
世界模型:高效训练技术路线图
这页是全站的主线枢纽:如何在有限真实交互、有限视频 token、有限 GPU-hour 和有限验证预算下,训练出对动作敏感、能长时 rollout、能改善决策的世界模型。
它不是要替代基础知识、训练、推理、量化、算子、VLM/VLA 或具身智能章节。相反,这些章节都被放到同一条主线下:它们分别解决世界模型训练中的不同成本项。
主线是世界模型高效训练,但这不是说其它内容不重要。基础知识提供公共语言,训练/推理/量化/算子提供工程能力,VLM/VLA 和具身智能提供状态、动作、数据和闭环场景。读的时候先抓主线,再按需要回到支撑专题补工具。
中心问题
一个面向决策的世界模型至少要回答:
其中 是潜状态, 是未来观测或视频, 是动作, 是奖励或任务进展, 是终止/失败信号, 是不确定性或风险。高效训练真正关心的不是公式本身,而是以下问题:
- 真实交互能不能少一些。
- 视频 token 和上下文长度能不能少一些。
- 动作条件能不能更有效地进入模型。
- 长时 rollout 能不能稳定又便宜。
- 训练和推理能不能用更低显存、更低通信和更低延迟跑起来。
- 评测能不能证明预测真的改善了决策。
七条效率轴
| 效率轴 | 省的是什么 | 核心技术 | 对应专题 |
|---|---|---|---|
| 数据效率 | 真实交互、人工标注、失败采集 | 示范数据、near-miss、失败回流、合成 rollout、数据门禁 | 世界模型数据引擎、具身智能 |
| 表示效率 | 像素重建、视觉 token、长视频冗余 | VLM 连接器、视频 tokenizer、latent state、RSSM/JEPA | VLM/VLA、RSSM/Dreamer |
| 动作效率 | 动作序列长度、条件无效、反事实样本浪费 | action token、动作 chunk、WAM/VAM、动作敏感评测 | WM/WAM/VAM、VLA 专题 |
| 长序列效率 | attention 计算、显存、padding、通信 | sequence packing、block-causal mask、context parallel、MagiAttention | 训练、MagiAttention |
| 数值效率 | 权重/激活/KV 显存、带宽、通信 payload | BF16、FP8、FP4/QAT、KV 量化、混合精度保护 | 低比特训练、量化 |
| Rollout 效率 | 推理延迟、生成步数、KV 生命周期 | causalization、KV cache、few-step diffusion、DMD/consistency distillation | 推理、扩散蒸馏 |
| 验证效率 | 无效 demo、人眼主观判断、线上试错 | action sensitivity、temporal consistency、risk calibration、cost per successful rollout | 世界模型评测、多模态评测 |
成本账:先把“高效”拆成可估算数字
读任何方法前,先不要急着问“是不是最新”。更稳的做法是把它放进同一张成本账:它到底减少了哪一项,是否把成本转移到了另一项。
| 成本项 | 粗略估算方式 | 常见放大因子 | 优先回看 |
|---|---|---|---|
| 真实交互 | 机器人小时数、环境重置次数、人工接管次数、失败回放时长 | reset 慢、长尾任务少、near-miss 没成桶 | 世界模型数据引擎 |
| 视频 token | 相机数 帧数 每帧 patch/token 数 压缩率 | 多相机、长 horizon、高分辨率、无选择性 resampler | 视觉 Tokenizer |
| 长序列训练 | 有效序列长度、padding 率、attention mask 复杂度、通信 payload | 变长轨迹、block mask、跨样本 packing、context parallel | 训练系统、MagiAttention |
| 动作条件 | 动作频率 horizon / chunk size,动作和观测时间戳误差 | 高频控制、动作太细、坐标系不统一、动作记录延迟 | 动作表示与控制接口 |
| 数值显存 | 权重、激活、optimizer state、KV cache、通信 buffer 分别计算 | 低比特 kernel 未命中、敏感模块误压、KV 比权重更早爆 | 低比特训练、量化 |
| Rollout 推理 | 采样步数多、KV 生命周期长、长短请求混排、risk head 旁路慢 | 推理成本建模 | |
| 闭环验证 | 场景桶数 rollout 次数 重复实验 人审/真机成本 | 只看 demo、没有反事实动作、失败样本不回流 | 世界模型评测 |
一个方法如果说自己“高效”,至少要能填出:节省哪一项、增加哪一项、证据是什么、失败时怎么回滚。比如视觉 tokenizer 省 token,但可能丢接触状态;KV 量化省显存,但可能伤长时一致性;少步视频生成省 rollout 延迟,但可能让 action sensitivity 下降。
硬证据模块:每条主线都要能落到六格表
这页后面的所有“高效”判断,都应尽量收敛到同一套硬证据模块。它不是要求每页都做大型实验,而是要求读者能看清:这里是在解决哪项成本,有没有最小可复算例子,失败时会暴露什么,证据等级在哪里,边界是什么,验收指标是什么。
| 模块 | 必须回答 | 最小证据 | 更强证据 |
|---|---|---|---|
| 本页解决哪项成本 | 数据、token、显存、通信、rollout、验证中的哪一项 | 一张成本账 | 真实 step time / latency / GPU-hour 对比 |
| 最小可复算例子 | 输入数据、配置、输出和指标能否复跑 | fixture + 脚本 | 固定 checkpoint + 固定 seed + CI 回归 |
| 失败案例 | 这项技术会在哪类 hard case 上坏 | 一条 failure replay | 失败桶统计和人工复核 |
| 论文或日志证据 | 结论来自 benchmark、ablation、throughput、closed-loop 还是 demo | 明确证据等级 | 独立复现或线上灰度日志 |
| 反例和适用边界 | 什么时候收益会消失或变成风险 | 边界表 | 跨任务/跨硬件分桶结果 |
| 验收指标 | 怎么判定它真的服务世界模型 | action sensitivity、risk calibration、drift、cost per success | 闭环成功率和成本收益同时过门禁 |
本站的最小可复算样例放在 动作条件视频世界模型端到端训练案例 的“可复算 mini-chain”小节。它用 episodes.jsonl -> token stats -> training-config.yaml -> rollouts.jsonl -> eval_mini_chain.py 串出一个小链路。它不是生产证据,但给出了页面应该追求的证据形状:读者不只看到“应该这样做”,还可以复算“这一页的指标从哪里来”。
主线定位框模板
后续打磨主线 12 页和关键支撑页时,页面开头尽量补一个相同口径的定位框。它不需要很长,但要让读者在 30 秒内知道这页为什么存在。
| 字段 | 写法 |
|---|---|
| 本页解决的成本 | 视频 token、真实交互、KV 显存、rollout 延迟、验证成本、通信或训练显存 |
| 核心风险 | 这项技术最可能伤什么:动作敏感性、风险召回、长时一致性、吞吐、恢复语义 |
| 读完要能判断 | 读者应该能做出的工程判断 |
| 适合接到 | 下一页、相邻专题或论文专题 |
示例:
1 | 本页解决的成本:KV 显存和长上下文 rollout 延迟 |
算一遍:4 路相机、16 帧、32k context 的账
下面这个例子不是推荐配置,而是给“世界模型高效训练”一个数量级锚点。假设系统输入 4 路相机、每路 16 帧,视觉 encoder 用 14x14 patch,主干上下文上限是 32k token,batch size 是 16,模型有 32 层、32 个 attention heads、GQA 下 8 个 KV heads,head dim 是 128。
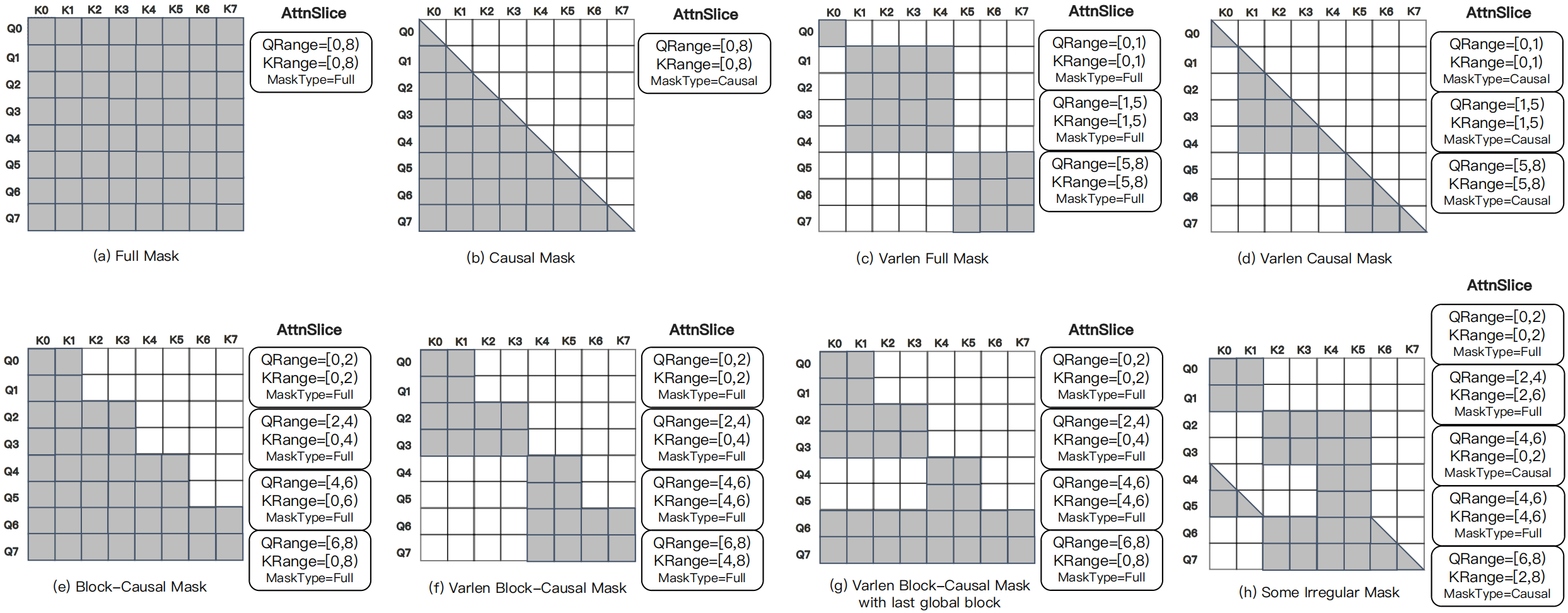
图源:MagiAttention: A Distributed Attention System for Hyper-Scale Long Context Training,Figure 4。原论文图意:不同样本和不同任务会产生异构 attention mask,长上下文训练的难点不只是序列长,还包括 mask 结构、负载均衡和通信调度。
第一步:视频 token 是否装得进上下文。
| 单帧分辨率 | 每帧 patch token | 4 路相机 x 16 帧 token | 对 32k context 的含义 |
|---|---|---|---|
224x224 |
16x16 = 256 |
16,384 |
还能留下约 16k 给文本、状态、动作、历史和特殊 token |
336x518 |
24x37 = 888 |
56,832 |
已经超过 32k,必须做 resampler、ROI、降帧或压缩 |
448x448 |
32x32 = 1,024 |
65,536 |
只放视觉 token 就爆掉,更别说动作和语言 |
这说明多相机世界模型常见的第一个瓶颈不是“模型懂不懂视觉”,而是 token 入口就已经把 context 挤满。高效训练里的视觉 tokenizer、frame selector、query resampler 和 latent state,都是在解决这一步。
第二步:KV cache 到底有多大。
对自回归 rollout 来说,每层 KV cache 的近似大小是:
代入 :
| KV 设计 | 每层 KV | 32 层 KV | 和 FP16 GQA 比 |
|---|---|---|---|
| GQA KV FP16/BF16 | 2 GiB |
64 GiB |
1.0x |
| GQA KV INT8 | 1 GiB |
32 GiB |
0.5x |
| 标准 MHA KV FP16/BF16 | 8 GiB |
256 GiB |
4.0x |
| 标准 MHA KV INT8 | 4 GiB |
128 GiB |
2.0x |
如果把 attention score 矩阵朴素 materialize,一层就是:
这也是为什么 FlashAttention、context parallel、MagiAttention 这类方法不是“锦上添花”。没有它们,score 矩阵和 KV 生命周期会先把显存、带宽和通信打爆。
第三步:吞吐下限由 KV 读取决定。
假设长上下文 decode 时,每生成一个 token 都要读完整历史 KV,且有效 HBM 带宽按 3 TiB/s 粗估:
| KV 路线 | 单步要读的 32 层 KV | 仅 KV 读取的理论下限 |
|---|---|---|
| GQA KV FP16/BF16 | 64 GiB |
20.8 ms/token |
| GQA KV INT8 | 32 GiB |
10.4 ms/token |
| 标准 MHA KV FP16/BF16 | 256 GiB |
83.3 ms/token |
| 标准 MHA KV INT8 | 128 GiB |
41.7 ms/token |
真实系统还会叠加 layout、page miss、mask、GEMM、通信和调度开销,所以表里的数字只是乐观下限。但它足以说明一个关键事实:KV INT8 + GQA 不只是省显存,也会直接改变 rollout decode 的带宽下限;相反,如果 kernel 不成熟、scale 读取太碎或质量掉点明显,省下来的显存也可能被延迟和误差还回去。
症状:4 路相机和长历史一接入,batch 开不上去,rollout token/s 下降。
指标观察:visual token 占掉 16k 到 65k,KV cache 从 32 GiB 到 256 GiB 摆动,朴素 score 矩阵一层可到 1 TiB。
技术机制:视觉 patch 决定 ,GQA/MLA/KV 量化决定 KV 宽度,FlashAttention/MagiAttention 决定 score 和 mask 是否能被高效调度。
设计取舍:压 token 会丢细节,压 KV 会引入数值误差,压 mask/packing 会增加系统复杂度。
失败反例:只把 KV 改成 INT8,却没有 fused kernel 和长上下文回归,可能显存下降但 token/s 不升,甚至长时一致性变差。
适用边界:这个账适合估算长上下文自回归 rollout;如果模型是 latent dynamics、短 horizon diffusion 或强 resampler VLM,瓶颈会从 KV 转到 latent decoder、采样步数或视觉压缩质量。
一条推荐学习路径
flowchart LR
A["基础语言: 张量/概率/Attention/优化"] --> B["VLM/VLA: 状态与动作接口"]
B --> C["世界模型: RSSM/Dreamer/WAM/VAM"]
C --> D["数据引擎: 失败/near-miss/反事实"]
C --> E["训练系统: 长序列/低比特/分布式"]
E --> F["推理与 rollout: KV/蒸馏/成本账"]
D --> G["闭环评测: action sensitivity / cost per success"]
F --> G
第一次读可以按这条线推进:
- 先读 世界模型路线图,建立 state、action、rollout、planner 的基本接口。
- 再读 VLM/VLA 与世界模型高效训练接口,理解视觉状态和动作数据从哪里来。
- 接 RSSM、Dreamer 与规划 和 WM/WAM/VAM,分清 latent dynamics、视频未来预测和动作世界模型。
- 进入 世界模型数据引擎,看失败、near-miss、反事实和合成 rollout 如何降低真实交互成本。
- 用 动作条件视频世界模型端到端训练案例 把数据、动作、训练系统、推理和评测串成一条完整链路。
- 按瓶颈回到支撑专题:长序列看训练和算子,显存看量化,实时 rollout 看推理,闭环落地看具身智能。
主线必读 12 页
如果读者只想抓住“世界模型高效训练技术”这一条主线,建议先把下面 12 页读成闭环。其它页面可以作为背景、查阅或论文扩展,不必一开始全刷。
| 顺序 | 页面 | 读完要能回答 |
|---|---|---|
| 1 | 世界模型路线图 | 世界模型和普通视频生成、VLM、VLA 的边界在哪里 |
| 2 | 世界模型高效训练技术路线图 | 高效训练到底省的是数据、token、显存、推理还是验证成本 |
| 3 | VLM/VLA 与世界模型高效训练接口 | 状态、动作、失败回流和闭环验证分别从哪里来 |
| 4 | 视觉 Tokenizer、连接器与信息瓶颈 | 哪些视觉信息该保留,哪些 token 可以省 |
| 5 | 视频表征、状态记忆与长时序压缩 | 视频如何从多帧图片变成可预测状态 |
| 6 | 动作表示与控制接口 | 动作粒度、坐标系、chunk 和控制器如何影响训练成本 |
| 7 | RSSM、Dreamer 与规划 | latent imagined rollout 如何节省真实交互 |
| 8 | WM / WAM / VAM 与动作条件建模 | 动作如何成为未来分叉的条件,而不只是策略输出 |
| 9 | 世界模型数据引擎与自我改进 | near-miss、失败和反事实如何变成高价值训练数据 |
| 10 | 动作条件视频世界模型端到端训练案例 | 一条训练链路如何从数据 schema 跑到闭环评测 |
| 11 | 推理成本建模与 SLO 设计 | rollout、KV、batch 和量化如何进入同一张请求成本账 |
| 12 | 世界模型评测与失效模式 | 如何证明世界模型真的改善决策,而不只是生成好看未来 |
读完这 12 页后,再回到训练、推理、量化、算子和论文页,会更容易判断哪些内容是主线必需,哪些只是某个瓶颈下的工具。
支撑知识怎么保留
这个站不是只保留和世界模型直接相关的页面。保留基础和旁支内容有三个原因:
| 内容类型 | 为什么仍然重要 | 读法 |
|---|---|---|
| 基础知识 | 没有张量、Attention、概率、优化、显存语言,后面每页都会变成硬背术语 | 卡住时回读,不需要一次刷完 |
| 通用训练/推理/量化/算子 | 世界模型最终也要用这些系统能力跑起来 | 带着瓶颈读,例如长序列、KV、FP8、profile |
| 扩散、VLM、强化学习、具身智能 | 它们分别提供生成、状态、策略、动作和闭环场景 | 只追问它们如何服务状态、动作、rollout 和评测 |
| 技术报告和论文专题 | 真实系统往往把多种技术混在一起 | 看效率贡献、证据和不可外推边界 |
换句话说,主线不是删掉旁支,而是给旁支一个阅读位置。
论文页统一追问
读任何论文专题时,都建议补这六个问题:
| 问题 | 目的 |
|---|---|
| 它节省了什么成本 | 数据、token、显存、通信、推理步数、验证成本还是人工成本 |
| 它改变了哪个接口 | 状态、动作、训练目标、attention mask、runtime、评测还是数据引擎 |
| 证据在哪里 | ablation、scaling、系统指标、闭环成功率还是只给 demo |
| 副作用是什么 | 质量掉点、延迟上升、数据污染、动作不敏感、维护复杂度 |
| 能不能接到世界模型 | 是否支持 action-conditioned rollout、长期一致性和闭环消费 |
| 应该读本站哪一页 | 回到对应主题页补背景,而不是孤立记论文名 |
标杆论文连接
| 论文/系统 | 效率贡献 | 读法 |
|---|---|---|
| DreamerV3 | 用 latent imagined rollout 提升样本效率 | 看 RSSM/Dreamer 的内部模拟路线 |
| LingBot-World | 从视频基础模型到实时交互世界模拟器 | 看数据、动作条件、因果化和少步蒸馏如何组合 |
| MagiAttention | 解决超长上下文异构 mask 训练中的并行和通信瓶颈 | 看长视频/长上下文训练如何落到 CP、mask 和 kernel |
| CausVid | 把视频扩散推向流式 causal rollout | 看视频生成模型如何服务实时世界模拟 |
| π0.5 | 把 web 语义、机器人数据和动作专家合到开放世界 VLA | 看 VLA 如何给世界模型提供动作和闭环信号 |
最小判断框架
一个新方法如果想进入这条主线,至少要回答:
- 它是否让世界模型更少依赖真实交互。
- 它是否减少视频 token、长序列或显存压力。
- 它是否让未来预测对动作更敏感。
- 它是否能被 policy、planner、risk module 或数据引擎消费。
- 它是否有闭环指标,而不只是视觉 demo。
如果只能让生成视频更好看,却无法说明动作、成本和决策收益,它可以放在生成模型背景里,但还不能算世界模型高效训练的核心贡献。
- Title: 世界模型:高效训练技术路线图
- Author: Charles
- Created at : 2026-04-30 09:00:00
- Updated at : 2026-04-30 09:00:00
- Link: https://charles2530.github.io/2026/04/30/ai-files-world-models-efficient-training-roadmap/
- License: This work is licensed under CC BY-NC-SA 4.0.