
VLM/VLA:动作表示与控制接口:模型输出怎样变成机器人动作
这篇回答的问题。 如何理解“VLA 动作表示与控制接口”背后的核心机制、适用边界和下一步阅读路径。
VLA 最容易被讲成“把语言、图像和动作都 token 化”。这句话只讲到训练格式,没有讲到执行。真正要追的是:模型输出的东西,怎样变成机器人在某个坐标系、某个频率、某个安全边界内执行的动作。
机器人动作不是文本答案。它可能是末端位姿增量、关节角、速度、夹爪开合、未来一段轨迹、离散 action token,或者高层技能名。动作接口一旦不清楚,模型看起来会“懂任务”,真实控制时却会抖、慢、撞、抓不稳。
动作接口是一份协议
一个最小 VLA 闭环可以拆成:
1 | vision / language / proprioception |
policy 可以是 Transformer、VLM、diffusion policy、flow policy 或层级策略。controller 负责把目标位姿、关节命令或轨迹变成真实电机控制。中间的 action representation 必须说明五件事:
| 接口问题 | 必须说清什么 | 如果不清楚会怎样 |
|---|---|---|
| 坐标系 | base、camera、end-effector、world/task frame | “向左”在模型和机器人里不是同一方向 |
| 变量 | 末端位姿、关节、速度、夹爪、技能 | 模型输出无法被 controller 接住 |
| 时间 | 单步动作、action chunk、技能持续时间 | 控制频率变了,动作尺度也变了 |
| 精度 | 连续值、离散 bin、codebook token、latent | 离散误差或回归噪声会进入执行 |
| 执行 | IK、轨迹跟踪、限幅、碰撞检查、急停 | 模型给出“合理”动作也可能不可执行 |
所以 VLA 的动作层不是一个小尾巴,而是把“理解任务”和“执行任务”接起来的接口层。读论文时,动作协议比模型名更先看。
最小动作向量藏着很多假设
机械臂操作里常见动作是末端执行器增量:
这里前三项是位置增量,中间三项是姿态增量,可以是 roll/pitch/yaw、axis-angle、quaternion 或 6D rotation, 是夹爪开合。这个向量看起来只有 7 维,但每一项都藏着接口假设: 是机器人底座坐标向前,还是相机画面向右? 是张开还是闭合?动作每 100ms 执行一次,还是每 20ms 执行一次?
相对动作常写成:
这里 是当前末端位姿, 是策略输出的相对位姿变化。它的直觉是:模型不直接预测“去世界坐标 ”,而是预测“从当前手的位置向前一点、向下小半格、转一点”。
相对动作通常比绝对动作更容易迁移,因为不同桌面、机器人基座和相机安装带来的全局偏移更少。但它也有边界:状态估计错了会累积,控制频率变了会改变速度,外参错了会把视觉方向映射成错误运动。
动作层级不能混在一起
动作可以分成四层。层级不同,模型学到的东西和部署风险都不同。
| 层级 | 例子 | 优势 | 风险 |
|---|---|---|---|
| 高层技能 | open drawer, pick cup |
语义清楚,适合规划 | 需要技能库或低层策略接住 |
| 末端位姿 / waypoint | 接近 manipulation 语义,跨机器人相对友好 | 坐标系、IK 和 controller 很关键 | |
| 关节位置 / 速度 | , | 贴近硬件执行 | 跨 embodiment 难,学习负担大 |
| latent skill / action code | skill vector、action codebook | 可压缩复杂短技能 | 可解释性和安全边界弱 |
RT-2 把动作写成 token,ACT 一次输出短窗口动作,Diffusion Policy 生成未来动作序列,Octo 用 diffusion decoding 支持多模态动作分布。它们不是“动作头”的同义词,而是不同控制接口。
RT-1 / RT-2:把连续动作离散成 token
RT-1 和 RT-2 的关键不是单纯“机器人用了 Transformer”,而是把动作离散化,让模型可以像预测 token 一样预测动作。
连续动作离散化可以写成:
这里 是动作第 个连续维度, 把它映射到离散桶 , 是观测历史, 是语言指令。第二行表示:模型不直接回归一个连续向量,而是逐个生成离散动作 token。
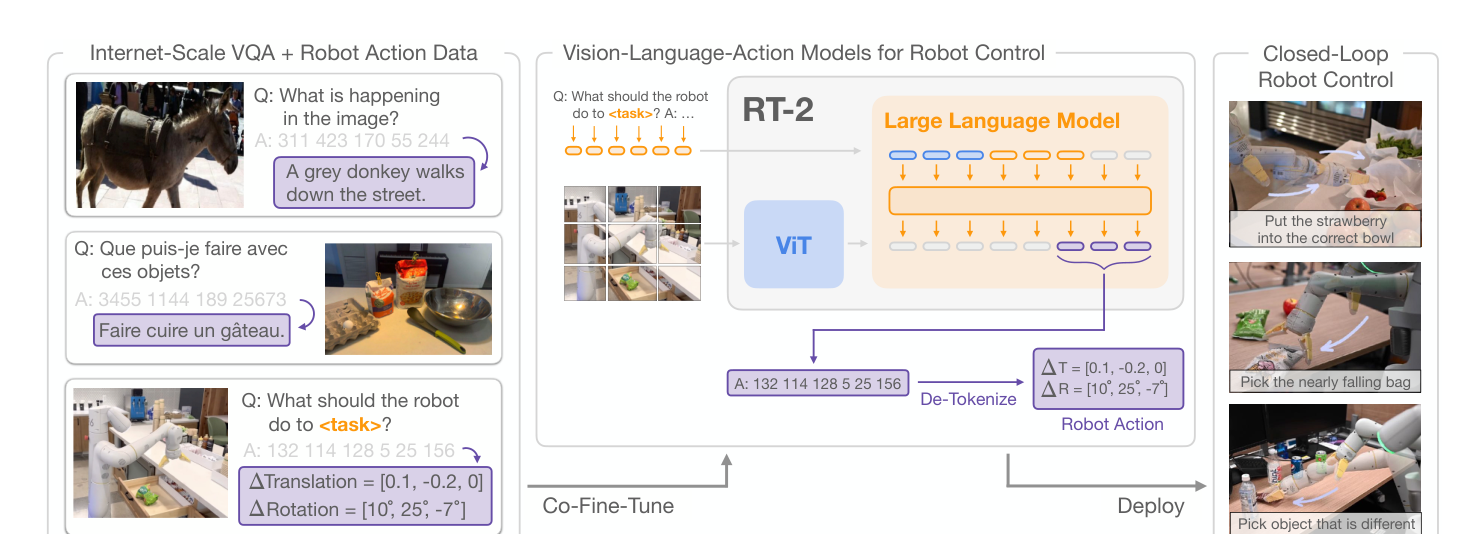
图源:RT-2,Figure 1。原图表达 web-scale VQA / VLM 训练和 robot action token 如何被 co-fine-tune 到同一个 VLA 框架里。本文用它说明:VLA 的关键不是“多模态输入”,而是让动作进入可生成接口,并最终被真实机器人执行。
token 化的好处是训练接口统一:文本、视觉和动作都可以进入序列建模。代价是分桶会带来量化误差,精细插接、旋拧、力控和小幅姿态调整可能需要更高分辨率或连续控制头。
Open X-Embodiment / RT-X 进一步说明了接口标准化的重要性。它把不同机器人数据对齐到共同动作口径,例如相对 gripper frame 的 7 维动作。这个细节很关键:跨机器人泛化不是把所有轨迹直接混起来,而是先让观测、动作、单位、坐标和时间戳有可训练的共同语义。
ACT:一次输出一段短时动作
很多 manipulation 任务不是每一帧都重新决定“下一毫米怎么走”。抓杯子、插电池、拉抽屉、折布都需要短时间连续动作。Action chunk 的做法是让策略一次输出未来 步:
这里 是未来一段动作,不是单个动作。执行时系统可以每隔一小段时间重新预测,把多个重叠 chunk 平滑融合。
ACT 的 temporal ensembling 可以写成:
这里 表示第 次推理对当前时刻 的动作预测, 是融合权重。白话说,不要让某一次模型输出的噪声立刻造成机械臂抖动,而是把多次预测揉成更平滑的执行命令。
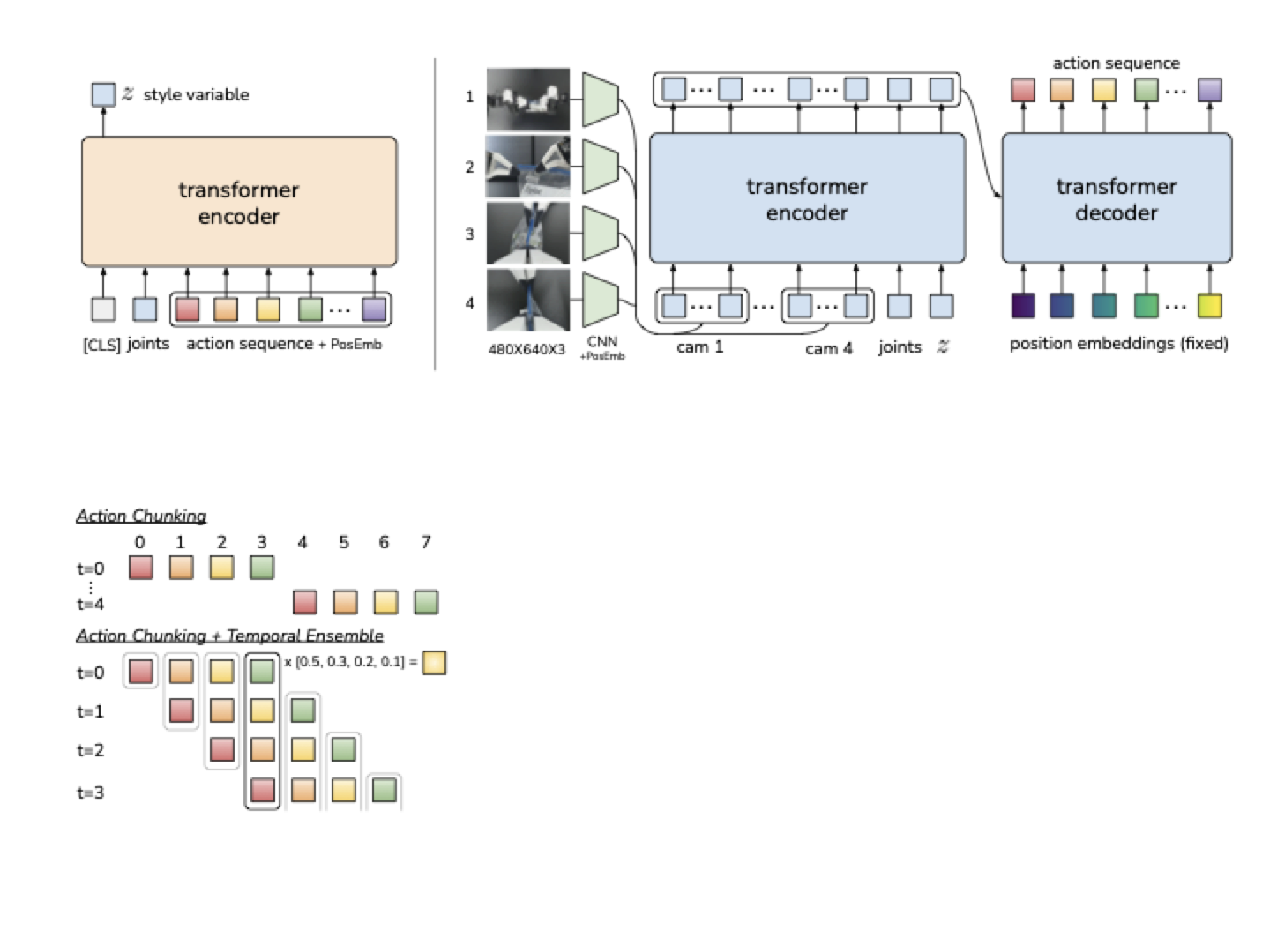
图源:Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware,ACT 方法图。原图表达 policy 根据当前观测输出一段 action sequence,并用 temporal ensembling 平滑执行。本文用它说明:action chunk 是短时控制接口,不是完整任务计划。
Action chunk 的代价也很清楚:如果前几步已经偏了,后面 chunk 可能继续执行错误。因此 chunk 不能开环到底,必须配合重新观察、chunk overlap、安全过滤和失败恢复。它解决的是短时连贯性,不替代闭环。
Diffusion Policy:动作也可以是一个生成分布
动作不一定只有“回归一个向量”或“生成离散 token”两种形式。Diffusion Policy 把未来动作序列看成要从噪声里生成的对象:
这里 是未来 步连续动作序列。模型不是输出单一平均动作,而是学习一个条件动作分布。对多模态任务很重要:同一个杯子可以从左侧抓,也可以从右侧抓;直接回归均值可能得到一个两边都不好的中间动作。
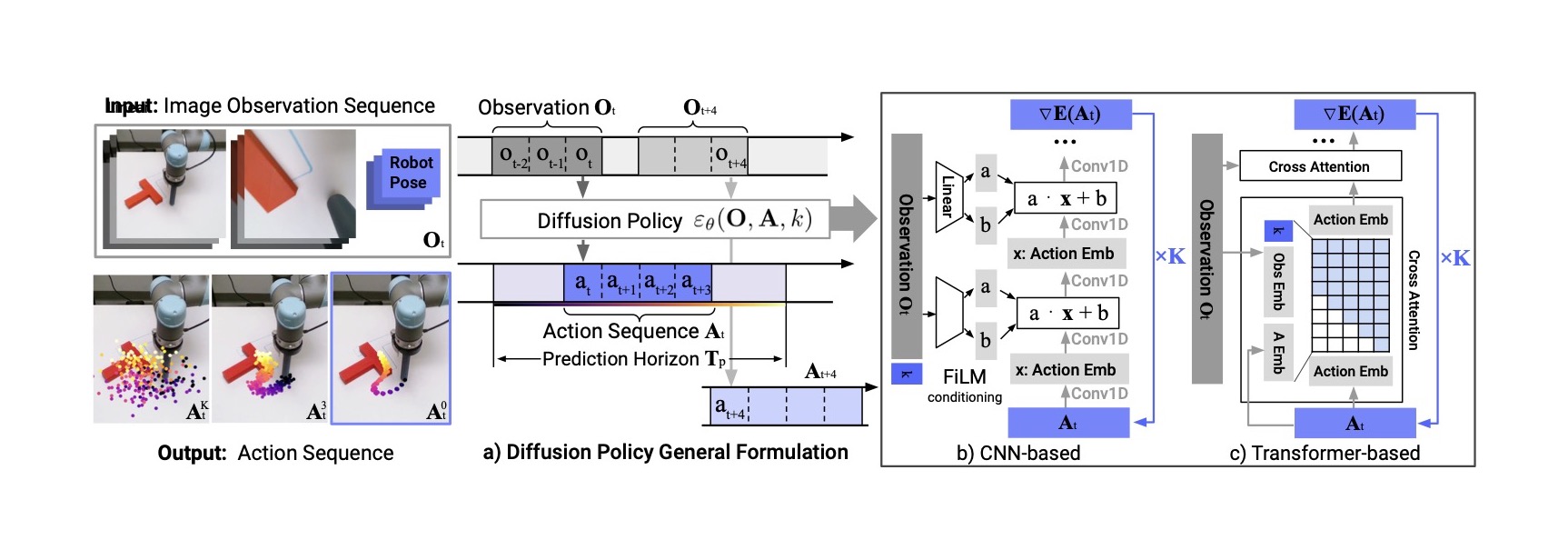
图源:Diffusion Policy。原图表达 Diffusion Policy 根据视觉观测和机器人状态生成未来动作序列。本文用它说明:连续动作接口可以用生成式模型表达多峰动作分布,并通过 receding horizon 控制落到闭环执行。
Diffusion Policy 的关键不是“用了扩散模型所以更高级”,而是它把动作分布、连续动作序列和 receding horizon 控制接起来。它仍然需要 controller、动作限幅、执行频率和真实反馈;生成出的 action sequence 不是电机命令的终点,而是下一轮闭环的候选轨迹。
坐标系比模型名更重要
动作表示一定要回答坐标系:
| 坐标系 | 动作含义 | 常见风险 |
|---|---|---|
| robot base frame | 相对机器人底座移动 | 机器人安装位置变了要重新对齐 |
| camera frame | 相对相机视角移动 | 相机外参、视角和深度误差会影响动作 |
| end-effector frame | 相对当前手爪移动 | 局部操作自然,但全局路径要另规划 |
| world / task frame | 相对桌面、物体或场景坐标 | 需要可靠标定和物体 pose |
很多 VLA 失败不是语言没听懂,而是动作接口不对齐。训练数据里动作在 gripper frame,部署时 adapter 当成 base frame;相机外参变了但动作转换没更新;夹爪开合归一化方向反了;控制频率从 10Hz 变成 30Hz 后同样的 变成三倍速度。
旋转也会出问题。Euler angle 可读但有奇异性,quaternion 稳定但有归一化和双覆盖问题,axis-angle 紧凑但大角度不直观,6D rotation 连续性好但需要转换。论文里一句“predict end-effector pose”不够,必须看它如何表示 rotation、如何归一化、如何进入 controller。
频率、延迟和控制器决定闭环质量
VLA policy 不可能无限快。假设模型推理 200ms,controller 50Hz,机器人执行还有机械延迟,那么一次 policy 输出到下一次真实反馈之间已经跨过多个低层控制周期。
这会带来三个问题:
| 问题 | 现象 | 常见处理 |
|---|---|---|
| 推理慢 | 机器人等模型,动作断续 | action chunk、小模型蒸馏、异步推理、视觉缓存 |
| 控制频率不匹配 | 动作尺度和速度异常 | 明确定义 action timestep 和 controller interpolation |
| 反馈滞后 | 看到的状态已经过期 | 状态估计、预测补偿、短 horizon 重规划 |
低层 controller 负责轨迹跟踪、阻抗控制、速度/加速度限幅、IK、碰撞检查和急停。VLA 输出的动作最好被看成“候选目标”或“短时轨迹”,不是直接下发电机的最终命令。
FAST:压缩动作不能丢掉接触时机
FAST 这类现代 action tokenizer 解决的是另一个痛点:机器人动作频率高、连续维度多,如果直接把每个低层动作都塞进自回归序列,token 太多、延迟太高、长程依赖也难学。
FAST 用 frequency-space action sequence tokenization 压缩高频连续动作,让 VLA 更像语言模型一样生成更短的动作 token 序列。它的工程意义不是“动作 token 越少越好”,而是把高频轨迹压到模型能学、能推理、还能还原接触细节的范围内。
压缩动作和压缩文字不一样。文字 token 少几个可能还能读懂,动作 token 少几个可能就是速度、夹爪力度或接触时机丢了。判断 action tokenizer 是否成功,不能只看 token compression ratio,还要看闭环成功率、动作平滑度、接触事件、延迟和失败恢复。
读 VLA 动作论文时先问这些
| 问题 | 为什么重要 |
|---|---|
| 动作在哪个层级 | 高层技能、末端位姿、关节命令和 latent skill 的泛化边界不同 |
| 坐标系和单位是什么 | 坐标错了,模型再强也会执行错方向 |
| 连续还是离散 | 离散 token 易接序列模型,连续控制精度更自然 |
| 单步还是 chunk | chunk 提升连贯性,也降低反馈频率 |
| 谁负责执行 | controller、IK、安全层和限幅决定动作是否真能落地 |
| 失败如何反馈 | 没有重观察和恢复,小错会被动作接口放大 |
| 是否跨机器人 | 不同 embodiment 的动作空间和传感器不同,不能只混数据 |
这些问题比模型名更重要。一个大 VLA 如果动作接口不清楚,部署风险可能比一个小得多但接口明确的策略更高。
最后看动作链路:模型输出什么,单位是什么,谁执行,多久重规划,失败如何停。只有这条链路清楚,VLA 才不只是会看图说话,而是真的能把意图变成稳定动作。
外部精读
- 本页来源台账:记录动作接口事实来源、图片使用和讲法边界。
- RT-1:理解真实机器人 Transformer policy、动作 token 和大规模机器人数据的早期接口。
- DeepMind RT-2 blog 与 RT-2 paper:理解 VLM 如何通过 action token 接入机器人控制。
- Open X-Embodiment / RT-X:看跨机器人数据如何统一 gripper-frame 动作口径。
- ALOHA / ACT:理解 action chunk 和 temporal ensembling。
- Diffusion Policy:理解连续动作分布、receding horizon 和视觉条件策略。
- Octo:看通用机器人策略如何支持不同观测、动作空间和 diffusion decoding。
- FAST action tokenizer:看现代 VLA 如何把高频连续动作压成更高效的离散 token。
相关阅读与下一步
- 外部材料:RT-2 官方博客。
- 外部材料:Open X-Embodiment 论文。
- 外部材料:ACT 论文。
- 站内下一步:VLA 专题。
- 站内下一步:VLA 数据与策略学习。
- 站内下一步:VLA 闭环恢复与失败分析。
- Title: VLM/VLA:动作表示与控制接口:模型输出怎样变成机器人动作
- Author: Charles
- Created at : 2026-02-11 09:00:00
- Updated at : 2026-02-11 09:00:00
- Link: https://charles2530.github.io/2026/02/11/ai-files-vla-action-representation-and-interfaces/
- License: This work is licensed under CC BY-NC-SA 4.0.