
VLM/VLA:架构:视觉表征、连接器与记忆
VLM 的第一件事不是“让 LLM 看到图片”,而是把图片变成一串模型能处理的 token,再把这些 token 和语言对齐。若继续走向 VLA 和世界模型,这些 token 还要保留动作、接触、遮挡和时间变化。
这页先回答“VLM 架构:视觉表征、连接器与记忆”在「VLM/VLA」里的位置:它解决什么局部问题,依赖哪些前置,最后会影响哪类工程或研究判断。
前置:先分清 token、embedding、attention 和评测指标;动作相关问题可跳到 VLA 专题。 必要时先回 VLM/VLA 入口、基础知识 或 术语表。
主线关系:把视觉表征、语言模型接口、视频记忆和动作策略连起来,看多模态系统怎样从“看懂”走向“可行动”。
一张图片进入 VLM,通常会经历四步:像素切成 patch,patch 变成视觉 token,视觉 token 通过连接器进入语言模型,多帧视觉再被压成带记忆的状态。读公式前先把这四步放进脑子里。
本页公式使用的 都可以在 符号与最小数学地图 里查。
从像素到视觉 token
先把图像写成一个数组:
| 符号 | 含义 | 红杯例子 |
|---|---|---|
| 输入图像 | 桌面相机拍到的画面 | |
| 图像高度和宽度 | 例如 或 | |
| 通道数 | RGB 通常是 3 |
把图像切成 patch 后,patch 数量是:
| 符号 | 含义 |
|---|---|
| patch 边长 | |
| patch token 数 |
读作什么:图像越大、patch 越小,视觉 token 越多。
红杯例子: 图像用 patch,会得到 个视觉 token。若是 4 路相机、16 帧历史,就会变成 个视觉 token。
这个公式不说明什么:token 多只表示输入更细,不代表模型一定保留了杯沿、夹爪接触点和遮挡前位置。
每个 patch 会被展平并投影到隐藏维度:
| 符号 | 含义 |
|---|---|
| 第 个图像 patch | |
| patch 投影矩阵 | |
| 位置编码,让模型知道 patch 在图像中的位置 | |
| 第 个视觉 token embedding |
视觉 encoder 再处理整个 token 序列:
读作什么:视觉 encoder 把一组 patch token 变成更高层的视觉特征 。
CLIP:建立静态图文语义空间
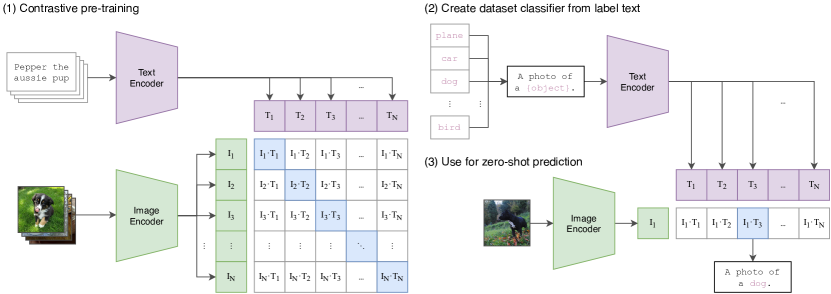
图源:Learning Transferable Visual Models From Natural Language Supervision,Figure 1。原论文图意:用图像编码器和文本编码器把图文对拉到同一表示空间,并把类别文本 prompt 当作 zero-shot 分类器。
先看哪里:左边一批图像和一批文本分别进入两个 encoder,中间比较所有图文对的相似度。
它证明什么:图像和文本可以被放进同一个 embedding 空间,正确图文对更接近。
它不证明什么:它不学习动作、接触、时间记忆和动作后果。
和红杯例子的关系:CLIP 可以帮模型知道“red mug”和红杯图片相似,但不会告诉机械臂如何抓杯子。
CLIP 常用余弦相似度比较图像向量 和文本向量 :
| 符号 | 含义 |
|---|---|
| 图像 encoder 输出的向量 | |
| 文本 encoder 输出的向量 | |
| 向量内积 | |
| 向量长度 | |
| 图文相似度 |
读作什么:两个向量方向越接近,相似度越高。
这个公式不说明什么:相似度高只说明语义匹配,不说明空间位置、可达性和物理风险。
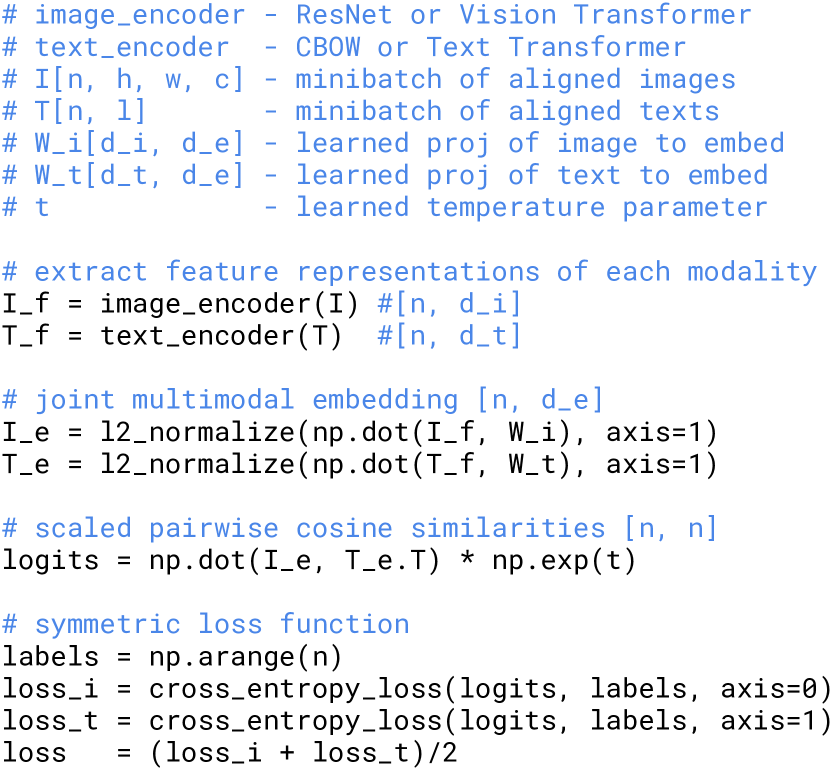
图源:Learning Transferable Visual Models From Natural Language Supervision,Figure 3。原论文图意:展示 CLIP 图像编码器和文本编码器的批内相似度矩阵、对称 cross entropy 目标,以及 zero-shot classifier 的构造方式。
先看哪里:相似度矩阵的对角线。一个 batch 里正确图文对在对角线上,其余位置是负样本。
它证明什么:训练目标让正确图文对排名靠前,让错误配对靠后。
它不证明什么:这个目标不要求模型生成回答,更不要求模型控制机器人。
和后续关系:它提供静态语义坐标系,后面还要接连接器、视频状态和动作接口。
BLIP-2:连接器是视觉信息瓶颈
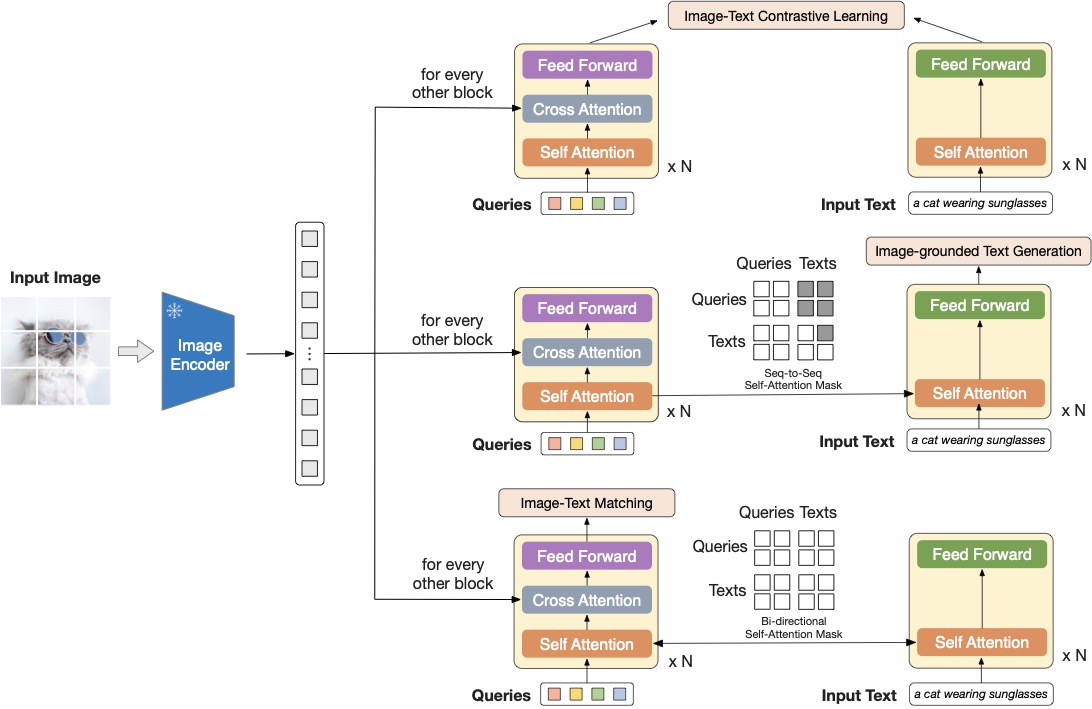
图源:BLIP-2: Bootstrapping Language-Image Pre-training with Frozen Image Encoders and Large Language Models,Figure 2。原论文图意:冻结图像编码器,用查询式连接模块抽取视觉信息,并分别服务 image-text contrastive learning、image-grounded text generation 和 image-text matching。
先看哪里:中间的 learnable query。它们像少量问题,主动从大量视觉 token 里读取信息。
它证明什么:连接器可以把视觉信息压成较少 token,再交给语言模型。
它不证明什么:为图文问答压缩出的信息,不必然保留抓取点、接触边界和动作后果。
和红杯例子的关系:如果 query 只记住“这是红杯”,却丢掉杯沿位置和夹爪距离,VQA 可能没问题,VLA 会抓偏。
常见连接器可以抽象成:
| 符号 | 含义 |
|---|---|
| 视觉 encoder 输出的视觉特征 | |
| learnable query 或文本侧查询 | |
| 连接器,例如 projector、Q-Former、resampler 或 cross-attention | |
| 交给 LLM、policy 或 world model 的压缩视觉 token |
读作什么:连接器从大量视觉特征里抽取后续模型最需要的信息。
这个公式不说明什么:它没有定义“最需要”到底是什么。VLM 需要回答问题,VLA 需要动作可执行,世界模型需要未来可预测,这三者的信息需求不同。
| 连接方式 | 初学者理解 | 常见风险 |
|---|---|---|
| 线性 projector | 把视觉特征映射到 LLM embedding 空间 | 简单但选择信息能力弱 |
| Q-Former / resampler | 用少量查询主动抽取视觉证据 | 查询数量和训练目标决定瓶颈 |
| Cross-attention | 文本或策略 token 按需读取视觉 memory | 成本更高,长视频更难 |
| 统一 token 序列 | 图像、文本、动作都放进同一序列 | 训练和推理成本高 |
视频状态:从静态语义走向时间记忆
静态 VLM 解决“这张图里有什么”。VLA 和世界模型还要知道“刚刚发生了什么”和“动作后会怎样”。
可以把状态编码写成:
| 符号 | 含义 |
|---|---|
| 到当前为止的观测历史 | |
| 压缩后的 latent state | |
| 视频或状态 encoder |
读作什么:模型把历史观测压成当前状态。
红杯例子:红杯被机械臂拿起后短暂被夹爪遮挡, 应该仍保留“红杯已在夹爪里”的状态。
这个公式不说明什么:它没有保证 latent 真的记住了关键物体,也没有保证对不同动作敏感。
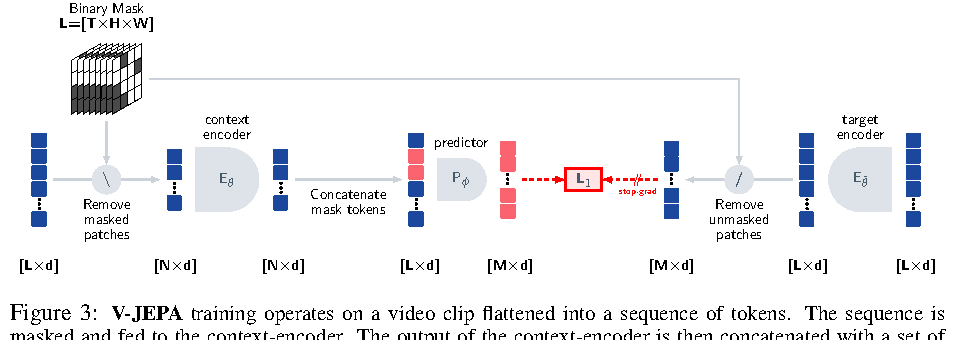
图源:V-JEPA: Latent Video Prediction for Visual Representation Learning,Figure 3。原论文图意:context encoder 只处理 masked video 中未遮挡 token,predictor 用 context output 和 mask tokens 预测 target encoder 对完整视频产生的 masked token representations。
先看哪里:context encoder 只看可见区域,predictor 预测被遮挡区域的 latent 表示。
它证明什么:视频表征可以学习对象、运动和上下文,而不是逐像素复读纹理。
它不证明什么:它缺少动作条件、奖励、风险和 planner 接口,所以还不是完整世界模型。
和红杯例子的关系:它能帮助模型理解红杯在视频中如何持续存在,但还需要动作条件才能预测“抓快了会不会滑”。
从 VLM 到 VLA,再到世界模型
VLA 和世界模型常被两条式子区分:
| 公式 | 读作什么 | 红杯例子 |
|---|---|---|
| 策略根据状态和语言输出动作 | “现在夹爪向红杯移动” | |
| dynamics 预测动作后的下一状态 | “这样抓会让杯子抬起或滑落” |
关键差别:VLA 主要回答“现在做什么”,世界模型回答“做了以后会怎样”。
VLM 能说红杯在桌边。VLA 能输出接近红杯的动作。世界模型还要比较:从侧面推可能把杯子推下桌,从上方夹取更稳。只有第三种能力才进入动作后果建模。
架构选择图
flowchart TD
A["任务需求"] --> B{"只要静态语义?"}
B -- "是" --> C["CLIP / dual encoder"]
B -- "否" --> D{"需要语言生成?"}
D -- "是" --> E["视觉连接器 + LLM"]
D -- "否" --> F{"需要视频状态?"}
F -- "是" --> G["video encoder / latent memory"]
F -- "否" --> H["轻量视觉 encoder"]
G --> I{"需要动作后果?"}
I -- "是" --> J["action-conditioned world model"]
I -- "否" --> K["video understanding / retrieval"]
这张图可以当成选型入口。静态检索不必上复杂 VLA;语言生成需要 connector;视频理解需要 temporal state;只有当系统要比较动作后果时,才真正进入世界模型接口。
检查点
读完这页后,应能回答:
| 问题 | 合格理解 |
|---|---|
| 图像 token 是什么 | patch 或视觉特征被投影成 Transformer 可消费的序列 |
| CLIP 解决什么 | 静态图文语义对齐,不解决动作后果 |
| Q-Former 解决什么 | 从大量视觉 token 中抽取少量语言可用证据 |
| 视频 latent 为什么重要 | VLA 和世界模型需要时序状态,而不是单帧 caption |
| VLA 和世界模型差在哪 | VLA 输出动作,世界模型预测动作后的状态变化 |
- 回到本专题入口:VLM/VLA,确认这页在整条路线中的位置。
- 按导航顺序继续:视觉 Tokenizer 与连接器。
- 概念或符号卡住时,先查 术语表,再回到当前页。
- Title: VLM/VLA:架构:视觉表征、连接器与记忆
- Author: Charles
- Created at : 2026-03-18 09:00:00
- Updated at : 2026-03-18 09:00:00
- Link: https://charles2530.github.io/2026/03/18/ai-files-vlm-architecture-and-training/
- License: This work is licensed under CC BY-NC-SA 4.0.