
世界模型:不确定性与风险敏感规划
世界模型如果只输出一个“最可能的未来”,在高风险决策里往往不够。机器人、自动驾驶和复杂 agent 系统真正关心的不只是平均回报最大,而是在不确定未来里哪些动作更安全,哪些动作期望高但尾部风险不可接受。
不确定性建模与风险敏感规划,是把世界模型从平均预测器提升为安全决策工具的关键。
风险规划不是只看平均收益,而是看坏情况会不会不可接受。一个动作 90% 情况下成功、10% 情况下严重事故,平均分可能不错,但部署上不一定能接受。
平均来看,闯黄灯可能快几秒;但如果少数情况会和车冲突,理性决策会更保守。风险敏感规划就是让模型不仅看“多数未来”,也看“尾部危险未来”。
硬证据模块:风险页要优先证明“不漏报危险”
风险敏感规划最需要硬证据,因为平均指标很容易掩盖尾部事故。这里的证据重点不是 reward 最高,而是高风险动作是否被正确降权、低置信状态是否触发重新观察或回退。
| 证据项 | 最小可复算例子 | 失败案例 | 验收指标 |
|---|---|---|---|
| 本页解决哪项成本 | 少做真实危险试错,提前过滤高风险候选 | 平均成功率高,但少数滑落/碰撞严重 | near-miss recall、collision rate |
| 风险校准 | 按 risk bin 统计真实 violation rate | predicted risk 0.2 的 fast grasp 实际滑落 | ECE、false negative、Brier score |
| 不确定性动作 | 高 epistemic 时选择 wait/reobserve | 模型不确定却继续执行激进动作 | reobserve trigger precision/recall |
| 候选排序 | 比较 risk-aware score 与真实安全成功动作 | top-1 选择错目标或危险动作 | top-k safe success agreement |
| 证据等级 | 离线 replay、仿真闭环、真机闭环分开写 | 只给 risk heatmap demo | hard replay + closed-loop safety |
mini-chain 中 wm_mini_003 就是风险页的反例:fast_grasp 被模型排到 top-1,但实际事件是 slip。这种失败不一定拉低平均视频质量,却会直接破坏部署安全。风险规划的最低门槛,是让这类 hard-negative 在离线 replay 中被抓出来。
平均最优不等于可部署
若只优化期望回报:
策略可能偏向高收益但高风险动作。自动驾驶里激进并线大多数情况下节省时间,但少数情况下可能造成严重事故;机器人快速抓取平均更快,但偶尔会撞翻易碎物体。
研究问题常是“平均表现能不能更好”,部署问题常是“最坏那几次会不会出事”。世界模型一旦用于规划,这个差别必须显式建模。
两类不确定性
| 类型 | 含义 | 决策含义 |
|---|---|---|
| Aleatoric uncertainty | 环境本身随机,即使模型完美也不能消除 | 需要保守决策、风险约束和多模态未来 |
| Epistemic uncertainty | 模型因数据不足或分布外状态而不知道 | 需要更多观察、数据回流、回退或人工接管 |
世界模型的不确定性可能来自观测编码、潜状态后验、动力学预测、奖励/成本头、多模态未来、长时 rollout 误差和规划器搜索到的分布外动作。
如果系统只输出单条未来轨迹,往往无法表达这些来源,也无法区分“未来本来就随机”和“模型自己没见过”。
分布而非点估计
风险敏感规划需要估计未来分布:
而不是只估计均值。可通过粒子采样、隐变量采样、多头模型、diffusion rollout 或 ensemble 得到多条未来。
单一均值未来会误导规划。例如:
- 90% 概率安全通过;
- 10% 概率撞上障碍。
均值轨迹可能生成一条“介于两者之间”的平滑未来,看起来谁也没撞,但对规划毫无帮助。多模态未来必须以分布、样本或风险边界表达,而不是压成一条平均轨迹。
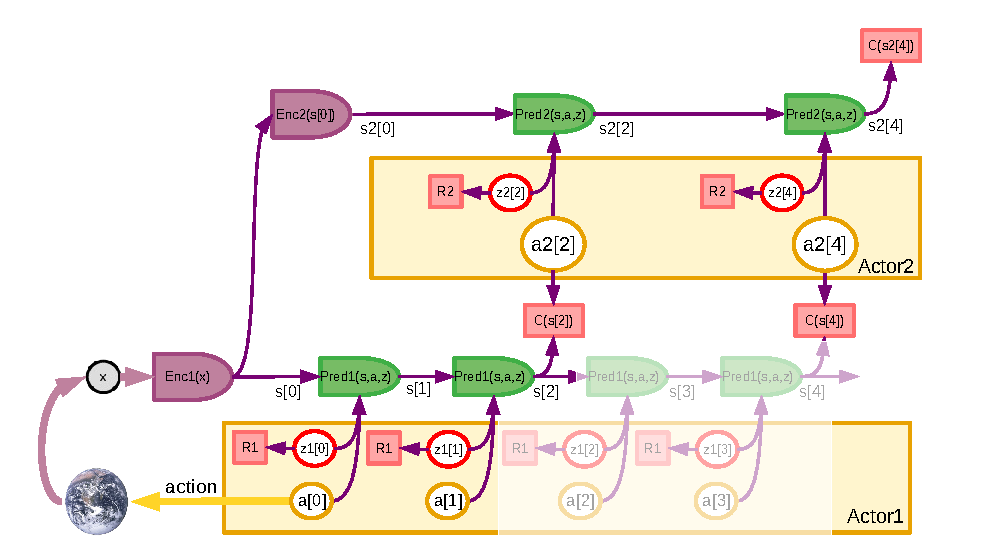
图源:A Path Towards Autonomous Machine Intelligence,Figure 17。原论文图意:用 latent variables 表达不可直接从当前观测确定的未来分支,规划时保留多条可能 trajectory,而不是压成单一未来。
图里的 latent variable 可以理解成“现在还看不见但会影响未来的因素”。如果直接取平均,危险分支可能被抹平;如果保留多个 latent trajectory,planner 才能比较平均收益、尾部风险和信息获取动作。对机器人和驾驶来说,真正有价值的不是最漂亮的未来,而是能把危险分支提前显出来。
Ensemble 与不确定性分解
若使用模型集合 ,预测量为 ,总方差可粗略拆成:
第一项更接近 aleatoric uncertainty,第二项更接近 epistemic uncertainty。实际系统未必严格分离,但这个式子提醒我们:预测发散不一定是环境随机,也可能是模型之间意见不一致。
Ensemble 的优点是实现直接、对分布外状态敏感、可同时用于风险估计和数据回流;局限是成本更高,且如果所有模型共享同样偏差,分歧也可能很小。
风险目标
风险敏感规划不只有一种目标。
| 目标 | 形式 | 适合场景 |
|---|---|---|
| 均值减方差 | 简单风险惩罚 | |
| CVaR | 关注最差 分位回报 | 尾部事故敏感系统 |
| Chance constraint | 有明确安全红线 | |
| Robust / min-max | 高不确定或对抗扰动 | |
| Risk-aware MPC | 在线规划与滚动优化 |
方差简单但不一定代表事故风险;CVaR 更关注尾部;chance constraint 适合碰撞概率、违规概率这类硬约束;robust 目标更保守,但在失败代价极高时值得考虑。
规划器如何使用不确定性
不确定性不是观赏用指标,必须变成动作选择或回退策略。常见用法包括:
- 对同一动作序列采样多条未来,比较平均回报、最差回报、风险分位和约束违反率;
- 在 MPC 目标中加入 uncertainty penalty 或 risk cost;
- 当 epistemic uncertainty 高时,选择信息获取动作,如减速、重新观察、多看一帧;
- 当风险超过阈值时,切换保守模式、人工接管或回到安全状态;
- 将高不确定状态写回数据引擎,作为下一轮采样重点。
如果系统没有“高不确定时怎么办”的动作,那么不确定性输出就不是决策能力,只是监控信号。
风险规划流程图
flowchart LR
A["当前 belief state"] --> B["候选动作序列"]
B --> C["世界模型采样多条未来"]
C --> D["reward / risk / uncertainty"]
D --> E{"风险是否超阈值?"}
E -- "是" --> F["重新观察 / 保守动作 / 接管"]
E -- "否" --> G["选择期望收益最高动作"]
F --> H["数据回流"]
G --> I["执行并观测"]
I --> A
这张图强调:风险不是报告末尾的一个分数,而是动作选择的一部分。高 epistemic uncertainty 时,系统可能应该先获取信息;高 aleatoric risk 时,系统应该选择更保守动作;risk head 低估时,则必须触发数据回流和校准。
一个数字例子:均值收益会误导
| 动作 | 成功收益 | 失败代价 | 失败概率 | 期望回报 | 风险判断 |
|---|---|---|---|---|---|
| 快速抓取 | +10 | -80 | 8% | +2.8 | 尾部风险高 |
| 慢速接近 | +7 | -20 | 3% | +6.2 | 更适合部署 |
| 重新观察 | +3 | -2 | 1% | +2.95 | 信息不足时合理 |
如果只看“成功时收益”,快速抓取最好;如果看期望回报,慢速接近更好;如果 epistemic uncertainty 很高,重新观察可能最安全。风险敏感规划的价值就在于把这些取舍显式化。
长时 Rollout 与校准
即使单步预测方差小,长时 rollout 后不确定性也会扩大。规划器要关注 horizon 上的不确定性增长,而不是只看一步误差。
验收时建议看:
- 不同 horizon 的预测误差和风险召回;
- 不确定性是否校准,即高不确定区域是否真的更容易出错;
- 风险头是否能提前发现 near-miss;
- OOD 场景下 epistemic uncertainty 是否升高;
- 加入风险目标后平均收益、尾部事故和保守程度的 tradeoff;
- 风险阈值触发的回退是否可解释、可复现、可运营。
风险敏感世界模型的目标不是永远保守,而是在收益、风险、信息获取和回退之间做可控取舍。它真正的价值体现在少数关键分叉:平均未来看起来都还不错,但尾部风险决定系统能不能部署。
- Title: 世界模型:不确定性与风险敏感规划
- Author: Charles
- Created at : 2026-05-12 09:00:00
- Updated at : 2026-05-12 09:00:00
- Link: https://charles2530.github.io/2026/05/12/ai-files-world-models-uncertainty-and-risk-aware-planning/
- License: This work is licensed under CC BY-NC-SA 4.0.