赢过 teacher”,而是 Fast-FoundationStereo 能明显好于传统实时模型,并接近 FoundationStereo / MonSter 这类慢模型。
对推理系统来说,这张图的价值在于提醒我们:实时化不能只看 latency。如果几何边界、透明区域和弱纹理区域全部坏掉,快也没有用。Fast-FoundationStereo 的目标是把 latency 拉下来,同时保住足够的 zero-shot 几何可靠性。
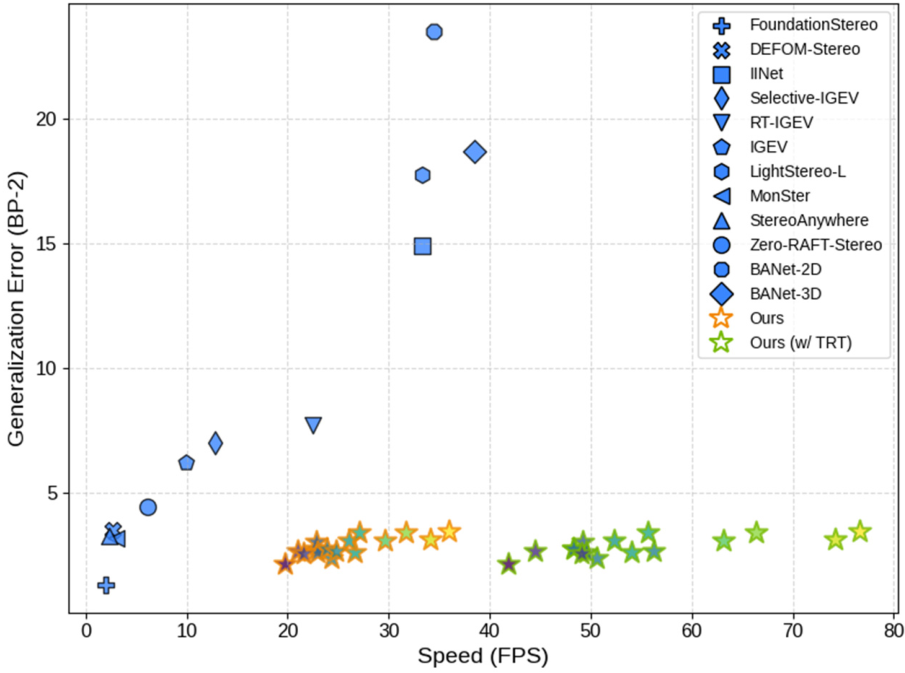
图源:Fast-FoundationStereo,Figure 2。原论文图意:在 NVIDIA 3090 上,比较不同 stereo 方法在 Middlebury-Q 上的 zero-shot generalization error 和 speed;Fast-FoundationStereo model family 进入实时区域,TensorRT 版本进一步加速。
这张 scatter 是整篇论文的定位图。左上是慢且错,右下是快且准。FoundationStereo 精度强但速度慢;传统实时方法速度快但 zero-shot error 高;Fast-FoundationStereo 试图把点推到右下区域。
总体框架
论文把 FoundationStereo 拆成三段:
| Stage | Teacher bottleneck | Acceleration method | Why this method |
|---|---|---|---|
| Feature extraction | DepthAnything V2 + side-tuning CNN is expensive | Knowledge distillation into one student backbone | Backbone architecture is mature, teacher features are good supervision |
| Cost filtering | 3D hourglass + Disparity Transformer is heavy | Blockwise NAS with distillation and ILP search | Direct pruning hurts because cost volume channels are already small |
| Disparity refinement | ConvGRU iterative refinement has redundancy | Structured pruning + retraining | Iterative update module has repeated channels and recurrent dependencies |
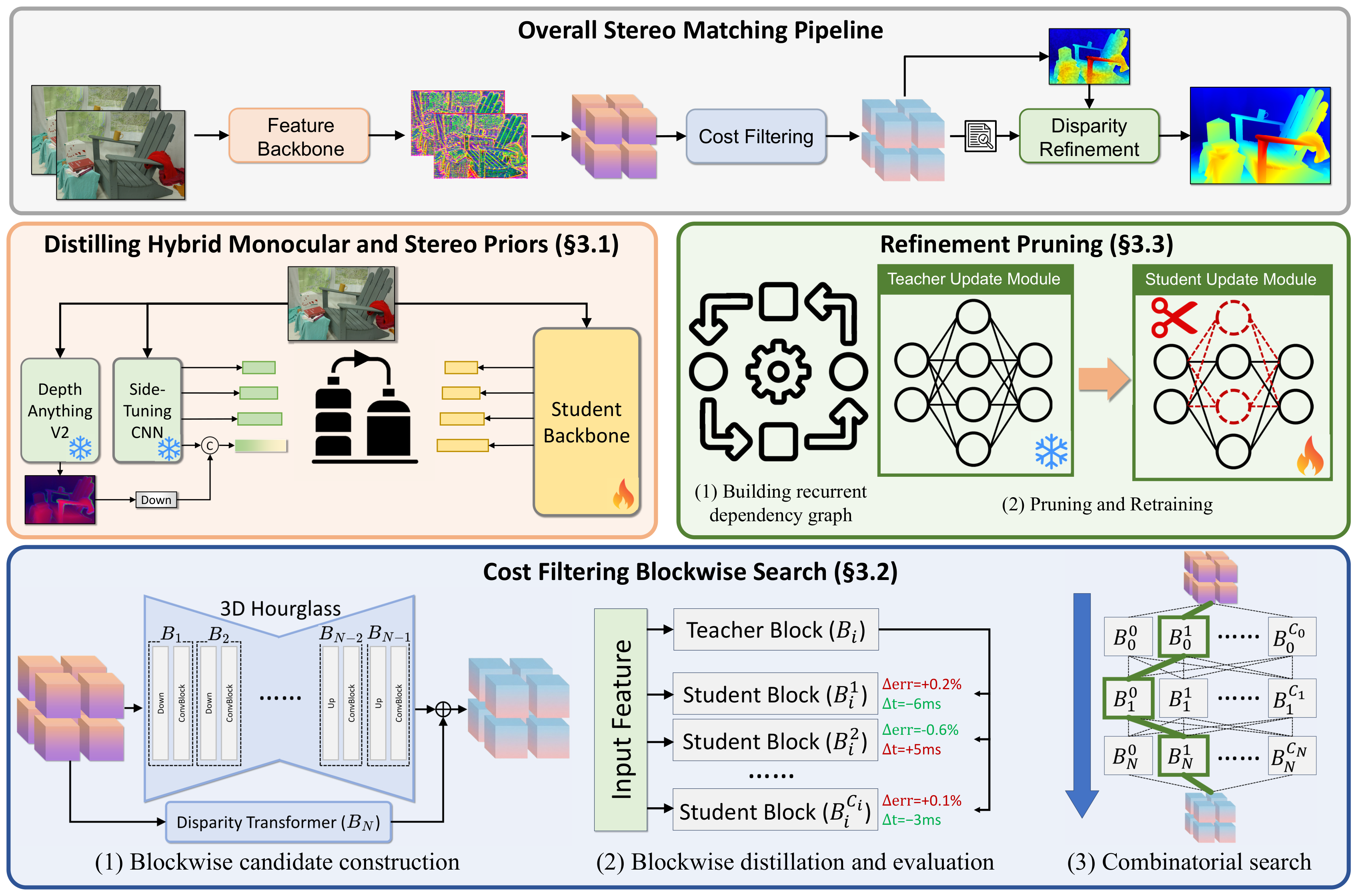
图源:Fast-FoundationStereo,Figure 3。原论文图意:FoundationStereo pipeline 包含 feature extraction、cost filtering 和 disparity refinement;论文分别用 hybrid prior distillation、cost filtering blockwise search、refinement pruning 三条路线加速。
这张图的关键是“不要用同一种压缩方法打所有模块”。feature backbone 适合蒸馏,因为 teacher 的 multi-level features 可以直接当监督;cost filtering 适合搜索,因为模块结构空间大,直接剪小通道 cost volume 不划算;refinement 适合剪枝,因为 ConvGRU 重复迭代里存在结构冗余。
第一段:Backbone 蒸馏
FoundationStereo 的 backbone 把 DepthAnything V2 和 side-tuning CNN 组合起来。DepthAnything V2 提供大规模 monocular prior,side-tuning CNN 把单目先验适配到 binocular stereo 设置。这很强,但也是很重的推理瓶颈。
Fast-FoundationStereo 用一个 student backbone 替换这套双模块。训练时:
- 冻结 FoundationStereo 里的 DepthAnything V2 和 side-tuning CNN;
- teacher 对左右图像产生 multi-level feature pyramid;
- student 学这些 feature,主损失是 MSE;
- 如果 channel dimension 不一致,加 linear projection 对齐;
- 虽然每个 feature extractor 只看单张图,训练 batch 仍放入左右 stereo images,以保留 stereo pair 的统计相似性。
公式上,可以把 teacher feature 记作 ,student feature 记作 ,蒸馏目标就是让多个 pyramid level 的 feature 接近:
其中 是必要时加入的 projection。
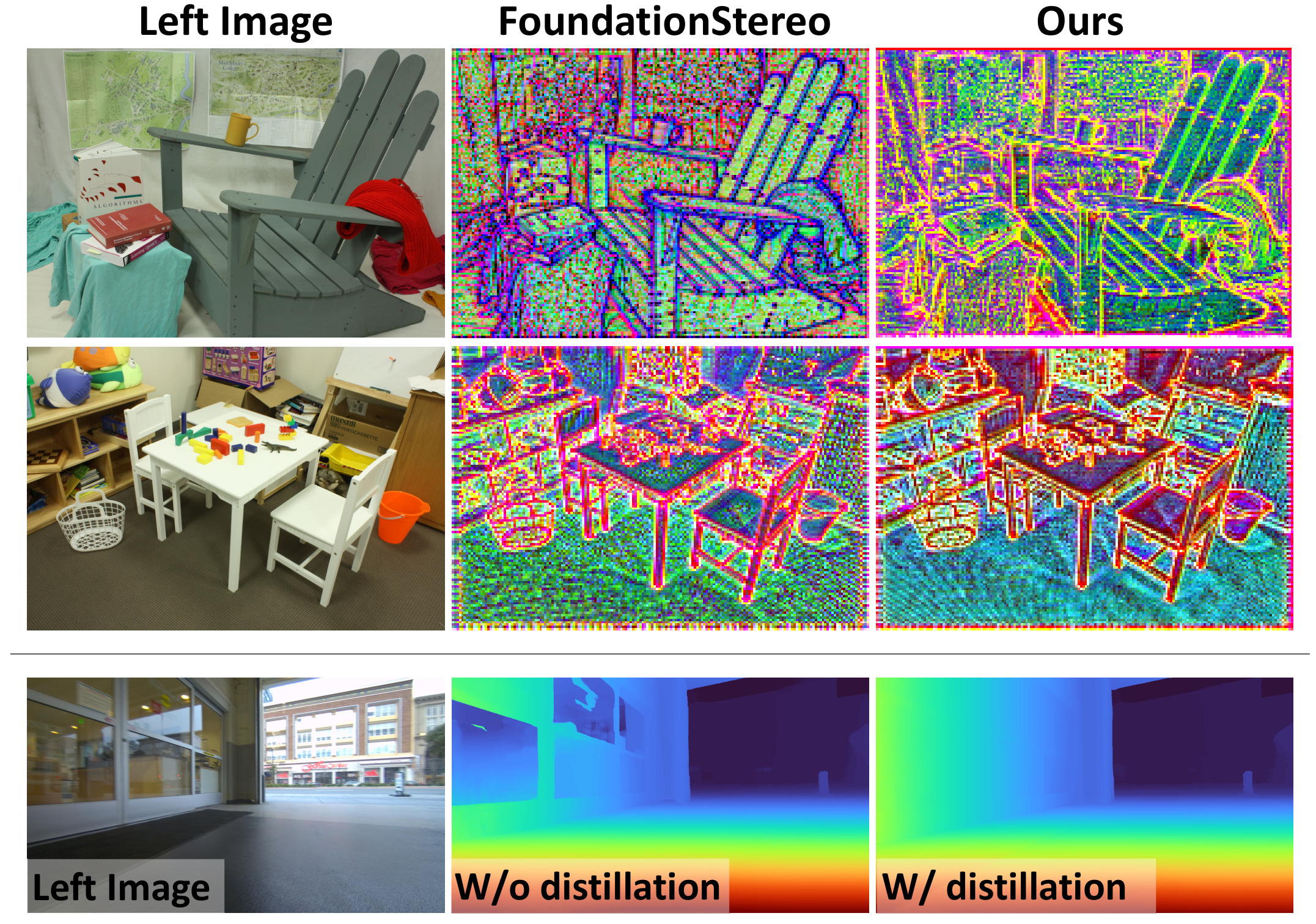
图源:Fast-FoundationStereo,Figure 4。原论文图意:上半部分展示 student backbone 蒸馏后能捕捉类似 teacher 的高频边缘和相对深度;下半部分展示 distillation 对 translucent 场景更稳。
论文明确提到直接剪 teacher 有两个问题。第一,DepthAnything V2 的 ViT 本身仍然是瓶颈,剪外层很难摆脱双模块结构;第二,如果破坏 teacher 的大规模视觉先验,想恢复精度可能需要互联网级图像重新训练。蒸馏成单一 backbone 更像“继承能力后换执行形态”。
Table 3 给出了 backbone distillation 的消融,下面保留原论文英文表头。
| Variants | Midd.-H BP-2 | ETH3D BP-1 | KITTI-12 D1 | KITTI-15 D1 |
|---|---|---|---|---|
| No Distillation | 2.87 | 2.11 | 2.67 | 4.32 |
| Cosine Similarity | 2.29 | 1.19 | 2.39 | 3.31 |
| MSE (Ours) | 2.20 | 1.22 | 2.35 | 3.25 |
表源:Fast-FoundationStereo,Table 3。原论文表意:相比不做蒸馏,feature distillation 明显改善 zero-shot generalization;MSE 在多数指标上最好。
第二段:Cost Filtering 分块搜索
Stereo matching 的核心不是只看左右图像特征,还要构造 cost volume 并判断哪些 disparity 合理。论文里 cost volume 写作:
其中 是 maximum disparity。FoundationStereo 使用双分支 cost filtering:一边是带 Axial-Planar Convolution 的 3D hourglass,一边是 Disparity Transformer,对 4D cost volume 做长程上下文推理。
这部分不能简单剪枝。论文的解释很实在:cost volume 的 channel dimension 多数已经小于 100,直接 structured pruning 只会拿到很小速度收益,却可能明显伤精度。因此它改用 blockwise NAS。
搜索空间
Cost filtering module 被拆成 个 blocks。候选 layer 包括:
| Candidate layer type | Search detail |
|---|---|
| 3D conv layer | Output channels are 0.5x, 1x or 2x; kernel size is 3; BN and activation optional |
| 3D deconv layer | Used for spatial upsampling, following FoundationStereo counterparts |
| APC layer | Output channels are 0.5x or 1x; axial kernel from {3, 9, 17}; planar kernel is 3 |
| Residually connected 3D conv layers | ResNet-style two conv layers, output channels 0.5x or 1x |
| Feature guided volume excitation | Left image multi-level unary features guide cost-volume excitation |
| Disparity Transformer block | Encoder repeats from 1 to 6; FFN hidden dimension is 2x or 4x; heads are 2 or 4 |
Appendix 里给出的数量很关键:
| Search item | Value |
|---|---|
| Number of blocks | N = 8 |
| Full cost filtering designs | 5.5 x 10^24 |
| Faster-than-teacher combinations | 5.8 x 10^19 |
| Blocks actually trained | 2584 |
| Blockwise distillation compute | 14 days on 128 NVIDIA A100 GPUs |
| ILP solve time | Under a second |
| Latency budget for Table 1 model | Delta tau = -0.04s |
这就是 blockwise search 的意义:不是训练 个完整网络,而是把候选 block 单独蒸馏、单独评估,再用 ILP 组合。
Blockwise distillation
对第 个 block,teacher counterpart 记作 ,student candidate 记作 。训练目标是:
其中 来自前一个 teacher block 的输出。最后一个预测 initial disparity 的 block 额外用 smooth 对 ground truth disparity 做监督。teacher 在整个 block distillation 过程中冻结。
每个候选 block 训练完后,论文把它替换进完整 teacher model 的对应位置,在 validation dataset 上端到端跑一遍,记录:
| Measured quantity | Meaning |
|---|---|
| Relative error metric change caused by candidate | |
| Runtime change caused by candidate |
然后用 ILP 找组合:
这里 是 one-hot candidate selection, 是相对 teacher 的 runtime budget。
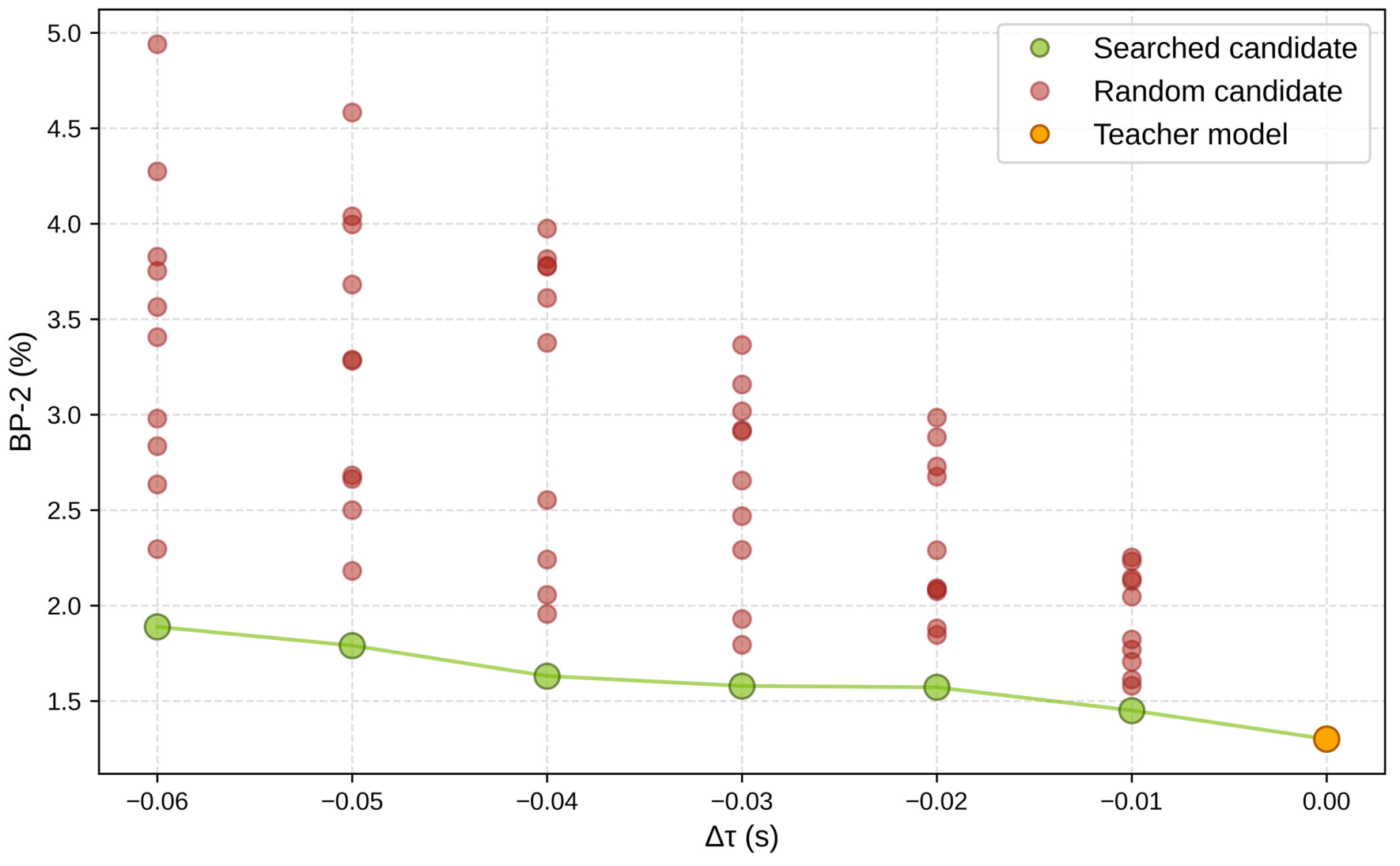
图源:Fast-FoundationStereo,Figure 8。原论文图意:在不同 latency budget 下,searched candidate 稳定优于 random candidate,说明 blockwise proxy + ILP search 能找到更好的 cost filtering 结构。
普通 NAS 要在完整网络里反复训练/评估候选结构,成本太高。这里的技巧是把 teacher block 当局部监督,把全局搜索转成“局部误差变化 + 局部耗时变化”的组合优化。它牺牲了一点全局精确性,但换来可并行、可承受的搜索成本。
第三段:Refinement 结构化剪枝
FoundationStereo 的 refinement module 是迭代式 ConvGRU。它从 initial disparity 和 hidden feature 出发,每轮消费 ,输出更新后的 。这种 recurrent dependency 不能像普通顺序 CNN 一样随便剪,因为 hidden state 的输入输出 channel 之间有跨迭代约束。
论文先构建 recurrent dependency graph,再做 structured pruning。
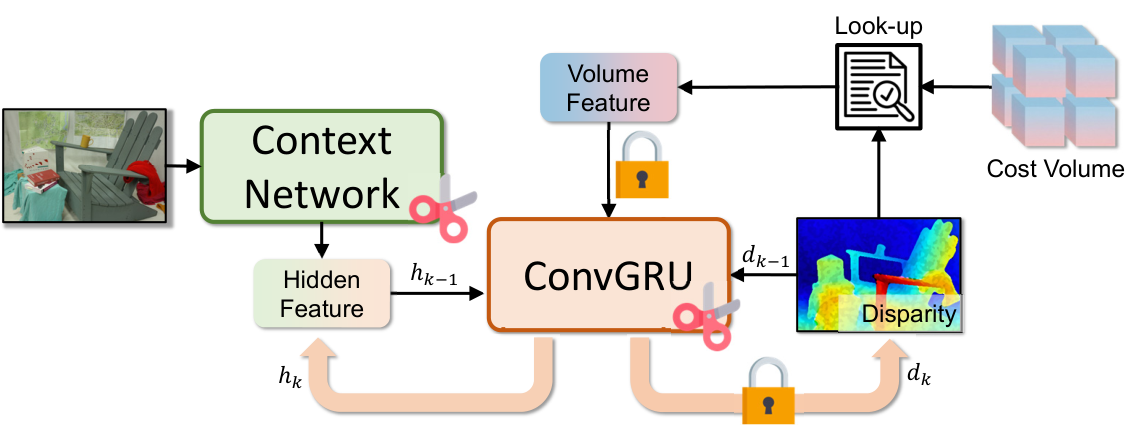
图源:Fast-FoundationStereo,Figure 5。原论文图意:Refinement module 的 ConvGRU 存在 recurrent dependencies;剪枝位置和固定 channel 位置需要按依赖图约束。
论文额外加入三类剪枝约束:
| Constraint | Why it matters |
|---|---|
| Final layers for disparity map and convex upsampling mask keep fixed output channels | 输出格式不能被剪坏 |
| The layer consuming and the layer outputting are jointly pruned | ConvGRU hidden state has recurrent channel dependency |
| Motion encoder consuming indexed volume feature keeps fixed input channels | Look-up volume feature interface不能改变 |
剪枝重要性用 first-order Taylor expansion 估计。做法是把输入送进完整 teacher model,端到端跑多个 refinement iterations,对 refinement module 累积梯度,然后全局排序并剪掉最不重要的 参数。论文尝试过 isomorphic pruning,但效果略差。
剪枝后只 retrain refinement module,其他 teacher 部分冻结。恢复损失是:
其中 ,。第一项监督每轮 refine 后的 disparity,越靠后的 iteration 权重越高;第二项让 student refinement 的 latent features 贴近 teacher。
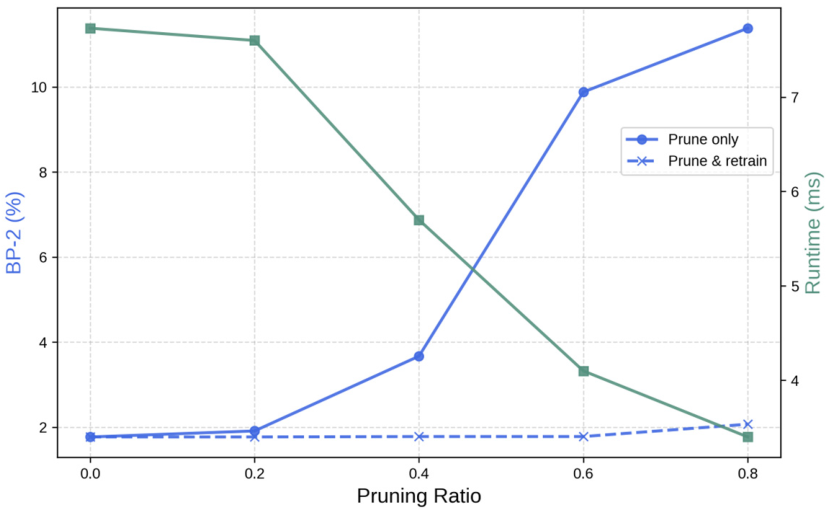
图源:Fast-FoundationStereo,Figure 9。原论文图意:只剪不训会明显伤 BP-2,剪后 retrain 能恢复精度;更高 pruning ratio 带来更低 runtime,但也更容易伤容量。
和 cost filtering 不同,refinement 模块的迭代更新有明显冗余。每次 refinement 都在相似结构里更新 disparity,通道冗余更容易被硬件友好的 structured pruning 转成真实加速。但这也有边界:Appendix 里 Figure 12 显示 pruning ratio 0.8 时,增加 refinement iterations 带来的精度收益变小,说明剪得太狠会限制迭代 refinement 的容量。
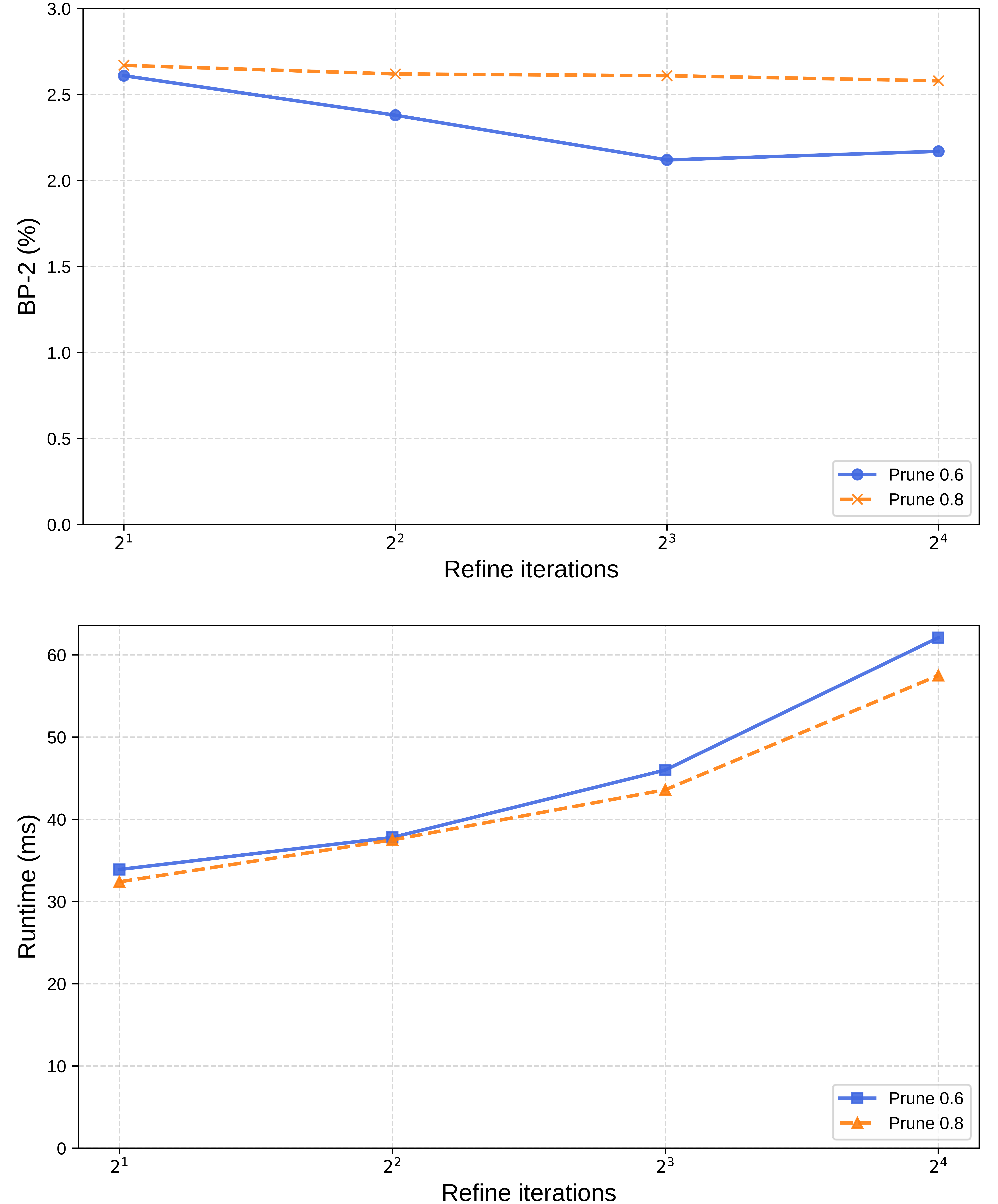
图源:Fast-FoundationStereo,Figure 12。原论文图意:比较 pruning ratio 0.6 和 0.8 下,refinement iterations 对 Middlebury-Q accuracy 与 runtime 的影响;论文最终表中模型采用 pruning ratio 0.6。
第四段:In-the-wild pseudo-labeling
这篇论文的训练细节里,最容易被低估的是伪标签数据。结构变小后,如果仍只在合成数据或窄分布数据上训练,实时模型可能会回到传统 stereo 的问题:快但泛化差。
Fast-FoundationStereo 从 Stereo4D 取 rectified stereo pairs,用自动 pipeline 生成 1.4M in-the-wild stereo pseudo labels。
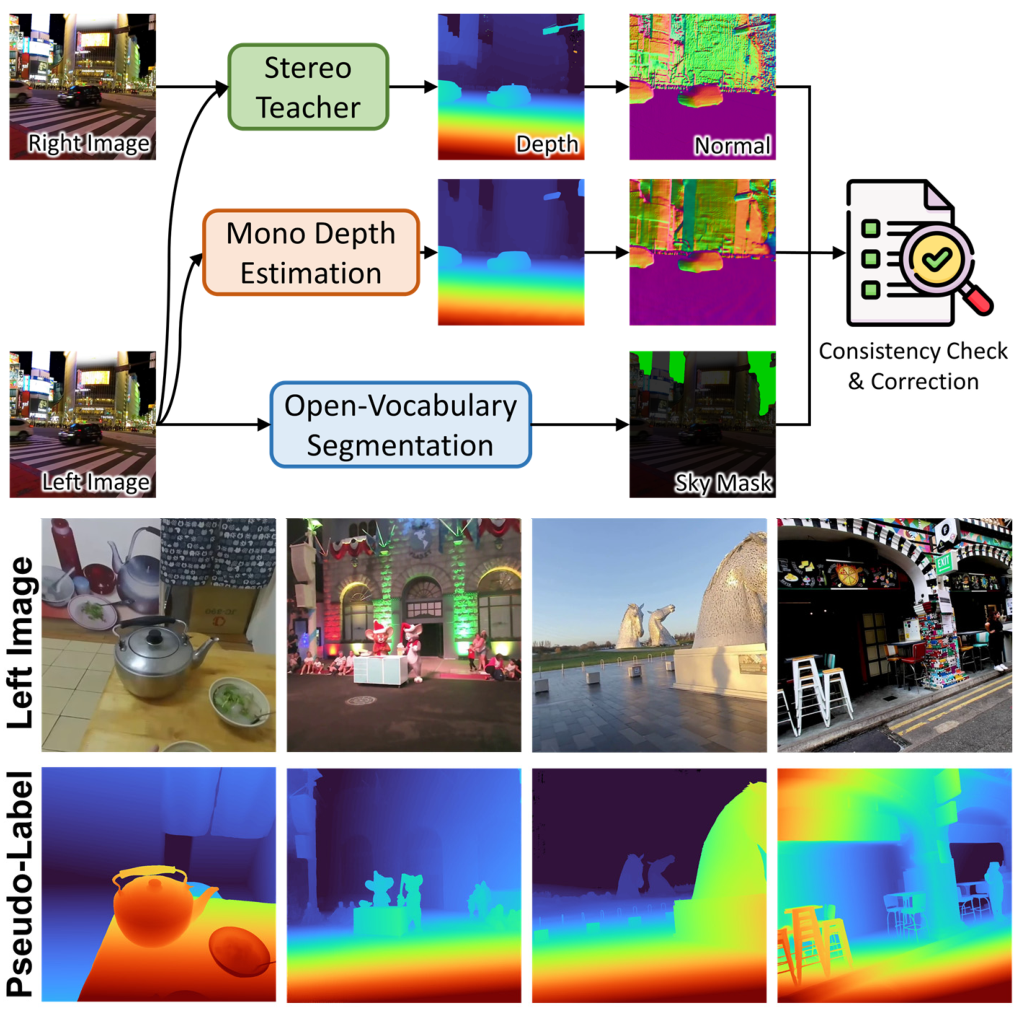
图源:Fast-FoundationStereo,Figure 6。原论文图意:对 in-the-wild internet stereo data,先用 stereo teacher 预测 disparity,再用 monocular depth estimator 和 normal consistency 做质量检查,最后生成可用于训练的 pseudo labels。
具体流程是:
- 输入 Stereo4D rectified stereo pair;
- FoundationStereo teacher 预测左图 disparity;
- monocular depth estimator 对左图估计 depth;
- disparity map 和 monocular depth 都用 Stereo4D camera parameters 做 3D unprojection;
- 对 unprojected geometry 用 Sobel operator 转成 normal maps;
- 计算两个 normal maps 的 per-pixel cosine similarity;
- threshold 后得到 consistency mask,过滤局部几何不一致样本;
- sky regions 用 open-vocabulary segmentation 检出,similarity computation 排除 sky;
- 最终 pseudo-label 里 sky regions 设置为 zero disparity;
- video temporal stride 为 10,得到 1.4M suitable stereo pairs。
Supplement 里还给了一个保留门槛:consistency mask 中 positive pixels 超过 60% 的样本会被保留,计算时排除 sky regions。
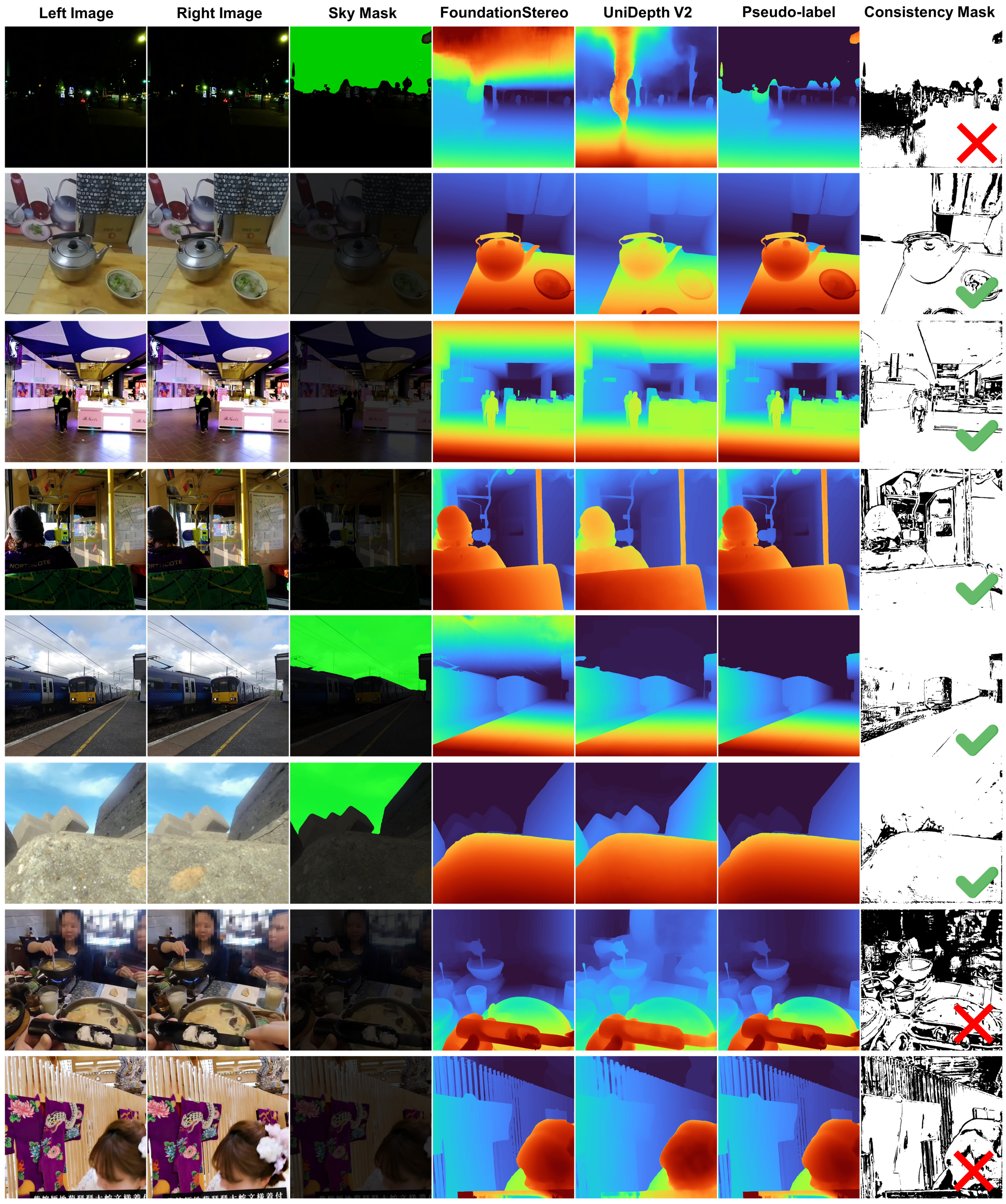
图源:Fast-FoundationStereo,Figure 15。原论文图意:展示 pseudo-labeling 的中间结果,右侧 check / cross 表示样本是否通过 consistency mask;pipeline 可以过滤字幕、马赛克和过难样本,也能修正 sky regions 上的错误预测。
in-the-wild stereo 的 depth range 差异很大,直接比较 disparity 或 depth 容易被尺度、远近范围和 noisy prediction 影响。normal map 更偏局部几何方向,可以更稳地判断两个估计是否在局部表面结构上相互支持。对 student 来说,这一步就是数据质量门禁。
Pseudo-label ablation 说明这批数据不只帮助 Fast-FoundationStereo,也能帮助其他实时方法。下面保留论文英文表头,括号内是 with pseudo-labeling。
| Method | Midd.-H BP-2 | ETH3D BP-1 | KITTI-12 D1 | KITTI-15 D1 |
|---|---|---|---|---|
| RT-IGEV | 11.52 (8.69) | 5.66 (5.12) | 4.54 (3.55) | 6.00 (4.40) |
| LightStereo-L | 23.76 (18.41) | 45.46 (21.12) | 13.98 (5.27) | 12.08 (7.63) |
| Ours | 2.53 (2.20) | 1.31 (1.22) | 2.44 (2.35) | 3.48 (3.25) |
表源:Fast-FoundationStereo,Table 4。原论文表意:加入 pseudo-labeled in-the-wild data 后,多个实时 stereo 方法的 zero-shot generalization 都提升,LightStereo-L 的 ETH3D 改善尤其明显。
训练配方总表
把论文的训练路径拆开看,会更清楚它不是一次性 train from scratch。
| Training phase | Trainable part | Frozen / teacher part | Objective / signal | Key detail |
|---|---|---|---|---|
| Backbone distillation | Student backbone | DepthAnything V2 + side-tuning CNN from FoundationStereo | Multi-level feature MSE | Linear projection if channels mismatch; both stereo images included in batch |
| Cost block distillation | Candidate block | Teacher block and teacher input feature | Block output MSE; final block also smooth to disparity GT | Complexity reduced from to |
| Cost block selection | None, selection only | Trained candidate blocks | ILP over and | Search different for speed-accuracy family |
| Refinement pruning | Pruned refinement module during retraining | Remaining teacher model frozen | Iterative disparity + latent feature distillation | , , pruning ratio |
| Pseudo-label generation | None | FoundationStereo teacher + monocular depth estimator + segmentation models | Normal consistency mask and filtered pseudo labels | Temporal stride 10; 1.4M pairs; positive mask > 60% kept |
| Final model training | Assembled candidate model | Teacher used as prior/source, not deployed | Same mixed datasets as FoundationStereo plus pseudo-labeled real data | 8 refinement iterations and max disparity 192 unless otherwise mentioned |
这张表里最重要的是“trainable part”和“frozen part”的分工。Fast-FoundationStereo 不是简单用一个小网络拟合最终 disparity,而是在不同阶段让 student 学 teacher 的中间能力:feature prior、cost filtering behavior、refinement latent dynamics,以及输出空间的 pseudo labels。
实验结果:速度、参数和成本账
Table 5 是最直接的效率账,下面保留论文英文格式。
| Method | Runtime (ms) 3090 | Runtime (ms) 4090 | Runtime (ms) A100 | #Param (M) | MACs (G) |
|---|---|---|---|---|---|
| FoundationStereo | 496 | 295 | 308 | 374.5 | 5413.9 |
| Ours | 49 | 30 | 41 | 14.6 | 309.9 |
表源:Fast-FoundationStereo,Table 5。原论文表意:Fast-FoundationStereo 相比 FoundationStereo 在 3090 / 4090 / A100 上都大幅降低 runtime,同时参数量和 MACs 显著下降。
从这张表能算出三个直观比例:
| Quantity | Rough reduction |
|---|---|
| 3090 runtime | 496 ms -> 49 ms, about 10.1x faster |
| #Param | 374.5M -> 14.6M, about 25.7x smaller |
| MACs | 5413.9G -> 309.9G, about 17.5x fewer |
论文还给出 runtime decomposition,说明收益不是来自某一个模块单点优化,而是 feature extraction、cost filtering、refinement 都被压下来。
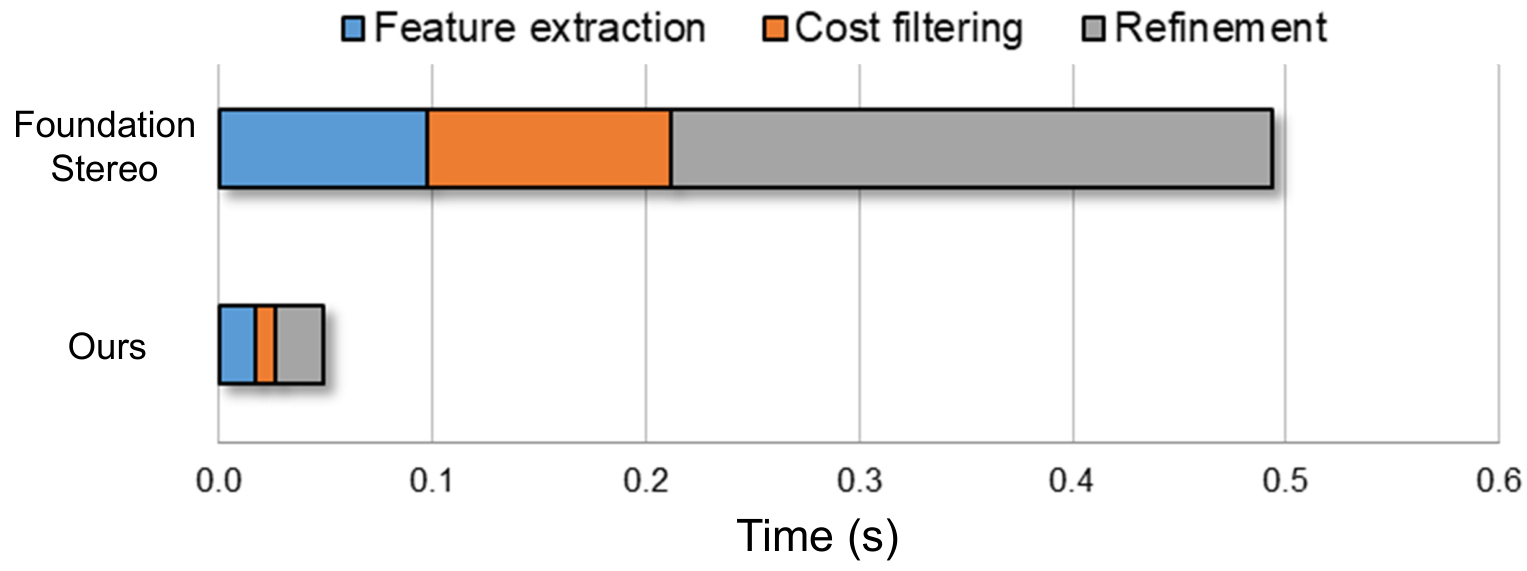
图源:Fast-FoundationStereo,Figure 10。原论文图意:在 NVIDIA 3090 上,FoundationStereo 的 feature extraction、cost filtering 和 refinement 都比 Fast-FoundationStereo 更耗时,三段共同构成超过 10x 的总加速。
如果只知道最终 runtime 从 496ms 到 49ms,很难判断下一步还能优化哪里。runtime decomposition 让我们看到,论文的三段加速都真实进入了热路径。后续如果要继续做 TensorRT、量化或 kernel 优化,也应该分别看 feature、cost volume construction、ConvGRU refinement 的剩余占比。
Zero-shot 结果怎么读
Table 1 很宽,完整表覆盖 Middlebury-H、Middlebury-Q、ETH3D、KITTI 2012、KITTI 2015 和 runtime。这里保留几行最能说明速度-精度权衡的结果,列名沿用论文英文。
| Method | Middlebury-H BP-2 | Middlebury-Q BP-2 | ETH3D BP-1 | KITTI 2012 D1 | KITTI 2015 D1 | Runtime (ms) |
|---|---|---|---|---|---|---|
| FoundationStereo | 1.10 | 1.30 | 0.50 | 2.30 | 2.80 | 496 |
| MonSter | 4.24 | 3.19 | 0.99 | 2.84 | 3.41 | 336 |
| Zero-RAFT-Stereo | 4.68 | 4.42 | 2.14 | 2.76 | 4.48 | 164 |
| LightStereo-L | 12.55 | 7.70 | 16.34 | 3.73 | 4.51 | 30 |
| RT-IGEV | 7.82 | 5.59 | 5.05 | 3.25 | 4.00 | 45 |
| Ours | 2.20 | 2.12 | 1.22 | 2.35 | 3.25 | 49 (21) |
表源:Fast-FoundationStereo,Table 1 摘要。原论文表意:Fast-FoundationStereo 在实时组里各数据集表现最好,并且在多个指标上接近 FoundationStereo;括号中的 21 是 TensorRT runtime。
这张表的读法是:
- Fast-FoundationStereo 不是最强精度,FoundationStereo 仍然更准;
- 但它把 runtime 从 496ms 拉到 49ms,TensorRT 到 21ms;
- 同样实时范围内,它比 LightStereo-L、RT-IGEV、BANet 等方法的 zero-shot error 明显低;
- 所以论文 claim 是“实时里强泛化”,不是“所有 setting 下超过 teacher”。
部署和工程启发
这篇论文对推理系统有几条很实用的经验。
第一,foundation model acceleration 要先做瓶颈归因。Fast-FoundationStereo 不是直接说“用蒸馏压缩模型”,而是先拆成 feature、cost filtering、refinement 三段,再决定每段用什么工具。
第二,student 不一定只学最终输出。中间 feature、block output、latent feature 和 pseudo-label 都可以成为训练信号。尤其当 teacher 很强但很慢时,中间监督能让 student 更像 teacher 的内部计算过程,而不只是拟合最终 disparity。
第三,真实数据质量门禁是效率的一部分。高效模型容量更小,对 noisy labels 更敏感。如果 1.4M pseudo labels 没有 normal consistency / sky filtering / sample filtering,student 很可能学到 teacher 的错误或互联网图像噪声。
第四,搜索和剪枝要看模块形态。cost volume channel 已经小,剪枝收益有限;ConvGRU refinement 有迭代冗余,剪枝更合适。这个判断可以迁移到其他视觉和世界模型系统:不是所有模块都适合同一种压缩策略。
第五,TensorRT / ONNX / runtime path 要进入模型设计。论文主表的 49 (21) 说明模型结构和 deployment toolchain 是联动的。一个结构如果理论 MACs 少但 runtime 难融合、难导出、难 TensorRT 化,线上收益可能会缩水。
局限与风险
第一,模型继承 teacher 的边界。论文自己指出,translucent surfaces 仍然有挑战,虽然加入相关训练数据可能缓解,但它不是已经完全解决透明/反光几何。
第二,pseudo-label pipeline 是能力来源,也是风险来源。normal consistency 能过滤很多错误,但 teacher、monocular depth estimator、segmentation model 都会带来偏差。真实部署时要针对自己的相机、baseline、曝光和场景重新做质量验收。
第三,zero-shot benchmark 不能替代闭环任务收益。对机器人来说,disparity 更准不一定直接等于抓取、避障或导航成功率更高。还要看 depth-to-control pipeline、时延抖动、失败恢复和安全阈值。
第四,输入假设仍然重要。官方实现也强调 stereo images 应该 rectified / undistorted,左右图不能交换。真实硬件如果标定漂移、同步不准或镜头畸变未校正,再快的模型也会被输入质量拖垮。
第五,进一步低比特量化是未来方向而不是本文主线。论文结论提到 quantization 可以作为正交加速路线,但正文主证据主要来自蒸馏、搜索、剪枝和 TensorRT。
阅读结论
Fast-FoundationStereo 最适合记成一句工程原则:
把强 foundation model 变成实时模型时,先拆开热路径,再让每个瓶颈用适合自己的训练信号和结构约束降成本。
它对高效推理专题的补充价值在于跨出了 LLM decode:在实时机器人感知里,推理优化同样要同时考虑模型结构、训练蒸馏、数据质量、runtime 导出和 zero-shot 泛化。快不是目标本身,快且在真实场景里可靠才是目标。
- 回到论文总入口:论文专题讲解,用同一套 claim / 图表 / 边界口径横向比较。
- 把本篇结论接回主题:推理。
- 按导航顺序继续:KVSlimmer:非对称 KV 合并。
- Title: 论文专题讲解:Fast-FoundationStereo:实时 Zero-Shot 双目匹配
- Author: Charles
- Created at : 2025-11-08 09:00:00
- Updated at : 2025-11-08 09:00:00
- Link: https://charles2530.github.io/2025/11/08/ai-files-paper-deep-dives-inference-fast-foundation-stereo/
- License: This work is licensed under CC BY-NC-SA 4.0.