
论文专题讲解:Genie:没有动作标签,怎样学出可交互环境
论文题名: Genie: Generative Interactive Environments。
作者: Jake Bruce、Michael Dennis、Ashley Edwards、Jack Parker-Holder、Yuge Shi、Edward Hughes、Matthew Lai、Aditi Mavalankar、Richie Steigerwald、Chris Apps 等(共 25 人)。
机构: Google DeepMind、University of British Columbia。
时间 / 主题: 2024-02;世界模型。
arXiv / 官方报告: arXiv:2402.15391;官方材料:deepmind.google/research/publications/60474/。
GitHub / 项目: GitHub:未找到官方链接;项目页:deepmind.google/research/publications/60474/。
元数据来源与核验口径: 来源:arXiv;官方 / 项目材料;Checked Date:2026-06-04;Repro Status:Paper / official materials reviewed, independent reproduction not claimed。
这篇回答的问题。 如何理解“Genie”背后的核心机制、适用边界和下一步阅读路径。
Genie 最值得读的地方不是画质,而是问题设定:只有互联网视频,没有动作标签,模型却要学出可以逐帧控制的环境。 这让它和普通视频生成模型、Dreamer 式世界模型都不一样。
普通视频模型通常学:
这里 是过去帧, 是文本或其他条件。公式读法是:给定过去和条件,生成一个合理未来。世界模型用于交互时还要学:
这里 是动作。未来必须随动作改变,否则模型只能“续写视频”,不能被用户或 agent 控制。Genie 的困难在于训练数据没有真实 ,所以它引入离散潜在动作 :先从相邻帧变化中反推出一套 action codes,再用这些 codes 驱动未来帧生成。
论文的核心位置
Genie 论文把模型类别分成三类:
| Model class | Training data | Controllability |
|---|---|---|
| World models | Video + actions | Frame-level |
| Video models | Video + text | Video-level |
| Genie | Video | Frame-level |
表源:Genie: Generative Interactive Environments,Table 1。原表表达:传统 world model 依赖视频和动作,video model 通常只做到视频级控制;Genie 的主张是只用 video data 学出 frame-level latent action control。本站读法:这张表不是说 Genie 已经是完整机器人世界模型,而是说它把“动作标签缺失”这个瓶颈单独拿出来解决。
所以读 Genie 时要抓住一句话:动作可以先作为解释状态变化的潜变量被学出来。 如果这组 latent action 在不同场景里都能稳定表示“左、右、跳、下压、上移”这类变化,它就像一套从视频里学出来的新手柄。
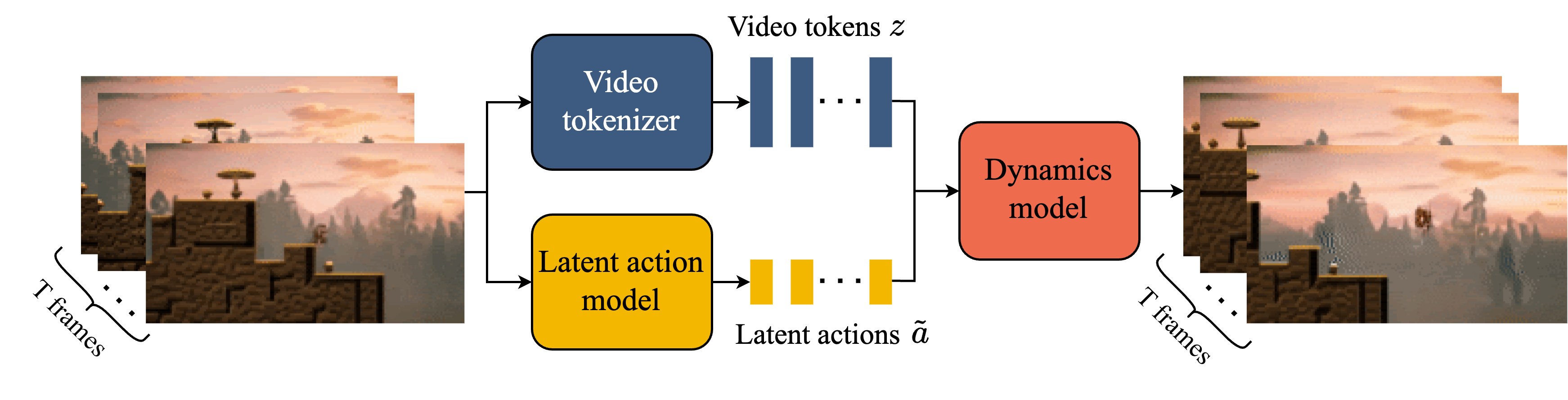
图源:Genie,Figure 2。原图表达:视频帧经 tokenizer 变成离散 video tokens;latent action model 从相邻帧推断 latent actions;dynamics model 用历史 tokens 和 latent actions 预测未来 tokens。本站读法:蓝线负责“把视频变成状态”,黄线负责“从变化里找动作”,橙色模块负责“动作条件下预测下一帧”。
三个组件各自解决什么
Genie 不是一个单块视频模型,而是三个组件串起来。
| 组件 | 输入 | 输出 | 它解决的问题 |
|---|---|---|---|
| Video tokenizer | 原始视频帧 | 离散 video tokens | 把高维像素压成可预测状态 |
| Latent Action Model | 历史帧和下一帧 | 离散 latent action | 从无动作视频里发现“发生了什么变化” |
| Dynamics model | 历史 tokens 和 latent actions | 未来 frame tokens | 学动作条件下的未来演化 |
Video tokenizer 的关系可以写成:
这里 不是语义标签,而是离散视觉状态。Genie 使用带 ST-transformer 的 VQ-VAE 风格 tokenizer,重点不是把每帧压得最漂亮,而是给 dynamics model 一个稳定、可预测、能保留时序信息的状态空间。

图源:Genie,Figure 5。原图表达:带 ST-transformer 的 video tokenizer 把视频编码到离散 codebook,再由 decoder 还原。本站读法:tokenizer 是世界模型的状态接口,状态压缩得太粗会伤 dynamics,状态太细又会让未来预测成本过高。
Latent Action Model 是论文的核心。它的 encoder 可以看到 和 ,推断连续 latent action;VQ codebook 把它离散成少量 action codes;decoder 只能看历史帧和这个 latent action 来重建下一帧。这个限制迫使 action code 携带“从过去到未来发生了什么变化”。
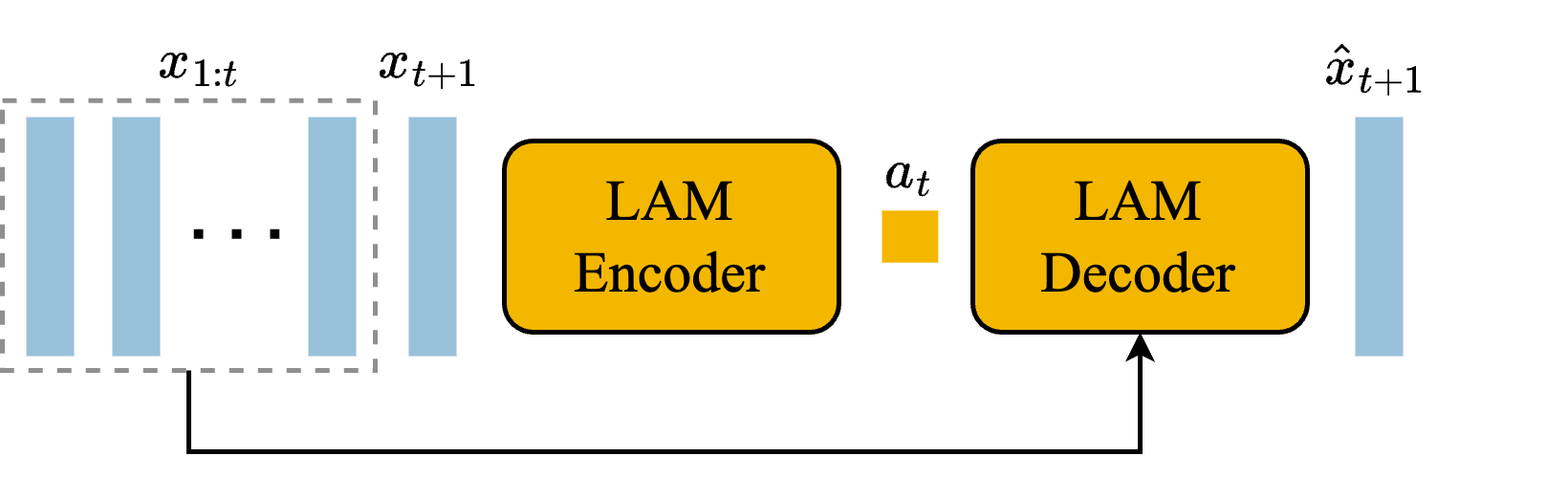
图源:Genie,Figure 4。原图表达:LAM encoder 从相邻帧推断 latent action,经 VQ codebook 离散化;decoder 用历史帧和 latent action 预测下一帧。本站读法:LAM 不是最终控制器,它是训练阶段的“动作发现器”。
主实验里 LAM 使用 8 个 latent actions。这个数字小很重要:action codebook 太大,重建可能更容易,但人或 agent 很难探索;codebook 太小,动作表达又不够。Genie 的 8-action 设置是在重建能力和可交互性之间取折中。
Dynamics model 的训练目标是预测未来 video tokens:
这里 是模型预测的未来 tokens, 是 tokenizer 给出的真实未来 tokens,CE 是 token-level cross entropy。公式读法是:给定过去状态和 latent actions,下一帧 token 预测得越准,loss 越小。训练时随机 mask future tokens,并用 MaskGIT 风格逐步补全;推理时,用户选择 latent action,模型一步步生成下一帧。
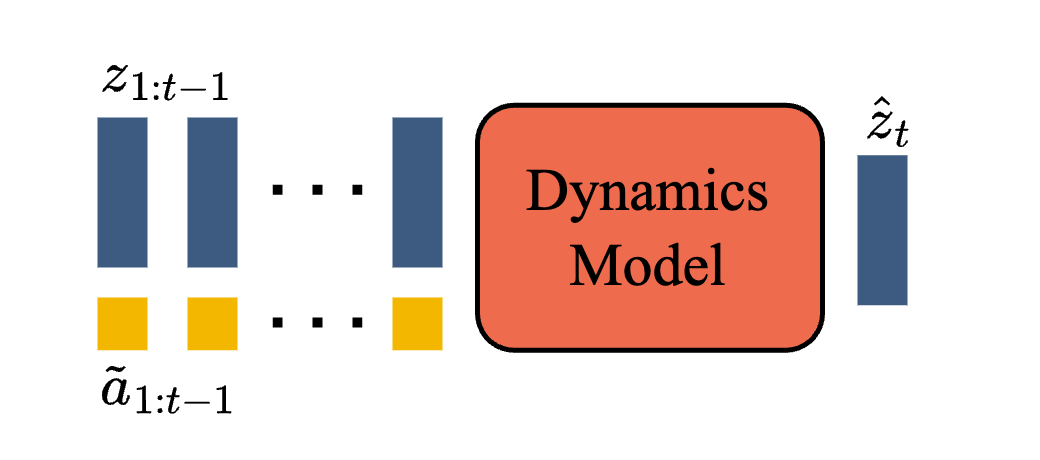
图源:Genie,Figure 6。原图表达:dynamics model 接收 video tokens 和 action embeddings,预测 masked future video tokens。本站读法:这一步才把 latent action 变成可操作的未来预测。
为什么用 ST-transformer
视频 token 数是 。如果对所有时空 token 做全局 self-attention,计算量会很快爆炸。Genie 的 ST-transformer 把注意力拆成两部分:同一帧内做 spatial attention,相同空间位置跨帧做 temporal attention。
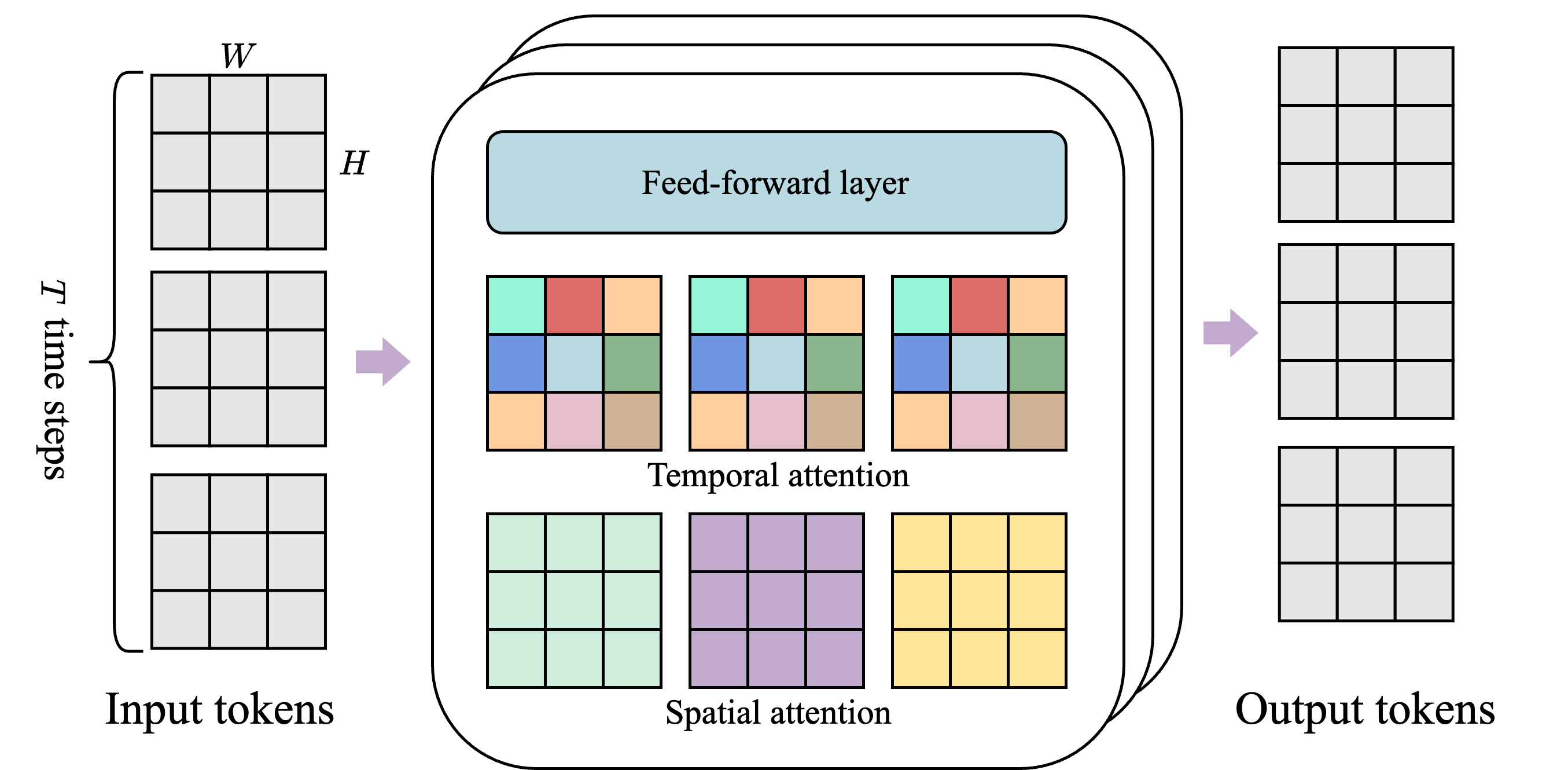
图源:Genie,Figure 3。原图表达:spatiotemporal block 由 spatial attention、temporal attention 和 feed-forward layer 组成。本站读法:spatial attention 看懂单帧结构,temporal attention 保留运动方向;这比纯空间 tokenizer 更适合后续动作条件预测。
这个设计的意义是:世界模型既要知道单帧里角色、平台、障碍物、机械臂的位置,也要知道它们怎样随时间移动。Genie 还让 temporal layer 使用 causal mask,使每个编码只汇聚过去信息,更贴近交互式 rollout 的因果顺序。
推理时像按一个新手柄
推理流程可以读成一个闭环:
1 | 初始图像 x_1 |
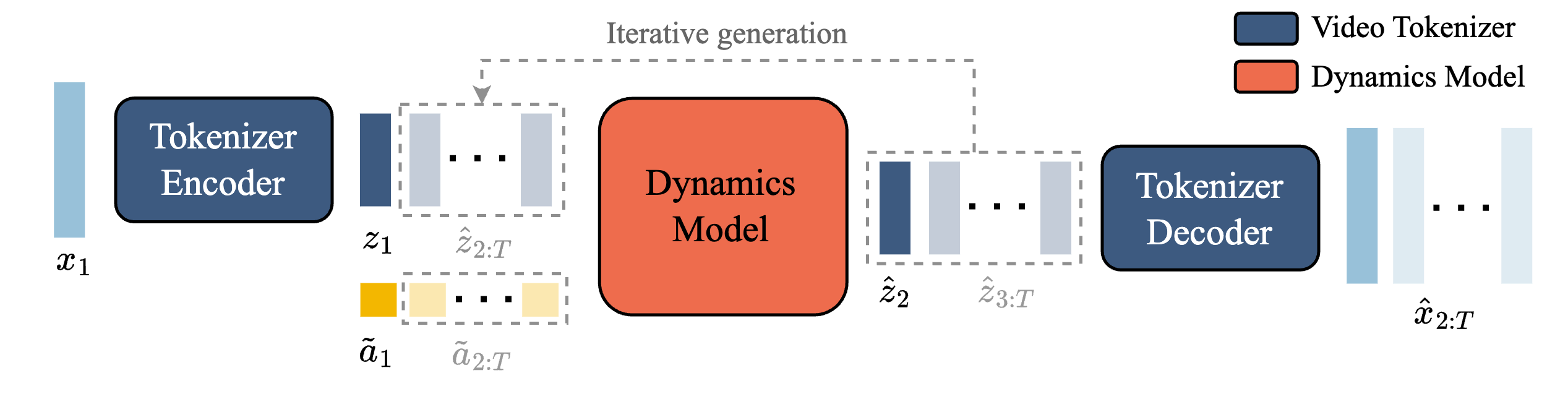
图源:Genie,Figure 7。原图表达:prompt frame 被编码成 token,用户输入 latent action,dynamics model 迭代预测下一帧 token,再由 tokenizer decoder 解码回图像。本站读法:交互性来自“每一步都能换 latent action”,不是一次性生成整段视频。
一开始用户并不知道 action 0 到 7 分别是什么。像玩一个新手柄一样,试几次后会发现某些 code 在多种场景里稳定对应左移、右移、跳跃、停止或机械臂上下移动。这个性质才是 Genie 与普通 video continuation 的分界。
数据质量为什么是关键
Genie 的 Platformer 数据来自公开视频,先用关键词抓取 55M clips,约 244k 小时;再经过 learned filtering 得到 6.8M clips,超过 30k 小时。论文用 10k 手工标注视频训练一个小分类器筛掉菜单、主播、剪辑、非玩法等低质量内容。Table 4 显示,筛选后数据更少,但 FVD 更好:原始 55M videos 为 61.4,curated 6.8M videos 为 54.8。
这里的启发很强:交互世界模型需要的是清晰的状态变化,不只是好看的画面。如果视频里大量混入菜单、剪辑、静态图、无关人脸,LAM 会把“画面变化来源”学乱,latent action 就不稳定。
怎样评估“可控”
只看 FVD 不够,因为 FVD 主要看视频分布质量。Genie 还用了 来检查 latent action 是否影响未来:
这里 是使用从真实视频推断出的 latent actions 生成的帧, 是使用随机 latent actions 生成的帧。读这个公式时,重点是比较:如果 inferred action 生成的帧更接近真实帧,而随机 action 明显偏离,说明 action 对未来有作用。
但这个指标仍然有限。它能说明“换 action 会影响短期未来”,不能证明 action 语义完全正确,也不能证明长时 rollout 稳定,更不能证明它可用于真实机器人安全规划。
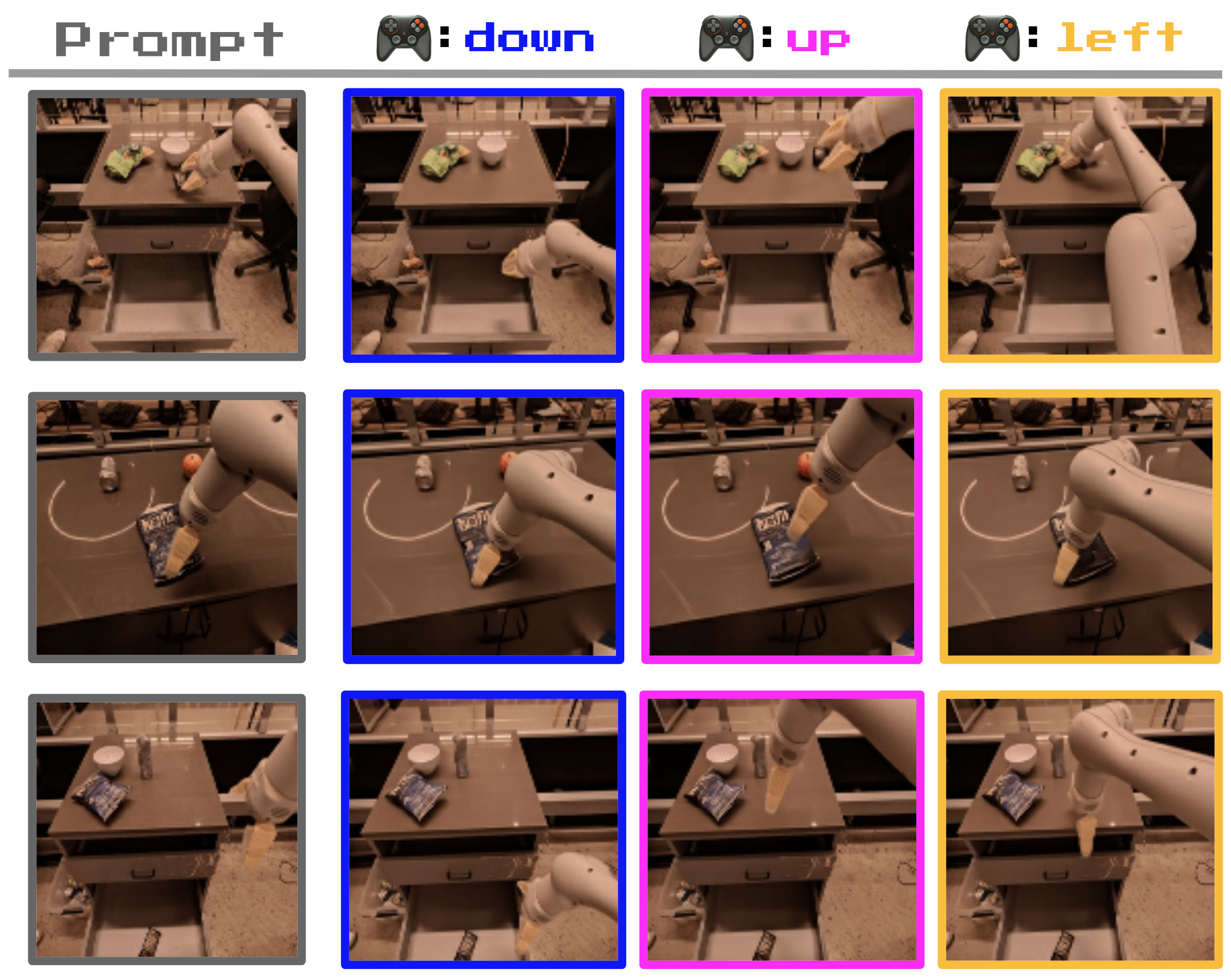
图源:Genie,Figure 12。原图表达:Robotics 数据上,同一 latent action 在不同起始帧里产生相似方向变化,例如 down、up、left。本站读法:按列看 action code 是否有一致语义;注意这仍是视频 latent action,不等价于真实机器人控制器动作。
Robotics 结果说明 Genie 不只是在 2D 平台游戏里移动贴图。论文把 RT-1、仿真数据和真实 robot episodes 当作视频使用,不用动作标签,仍能学出某些机械臂方向语义。这是它对具身世界模型最有价值的一点。
对 agent 的意义:imitation from observation
Genie 还展示了一个 proof of concept:用冻结 LAM 给没有动作标签的专家视频打 latent action 标签,再训练 policy 预测 latent actions;最后用少量真实动作标签把 latent action 映射到环境动作。
1 | expert video without actions |
这个实验说明 latent action 不只是给人玩 demo 的按钮,也可能成为 imitation-from-observation 的中间表示。它还没有证明所有环境都能靠少量标签完成动作映射,但证明了“无动作视频”可以变成一种可训练的行为数据。
边界
Genie 的边界要说清楚。
第一,它只有短上下文。主模型使用 16 frames、10 FPS,大约 1.6 秒记忆,远不够长时地图、一致物理状态和长期任务规划。
第二,它很慢。论文报告约 1 FPS,并且每帧需要多步 MaskGIT sampling,所以它更像研究原型,而不是实时游戏引擎或机器人闭环控制器。
第三,latent action 不是 grounded real action。平台游戏里可以人工解释成左、右、跳;复杂机器人、多关节控制和自动驾驶里,latent-to-real mapping 会更难。
第四,评测仍偏短期和 open-loop。FVD、、定性图和 CoinRun proof of concept 很有价值,但距离“用世界模型提升真实策略收益”还有明显距离。
外部精读
- Genie 论文:看完整架构、训练细节和消融。
- Google DeepMind publication page:官方定位和项目入口。
- Genie project page:看交互 demo 和 qualitative examples。
- Genie 2 blog:对比后来 3D foundation world model 的方向变化。
阅读结论
Genie 的核心贡献是把“没有动作标签的视频”变成“有 latent action 接口的可交互环境”。它的训练范式可以概括为:
1 | unlabelled videos |
如果你在做游戏、机器人或视频世界模型,而手里有大量无动作视频,Genie 是必须读的一篇。它提醒我们:动作不一定一开始就来自真实控制器,也可以先作为解释相邻状态变化的离散潜变量被学出来;真正部署时,再把这套潜在动作接口接到真实动作、策略、规划器或交互 UI。
相关阅读与下一步
- 外部材料:论文标题 arXiv 检索。
- 外部材料:Semantic Scholar 标题检索。
- 外部材料:Papers with Code 检索。
- 站内下一步:论文精读专题。
- 站内下一步:论文专题写作规范。
- 站内下一步:外部精读来源台账。
- Title: 论文专题讲解:Genie:没有动作标签,怎样学出可交互环境
- Author: Charles
- Created at : 2025-11-18 09:00:00
- Updated at : 2025-11-18 09:00:00
- Link: https://charles2530.github.io/2025/11/18/ai-files-paper-deep-dives-world-models-genie/
- License: This work is licensed under CC BY-NC-SA 4.0.