
世界模型:生成式模拟与视频世界模型
视频世界模型很容易被误读成“更强的视频生成”。但在世界模型语境里,它真正要回答的是:给定历史、动作、目标和场景约束,未来是否会以可验证、可交互、可用于决策的方式演化。
这页先回答“生成式模拟与视频世界模型”在「世界模型」里的位置:它解决什么局部问题,依赖哪些前置,最后会影响哪类工程或研究判断。
前置:先知道潜变量、时序预测、VLM/VLA 与训练效率;再看具体论文和工程案例。 必要时先回 世界模型入口、基础知识 或 术语表。
主线关系:把表征预测、潜变量动力学、规划、rollout 服务和具身/视频应用连成“可模拟、可评估、可行动”的主线。
本页按四步讲:
- 从视频生成底座开始。
- 加入动作条件。
- 改造成可交互 rollout。
- 用评测门禁证明它不是只会生成好看视频。
普通视频生成关心“看起来像未来”;视频世界模型还要关心“这个未来是否由动作造成、能否保持长时一致、能否帮助规划和风险判断”。
行车记录仪能播放过去发生了什么;驾驶模拟器必须回答“我现在刹车、并线、加速,会发生什么”。视频世界模型要往后者靠。
从视频生成到底缺什么
普通视频生成常建模:
其中 是视频帧或视频 latent, 是文本、图像、风格或场景条件。这个目标能学到视觉质量、物体外观和一般运动规律,但它还不是可规划世界模型。
视频世界模型至少要进一步建模:
这里 是动作, 可以是风险、不确定性、可达性、碰撞或成功概率。核心变化是动作条件:固定同一段历史时,换动作应该换未来。
| 普通视频生成 | 视频世界模型 |
|---|---|
| 生成视觉上自然的未来 | 生成动作条件下的未来 |
| 可以只服务展示 | 要服务规划、风险、人审或数据回流 |
| 常离线生成 | 需要考虑交互延迟和 rollout 成本 |
| 评测偏视觉质量 | 评测还要看动作一致性和闭环收益 |
路线一:先继承视频生成底座
大规模视频模型已经学到很多昂贵先验:物体外观、运动连续性、场景布局、光照和短中程时序。当前很多视频世界模型不是从零训练,而是在视频生成底座上继续训练动作、交互、长记忆和因果 rollout。
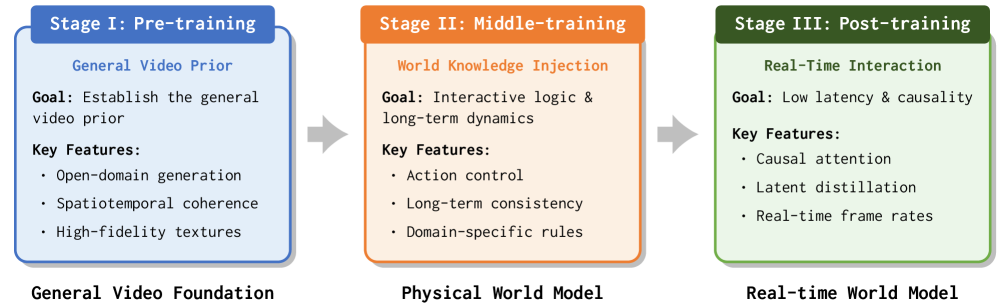
图源:Advancing Open-source World Models,Figure 4。原论文图意:LingBot-World 从 foundation video generator 出发,经过 pre-training、middle-training 和 post-training,逐步获得通用视频先验、交互逻辑/长时动态和低延迟因果交互能力。
输入输出:输入从通用视频数据逐步扩展到交互数据、控制信号和长序列;输出从普通视频续写逐步变成可交互模拟。
关键模块:video foundation model 提供视觉和时序先验,middle-training 注入交互和长时一致性,post-training 处理因果化和低延迟。
公式对应:从 走向 。
容易误读:继承视频底座不等于已经懂动作;动作数据、因果结构和评测门禁仍然是分水岭。
这类路线通常分三阶段:
| 阶段 | 训练重点 | 从视频模型到世界模型的变化 |
|---|---|---|
| 视频基础模型 | 视觉质量、开放域语义、短中程时序 | 先学“世界看起来怎样” |
| 中程训练 | 真实视频、游戏录屏、合成轨迹、动作/相机控制 | 开始学习“动作如何改变未来” |
| 因果化与蒸馏 | 因果 attention、KV cache、少步生成 | 从离线长视频转向低延迟交互模拟 |
路线二:动作条件进入模型内部
动作可以是键盘输入、相机轨迹、机器人关节动作、末端位姿、离散技能、语言子目标或工具调用。动作条件不是写在 prompt 里就够了,它必须能改变模型内部的生成路径。
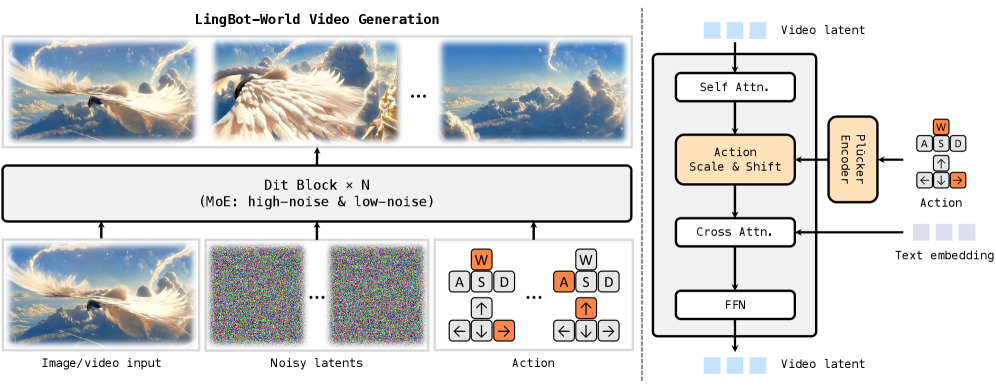
图源:Advancing Open-source World Models,Figure 5。原论文图意:左侧展示图像/视频、噪声 latent 和用户动作如何共同生成具备空间记忆、长时一致性和动作跟随的视频;右侧展示 DiT block 中 self-attention、Plucker action embedding、adaptive normalization 与 text cross-attention 的组织方式。
输入输出:输入是历史图像/视频、噪声 latent、文本和用户动作;输出是动作跟随的视频未来。
关键模块:action embedding、adaptive normalization、self-attention 和 text cross-attention 共同影响去噪路径。
公式对应: 出现在条件里,而不是只作为生成后再解释的标签。
容易误读:如果动作只是弱 prompt,模型可能仍靠视频惯性生成平均未来;真正要验证的是反事实动作分叉。
动作条件的最小测试很简单:
1 | 固定同一历史画面 |
如果三组未来几乎一样,模型可能只是普通视频续写器。
如果未来分叉合理,但不能被 planner 使用,它仍只是动作条件预测器。
如果接入 planner 后成功率或风险控制变好,才进入世界模型证据层。
路线三:从离线生成到可交互 rollout
普通视频生成可以整段视频一起生成;可交互世界模型必须逐步向前,持续接收用户或 agent 的动作,并保持环境一致性。这里会遇到 train-test gap:训练时模型可能看完整片段,推理时却只能看过去。
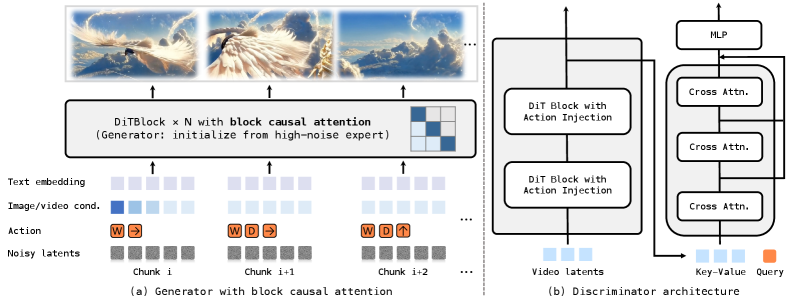
图源:Advancing Open-source World Models,Figure 6。原论文图意:该图说明 causal generator adaptation 和 discriminator architecture;前者用 block causal attention 支持流式自回归生成,后者在长时训练中通过 GAN classification head 与 cross-attention 缓解累积漂移。
输入输出:输入从完整视频上下文变成只能依赖过去和当前 chunk 的流式上下文;输出是一段段向前滚动的视频。
关键模块:block causal attention、KV cache、长时 discriminator 和少步生成共同服务低延迟 rollout。
公式对应:推理时要近似 ,不能偷看未来帧。
容易误读:能长视频生成不等于能交互;交互需要每一步动作都能改变后续 rollout。
在线使用时要分清三条链路:
| 链路 | 频率 | 适合输出 |
|---|---|---|
| 高频控制 | 毫秒级 | 不适合昂贵视频采样,通常需要传统控制或轻量 policy |
| 中频规划 | 低 Hz 到数 Hz | latent rollout、低分辨率未来、风险排序 |
| 低频分析 | 离线或人审 | 高清视频、反事实回放、数据标注 |
视频解码不一定发生在控制主路径。主路径更需要的是哪个动作更安全、更可达、更可能完成任务。
三种系统用法
5.1 在线规划
机器人可以对多条候选轨迹做短 horizon rollout,筛掉会碰撞、会滑落、会遮挡关键物体的动作。自动驾驶可以比较刹车、让行、变道的未来风险。
5.2 反事实与失败回放
真实危险事件稀有、采集成本高、复现困难。视频世界模型可以回答:如果当时慢一点、换一条路径、先移动另一个物体、不要执行某个工具调用,会不会避免失败。
5.3 数据引擎
模型可以生成相邻反事实、扩增长尾场景、辅助人工标注和错误归因。但合成数据不能直接信任,必须经过真实数据校准、failure replay 和 closed-loop evaluation。
评测门禁:不要只看好看视频
| 评测层 | 关注点 | 最小问题 |
|---|---|---|
| 视觉层 | 清晰、连续、物体不乱跳 | 看起来是否合理 |
| 动力学层 | 接触、遮挡、碰撞、速度 | 物体是否按动作后果变化 |
| 动作层 | 固定历史换动作 | 未来是否合理分叉 |
| 任务层 | 接入 planner/policy | 成功率、恢复率是否提升 |
| 风险层 | near-miss、碰撞、不确定性 | 危险未来是否被低估 |
| 系统层 | latency、显存、吞吐 | 是否能进入真实链路 |
如果方法声称是 VAM/WAM/视频世界模型,还应额外报告:
action sensitivity:不同动作是否改变未来。candidate ranking agreement:预测最优动作是否和真实结果一致。temporal consistency:长时 rollout 中对象身份、地图结构和目标状态是否保持。risk calibration:危险未来是否被低估。cost per success:增加 rollout 成本后,单位成功成本是否下降。
常见失效模式
| 失败 | 表现 | 伤害 |
|---|---|---|
| 视觉上对,动力学上错 | 画面自然但接触、摩擦、碰撞不对 | planner 选错动作 |
| 动作被历史惯性淹没 | 换动作后未来差异很小 | 反事实和规划失效 |
| 长时重造世界 | 地标、房间结构、物体身份漂移 | 数据回流污染策略 |
| 只生成平均未来 | 稀有危险分支被抹掉 | 风险低估 |
| 采样太慢 | 每个候选动作都要多步扩散 | 无法在线规划 |
| 自生成偏差回灌 | 合成数据越来越像模型自己 | 策略适应模拟器而非现实 |
与 RSSM/JEPA/WAM 的关系
| 路线 | 这里如何连接 |
|---|---|
| RSSM / Dreamer | 提供“latent rollout 服务决策”的经典基线,提醒视频路线也要证明 planning utility |
| Masked / JEPA | 提供更省的表征和 token 接口,视频世界模型可只在需要时解码 |
| WM / WAM / VAM | 视频路线要说明动作是条件、输出还是联合变量 |
| 数据引擎 | 生成式模拟最有价值的输出常是反事实、失败回放和 hard negatives |
| 推理/量化 | 可交互 rollout 需要 KV cache、因果化、少步生成和低延迟系统 |
Claim Ledger
| Claim | Source | Evidence Type | Can Support | Cannot Prove |
|---|---|---|---|---|
| 视频基础模型可作为世界模拟器的起点 | LingBot-World 专题 | Official / Paper Claim | 继续训练视频底座是可行工程路线 | 视频底座天然具备动作因果 |
| 动作条件必须进入模型内部并通过反事实验证 | 本页机制归纳 | Site Inference | 解释为什么 prompt 弱条件不够 | 不能替代具体系统的 closed-loop 证据 |
| 因果化、KV cache 和少步生成是交互 rollout 的关键系统问题 | LingBot-World、CausVid | Paper / System Evidence | 视频 world model 需要低延迟流式推理 | 低延迟本身会提升规划质量 |
落地清单
设计视频世界模型系统时,先填这张表:
| 问题 | 决策 |
|---|---|
| 输出服务谁 | 人审、数据增强、策略训练、在线规划、风险评估 |
| 动作表示是什么 | 连续控制、离散技能、相机轨迹、语言子目标、工具调用 |
| 主路径输出什么 | latent、低分辨率未来、风险分布、候选排序、高清视频 |
| 频率预算是多少 | 高频控制、中频规划、低频分析分别多快 |
| 评测门禁是什么 | action sensitivity、closed-loop success、risk calibration、latency |
| 合成数据怎么标记 | 来源、置信度、适用范围、失败桶、人工复核状态 |
最直接的判断是:如果一个视频世界模型不能让系统更好地选择动作、发现风险或构造有价值的反事实,那它还只是视频生成模型;只有当它改变规划、训练和数据回流决策时,才真正进入世界模型工程范畴。
- 回到本专题入口:世界模型,确认这页在整条路线中的位置。
- 按导航顺序继续:机器人与自动驾驶中的世界模型。
- 概念或符号卡住时,先查 术语表,再回到当前页。
- Title: 世界模型:生成式模拟与视频世界模型
- Author: Charles
- Created at : 2026-04-07 09:00:00
- Updated at : 2026-04-07 09:00:00
- Link: https://charles2530.github.io/2026/04/07/ai-files-world-models-generative-simulation-and-video/
- License: This work is licensed under CC BY-NC-SA 4.0.