
世界模型:评测:不要让好看的未来骗过决策系统
这篇回答的问题。 如何理解“世界模型评测”背后的核心机制、适用边界和下一步阅读路径。
评测世界模型时,最容易被一段漂亮视频带偏。视频很清晰、动作很顺、物体看起来也没穿模,但只要换一个候选动作,未来仍然差不多;或者 planner 按它的预测去执行,真实环境里马上碰撞、滑落、卡住。这样的模型可以是很强的视频模型,却还不是可靠的决策模型。
这页只回答一个问题:怎样判断一个世界模型真的改善了动作选择、风险识别或数据回流,而不是只生成了更顺眼的未来。
先问谁要用它
同一个世界模型,给不同消费方用,验收口径完全不同。读论文或项目页时,先不要急着看总分,而要先定位它被谁消费。
| 消费方 | 它真正需要什么 | 不够用的指标 |
|---|---|---|
| 状态编码器 | latent 保留目标、接触、遮挡、位姿和任务阶段 | 重建图像清晰 |
| 视频模拟器 | 未来视频一致、可控、能持续交互 | 单帧美学分 |
| 动作 planner | 候选动作排序正确,错误动作被压低 | open-loop FVD |
| risk gate | near-miss、碰撞、滑落、不可达不漏报 | 平均预测误差 |
| data engine | 合成样本能补失败桶,进入训练后有效 | 生成样本数量 |
| policy evaluator | 离线/仿真评估与真实成功率相关 | 演示视频成功 |
所以“世界模型评测”不是一张榜单,而是一组接口测试。接口不同,分数不能互相代替。
三把尺子
第一把是画面尺。它回答“生成的视频像不像真实视频”。FVD、VBench、WorldArena 的视觉质量维度都属于这一层。它们能发现抖动、身份漂移、运动不平滑、背景不一致、物理不自然等问题,但不能单独证明模型能帮助机器人完成任务。
第二把是动作尺。它回答“同一历史下,换动作后未来是否合理分叉”。这一步开始接近世界模型本体:模型必须对动作敏感,而且敏感点要落在任务变量上。向左推杯子,未来应改变杯子位置、遮挡和碰撞风险;不应只是随机换背景纹理。
第三把是部署尺。它回答“预测被系统消费之后,真实决策有没有变好”。World-in-World、WorldArena / WorldArena 2.0、WoW-World-Eval 这类新基准的重要变化,就在于把视觉质量放回功能用途里看:作为 data engine 是否提升 policy,作为 evaluator 是否相关,作为 planner 是否在闭环里提高成功率。
截至 2026-06-03,世界模型评测前沿正在从 vision-only + offline score 往 multimodal + interactive utility + cross-platform 走。这个方向比“谁的视频更像真的”更接近机器人和 agent 需要的验收。
Open-loop 只看漂移
Open-loop 评测是在真实历史之后,让模型自己向前滚一段。它适合大规模离线比较,也适合找 horizon 变长后的误差漂移。
一步预测损失可以写成:
这里 是下一步预测, 是真实下一步, 可以是像素、latent、状态变量或任务变量上的误差。这行公式只问“下一步像不像”,因此很容易高估能力。
多步 rollout 更接近使用方式:
这里 是预测步数。随着 增大,如果误差快速上升,说明模型只能做局部拟合,不能稳定推演。对机器人和自动驾驶来说,漂移不是美观问题,而是会把 planner 带到训练分布之外。
但即使多步 open-loop 很好,也只能说明“沿着真实历史继续预测”还可以。它还没有回答“换动作后会怎样”,也没有回答“planner 会不会利用模型漏洞”。
反事实动作是最低门槛
动作条件世界模型必须通过一个最小测试:固定同一段历史,替换动作序列,未来是否按任务逻辑分叉。
可以把动作敏感性写成:
这里 和 是两组候选动作, 可以是未来状态、风险、reward、事件或视频 latent。重点不是 越大越好,而是变化要落在正确变量上。
反事实测试至少要覆盖三类样本。
| 样本 | 看什么 | 常见坏相 |
|---|---|---|
| 普通动作 | 日常动作后果是否合理 | 换动作后未来几乎不变 |
| 边界动作 | 两个候选动作接近时能否正确排序 | 把更危险动作排到前面 |
| hard negative | 碰撞、滑落、遮挡、错误抓取是否被识别 | 生成一条连贯但不可执行的计划 |
CausalVQA、V-JEPA 2 的物理推理 benchmark、WorldArena 的 controllability / action following 维度,都在往这个方向靠:把“看见了什么”推进到“如果这样做,会发生什么”。
Closed-loop 看模型会不会骗系统
Closed-loop 评测更严格,因为模型的预测会影响下一步动作,下一步动作又改变后续输入。很多模型 open-loop 看起来不错,closed-loop 失败,是因为 planner 会主动搜索模型里的高回报漏洞。
闭环指标至少要和系统动作绑定:
| 指标 | 读法 |
|---|---|
| task success | 真实或仿真执行是否完成任务 |
| regret | 模型选的动作和更好动作之间差多少 |
| candidate ranking agreement | 世界模型排序是否接近真实执行排序 |
| intervention / takeover | 安全层或人工是否频繁接管 |
| cost per success | 每个成功任务消耗多少 rollout、延迟和显存 |
| failure replay pass rate | 已知失败回放后是否不再犯同类错 |
World-in-World 的提醒很直接:视觉质量本身不保证任务成功,可控性更关键。WorldArena 进一步把世界模型放进 data engine、policy evaluator 和 action planner 三种下游任务里看。这个思路值得保留:先定义消费方,再定义指标。
风险要按场景桶校准
平均误差最容易掩盖高风险失败。真实系统里,一个低置信但会回退的模型,通常比一个平均分高却在 near-miss 上过度自信的模型更可用。
风险评测建议按桶报告,而不是只报总分:
| 风险桶 | 需要记录什么 |
|---|---|
| collision | 最小距离、接触前风险分、planner 是否继续推进 |
| slip / drop | 抓取姿态、接触状态、释放时刻、真实结果 |
| occlusion | 被遮挡对象是否仍保留在 state 中 |
| unreachable | IK / collision checker 是否提前拒绝 |
| human takeover | 接管前模型预测、候选动作和回退触发条件 |
| long-horizon drift | 任务阶段、目标物身份和空间布局何时开始漂 |
校准可以简单地按分数桶看。比如模型把一组样本预测成 80% 成功,那么真实成功率是否接近 80%。如果高置信桶里隐藏大量 near-miss,部署时就需要提高不确定性惩罚、补 hard set,或者让 safety layer 接管。
失败回放比总分更重要
一个世界模型失败日志应能回答“为什么选错动作”。例如移动操作机器人要把杯子放到上层柜子,有两个候选动作:先抬手再伸过去,或者先靠近再抬手。真实结果是前者碰到架沿,后者成功;模型却把前者判成低风险。
这条样本不应只记成“失败一次”,而要拆成四个判定:状态表示是否保留杯子、柜门和架沿位置;反事实排序是否把安全动作排在前面;风险分数是否把碰撞动作放进高风险桶;planner 依赖该预测时是否被安全层截停。
如果模型生成的视频更清晰,却仍把危险动作排在安全动作前,它没有通过世界模型评测。世界模型的目标不是生成更好看的失败,而是帮助系统避开失败。
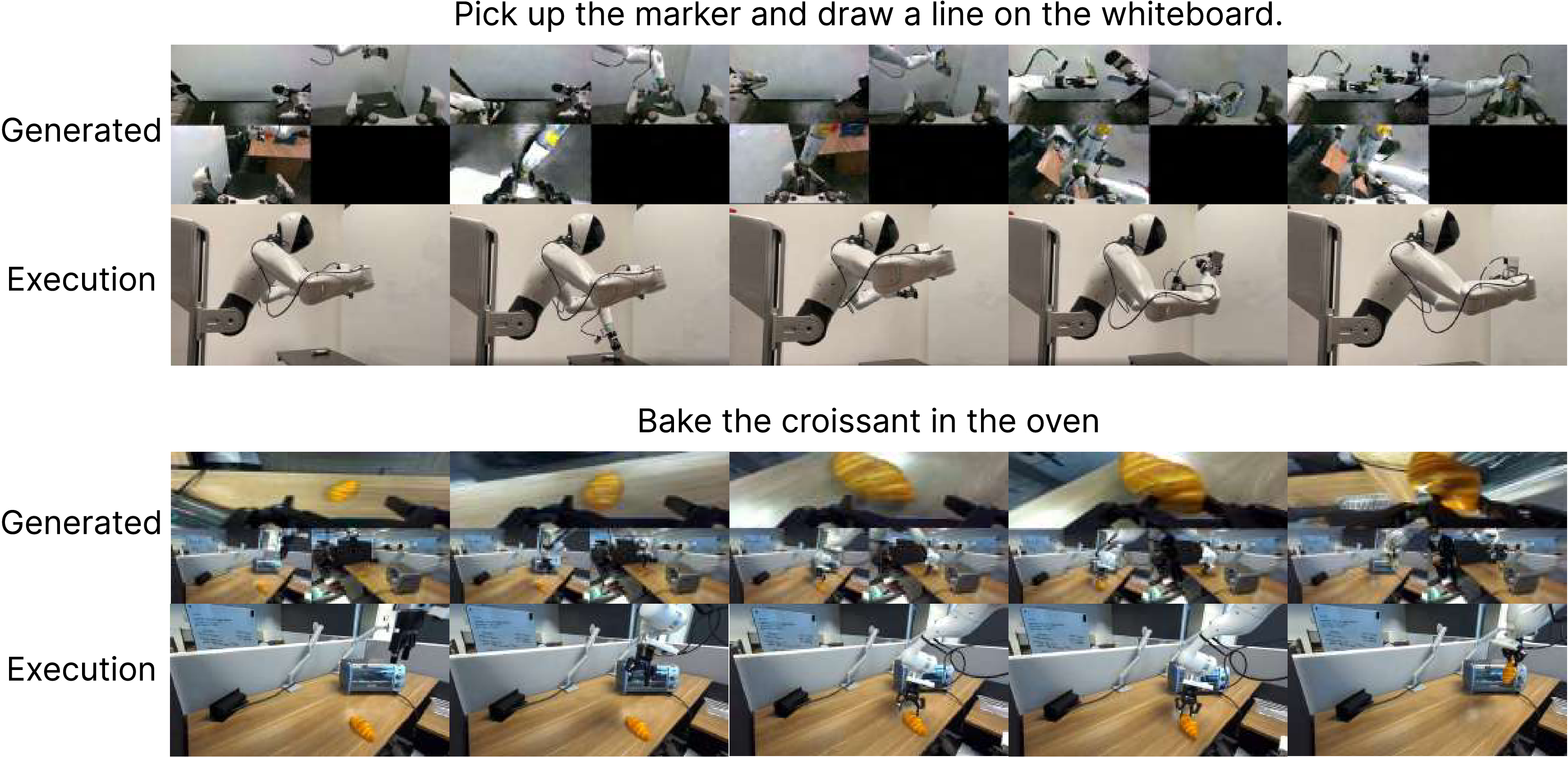
图源:DreamZero,Figure 16。原图展示 video-action model 的失败案例。本站读法:WAM 的危险在于错误未来和错误动作可能互相支持,看起来像一条连贯计划;评测必须检查真实观测刷新后能否纠正,以及 safety layer 能否提前截停。
失效模式按修复路径分类
failure mode 最好按“下一步怎么修”分类,而不是只写现象。
| 失效类型 | 现象 | 更可能的修复方向 |
|---|---|---|
| 表示失败 | 小物体丢失、遮挡后失忆、接触状态不可读 | 改 tokenizer / latent、加关键状态标签或辅助头 |
| 动力学失败 | 短期准,长期漂,多主体交互崩 | 多步训练、latent rollout 正则、闭环失败回放 |
| 动作条件失败 | 换动作后未来几乎不变 | 增加反事实动作数据、改动作注入方式 |
| 未来平均化 | 多种可能被洗成均值 | 分支采样、随机 latent、扩散或离散 token 生成 |
| 规划漏洞 | planner 找到模型里高回报但现实坏的动作 | adversarial planning test、不确定性惩罚、真实回放 |
| 风险失准 | 高置信预测里藏着 near-miss | calibration、hard set、保守回退阈值 |
| 部署失败 | 太慢、不可监控、不能回退 | 分层使用、低频分析、fallback、资源预算 |
这个表的意义是把评测和下一轮训练连接起来。否则世界模型报告会停在“某指标下降”,却不知道是表示、动力学、动作、风险还是系统预算出了问题。
发布门槛怎么写
发布门槛应围绕消费方,而不是围绕论文榜单。
| 给谁用 | 最小发布门槛 |
|---|---|
| planner | 候选动作排序提升,closed-loop success 不退化,cost per success 可接受 |
| risk gate | collision / near-miss false negative 不增加,高风险桶校准不过度自信 |
| data engine | 合成样本进入训练后改善目标失败桶,不能污染主分布 |
| policy evaluator | 世界模型评估分与真实或高可信仿真成功率有稳定相关 |
| 人审工具 | 反事实未来可解释,失败样本能回放到动作和状态变量 |
一个可执行的门槛可以这样写:目标任务桶的 counterfactual ranking 至少提升;near-miss、collision、human takeover 任一高风险桶不能退化;主分布成功率不能明显下降;所有新增失败必须能定位到表示、动作条件、风险或系统预算中的至少一类。
最终判断很简单:如果世界模型不能在闭环里提升动作选择、风险识别或数据回流,它还只是预测模型或生成模型;只有当它改变系统决策质量时,才算通过验收。
外部精读
- 本页来源台账:记录本页事实来源、图片使用和中文讲法参考。
- WorldArena 2.0:理解最新 embodied world model 评测为什么从视觉扩展到触觉、交互式 RL 环境和多平台。
- World-in-World:理解 closed-loop world model benchmark 为什么要把任务成功率放到核心位置。
- WorldArena:理解感知质量、功能用途和人类偏好如何组合成世界模型评测框架。
- VBench:理解视频生成评测维度;使用时要保留“视频质量不等于动作 utility”的边界。
- On Calibration of Modern Neural Networks:理解风险分数为什么需要校准,而不是只看分类或预测准确率。
- Title: 世界模型:评测:不要让好看的未来骗过决策系统
- Author: Charles
- Created at : 2026-03-09 09:00:00
- Updated at : 2026-03-09 09:00:00
- Link: https://charles2530.github.io/2026/03/09/ai-files-world-models-evaluation-and-failure-modes/
- License: This work is licensed under CC BY-NC-SA 4.0.