
思考探索:WAM 与 3D 视觉:世界模型从视频想象走向物理闭环
本文关注的问题。
World Action Models与3DV in WM如何从视频想象走向机器人可用的物理闭环。
2026 年具身智能里,世界模型和 WAM 迅速升温,但真正值得追问的不是“又出了哪些新模型”,而是 世界模型到底怎样变成机器人可用的物理闭环。
如果只从概念上讲,WAM 很容易被理解成“视频生成模型加动作头”。但结合 DreamZero、Fast-WAM、PointWorld 和 D4RT 几篇原论文看,事情更细:WAM 的价值不一定在推理时生成一段完整未来视频,而在于训练时让动作、未来状态和世界动态互相约束;3D 视觉的价值也不只是多一个输入模态,而是把未来预测变成深度、位姿、点流、轨迹和风险这些可检查的物理证据。
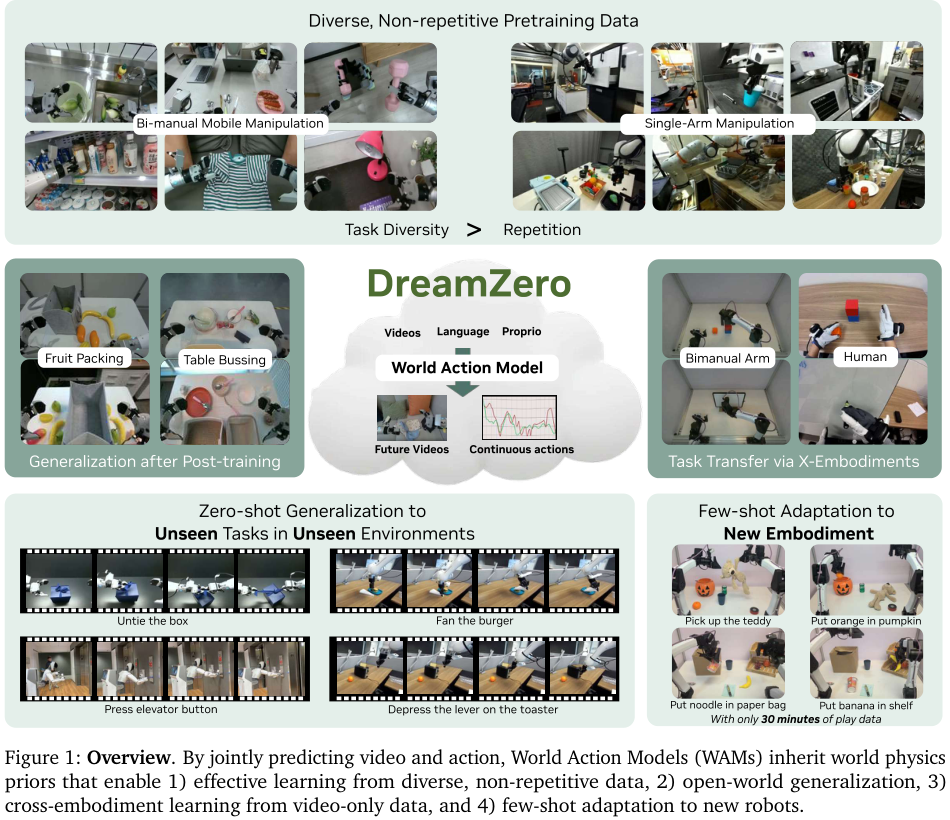
图源:World Action Models are Zero-shot Policies / DreamZero,Figure 1,本站从论文 PDF 截取。原图展示 DreamZero 如何把多样非重复机器人数据、视频、语言、本体状态、未来视频和连续动作放进同一条 WAM 路线。本站读法:先看它的目标不是“生成好看的视频”,而是让视频动态先验服务真实机器人动作泛化。
先把 WAM 和 VLA 分开
VLA 和 WAM 的差异可以先压成两句话:VLA 有强语义理解能力和大量真机部署实例;WAM 有物理动态建模能力和更强场景泛化潜力。这个对比还可以继续往下拆。
VLA 的典型接口是:
1 | 观测 + 语言 -> 动作 |
WAM 的典型接口更像:
1 | 观测 + 语言 + 本体状态 -> 未来世界 + 动作 |
差异不只是输出多了一个未来视频,而是训练信号变了。VLA 可以把动作当成监督标签回归;WAM 则要求动作和未来世界共同成立。一个动作是否合理,要看它是否能解释未来画面、物体运动、接触关系和任务进展。
DreamZero 论文的核心证据也在这里。原文强调,它基于预训练视频扩散 backbone 构建 WAM,通过联合建模 video 和 action,从异构机器人数据中学习技能,而不依赖大量重复演示;论文报告在真实机器人新任务和新环境泛化上相对 VLA 有超过 2 倍提升,并通过系统优化让 14B 自回归视频扩散模型达到 7Hz 闭环控制。这里最关键的不是数字本身,而是证据等级:它不是只展示离线视频,而是把 WAM 放进真实闭环里验证。
中文解读文章也基本抓住了这个点。具身智能观察室的 DreamZero 文章把它解释成从“观测到动作映射”转向“让动作解释未来物理状态”;机器之心转载的分析则提出一个很好的追问:DreamZero 到底是范式突破,还是数据、模型规模、时间上下文和视频辅助监督共同作用的结果。这个问题比简单喊“WAM 取代 VLA”更值得保留。
更稳妥的判断是:WAM 不是 VLA 的替代词,而是动作学习的一种更强约束方式。 语义层面仍需要 VLA / VLM,执行层面仍需要 controller,安全层面仍需要 checker。WAM 的独特位置,是把动作和未来动态绑定起来。
Fast-WAM 的反向提醒:训练时世界建模,推理时未必要想象
Fast-WAM 的关键结论是:训练时视频预测监督比推理时的视频预测先验更重要;为 action prediction 加入未来帧 video tokens,并没有显著增加成功率;推理时不预测视频 tokens,则能显著减少计算开销。
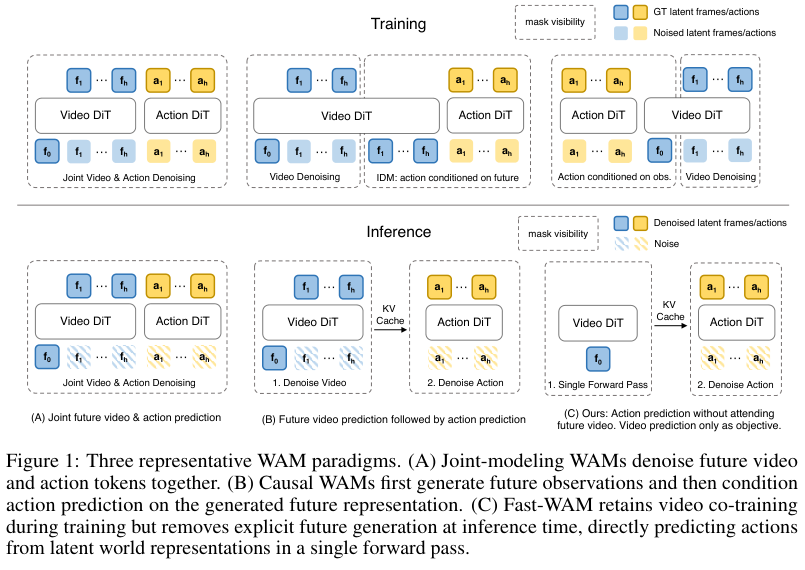
图源:Fast-WAM: Do World Action Models Need Test-time Future Imagination?,Figure 1,本站从论文 PDF 截取。原图对比三种 WAM 范式:联合去噪未来视频与动作、先生成未来视频再预测动作、以及 Fast-WAM 在推理时跳过未来视频分支。本站读法:这张图把“世界建模监督”和“测试时显式想象”拆开了。
Fast-WAM 原论文的问题非常尖锐:WAM 的收益到底来自测试时显式生成未来,还是来自训练时视频建模带来的表示塑形?论文的结论倾向后者。它保留训练阶段的视频 co-training,但推理时跳过未来预测,直接做动作生成;论文报告 190 ms 推理延迟,比 imagine-then-execute WAM 快 4 倍以上,同时去掉视频 co-training 会带来更大的性能下降。
这对理解 WAM 很关键。很多时候,未来视频更像训练时的教师,而不一定是部署时的输出。视频预测迫使模型学习物体、手、工具和场景的时序变化;但到了控制循环里,系统可能只需要 action chunk、风险估计、任务进展或 latent state。
所以“WAM 的价值可能不只在推理时想象未来”这一点,可以更明确地表达为:
1 | 训练时:视频预测提供密集动态监督,帮助动作表征对齐物理世界。 |
这也回应了青稞社区那篇 WAM 总结里的一个直觉:AC-WM 和 WAM 的区别可以从“动作是输入还是输出”来理解,但真实系统未必只选一种纯形态。未来更可能是 VLA、WAM、AC-WM、risk model 和 controller 的混合架构。
为什么 3D 视觉会进入 WAM
如果 WAM 只生成二维视频,它仍然会遇到一个工程问题:像素未来能不能被控制系统使用?
机器人真正关心的不是一段未来视频是否逼真,而是:
- 物体、夹爪和目标区域在什么三维位置;
- 相机外参、深度和尺度是否可信;
- 动作后是否会遮挡、碰撞、滑落或卡住;
- 任务阶段是否推进;
- 真实观测刷新后,模型能否纠偏。
这些问题都指向 3D。二维视频可以隐含几何,但隐含不等于可检查;对 planner 和 checker 来说,深度、位姿、点云、点流和可见性比纹理更直接。
DepthVLA、PointVLA、Spatial Forcing、BridgeVLA 可以理解成“显式注入三维信息”的路线:把深度、点云、空间 token 或几何约束接入 VLA / WAM。它的优点是容易和现有架构结合,缺点是三维信号可能只是辅助特征。要证明它真的进入了世界模型层,仍然要看反事实动作、闭环成功率和失败回放。
PointWorld:把状态和动作都放进 3D 点流
PointWorld 最能代表“3D world model”的路线野心。原论文把状态和动作统一到共享三维空间:输入 RGB-D、机器人 URDF 和关节动作后,先把机器人动作转换成 3D robot point flows,再和场景点云拼接,最后预测全场景未来点流。
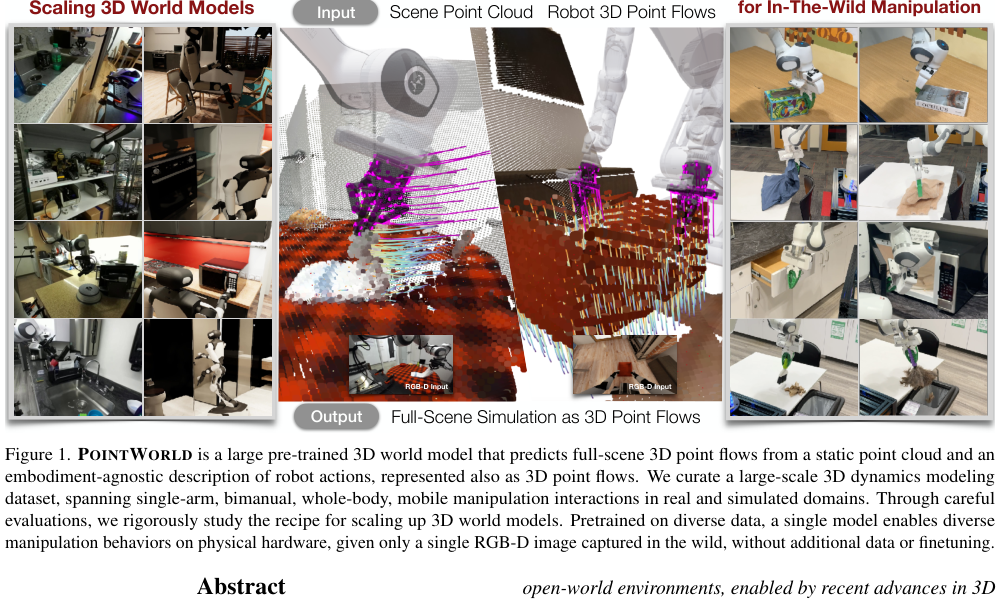
图源:PointWorld: Scaling 3D World Models for In-The-Wild Robotic Manipulation,Figure 1,本站从论文 PDF 截取。原图展示 PointWorld 用静态点云和机器人 3D 点流预测全场景 3D 点流。本站读法:这不是“给 VLA 加深度图”,而是把动作本身也改写成三维空间里的运动。
 { .atlas-figure-compact }
{ .atlas-figure-compact }
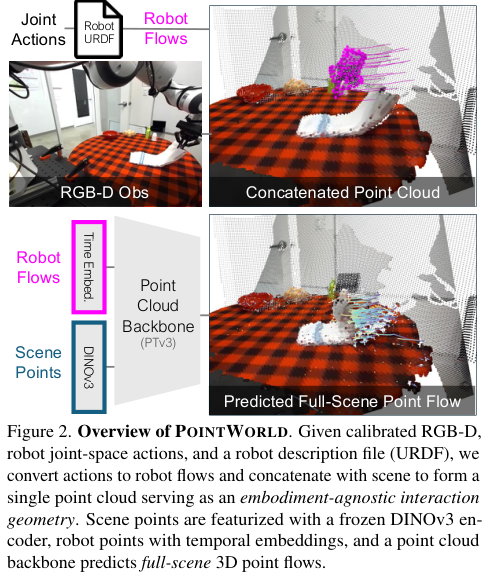
图源:PointWorld 论文 Figure 2,本站从论文 PDF 截取。原图表达:RGB-D 观测、URDF、关节动作先被转换成 scene points 与 robot flows 的混合点云,再由 DINOv3 与 Point Transformer V3 处理并预测 full-scene point flow。本站读法:动作接口从“某个机器人专属关节空间”转向“末端和机器人表面在 3D 中怎样运动”。
原论文的几个数字值得关注:
| 维度 | PointWorld 论文证据 |
|---|---|
| 数据规模 | 约 2M trajectories / 500 hours,覆盖真实与仿真、Franka 与双臂人形机器人 |
| 训练配置 | PointWorld-1B 使用 128 张 H100 训练 20 天 |
| 推理速度 | 约 0.1s,可接入 MPC |
| 输出形式 | full-scene 3D point flow,而不是只预测单个物体或末端轨迹 |
这条路线对 WAM 的启发很大:如果动作最终发生在三维空间里,就不要总把动作困在某个 embodiment 的关节角里。用 3D 点流表示动作,可以更自然地表达接触、遮挡、物体形变、重力和跨机器人迁移。
但它也把数据 pipeline 的难度暴露出来了。PointWorld 的附录提到使用 FoundationStereo、VGGT、CoTracker3 等组件改善 DROID 的深度、外参和点跟踪质量。也就是说,3D 世界模型不是只靠模型结构“长出几何”,而是严重依赖深度、相机姿态、机器人 mask、点追踪和质量过滤。
这也引出一个工程判断:Data Pipeline 仍为重中之重。
D4RT:4D 重建提示我们重新理解“世界状态”
PointWorld 讨论的是机器人动作条件下的 3D 点流;D4RT 则从视频 4D 重建角度给了另一个启发:动态世界不应该被拆成一堆互相打补丁的任务。
 { .atlas-figure-compact }
{ .atlas-figure-compact }
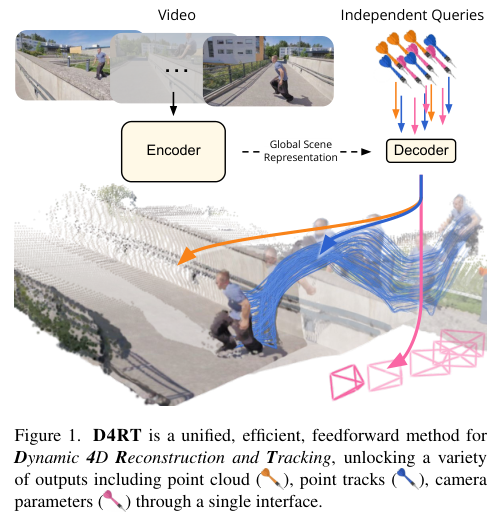
图源:Efficiently Reconstructing Dynamic Scenes One D4RT at a Time,Figure 1,本站从论文 PDF 截取。原图展示 D4RT 用统一接口输出点云、点轨迹和相机参数。本站读法:D4RT 的意义不只是 4D 重建效果,而是把深度、点轨迹、相机和动态场景放进同一套查询接口。
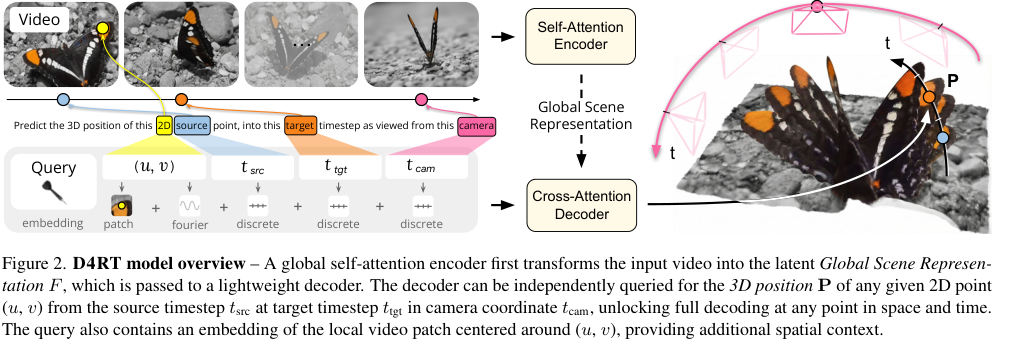
图源:D4RT 论文 Figure 2,本站从论文 PDF 截取。原图展示 D4RT 的全局场景表示和查询式 decoder:给定源点、源时刻、目标时刻和相机参考帧,模型预测目标 3D 位置。本站读法:这类 query interface 很适合作为世界模型状态层的设计参考。
D4RT 项目页和 DeepMind 博客都强调同一点:它不是为 depth、tracking、camera pose 分别做一个模块,而是用统一 encoder-decoder Transformer 和查询机制,在一个 global scene representation 上按需解码。DeepMind 博客还强调,传统动态场景 3D 理解往往慢且碎片化,而 D4RT 的查询式设计能让 4D 重建更接近实时应用。
雷峰网的中文解读有一句判断值得吸收:D4RT 重要的不是“更多模块”,而是用一个干净接口把原本分裂的任务收拢到同一套表示里。这个观点放到 WAM 里也成立。真正有用的世界模型,不应该是视频模型、深度模型、跟踪模型、位姿模型和动作模型的松散拼接;它至少要有一个能被不同消费方查询的状态表示。
中文公众号文章给的三个提醒
相关中文解读里,有三类观点值得吸收,但它们都应该作为“理解线索”,不能替代论文证据。
第一,WAM 的核心争议是动作接口。
青稞社区的 WAM 总结把 AC-WM 和 WAM 的差别讲得很直观:AC-WM 里动作是输入,WAM 里动作和未来状态一起输出。这是很好的入门视角。但工程上不能停在二分法,因为 Fast-WAM 已经说明,训练时的世界建模和推理时的未来生成可以拆开。
第二,DreamZero 的成功不该被解释成单因素胜利。
机器之心转载的分析文章问得很对:DreamZero 是范式突破,还是数据、模型主干、时间上下文和视频辅助监督一起造成的结果?更稳妥的解释倾向后者。WAM 的范式很重要,但没有多样数据、14B 视频 backbone、闭环缓存、系统优化和真实评测,它很难单独成立。
第三,产业文章里的“先思后行”叙事要保留,但要降温。
36氪等文章把 WAM 写成从“盲动”到“规划推理”的转变,这个方向感是对的:机器人需要执行前评估动作后果。但学术写作里还要补一句:模型想象可能错,错误未来会诱导错误动作,所以必须有真实观测刷新、安全过滤和失败回放。
DreamZero 论文自己的失败图就说明了这点。
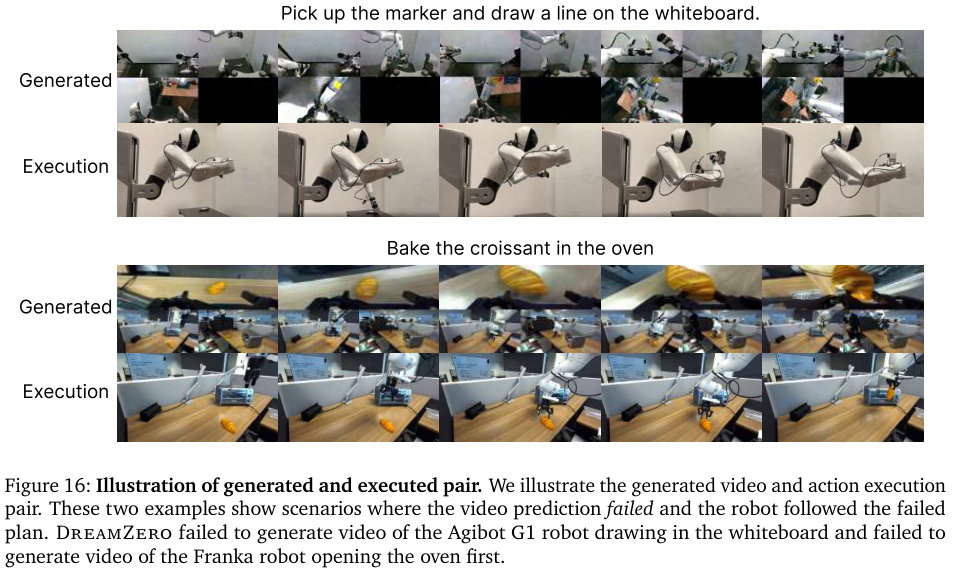
图源:DreamZero 论文 Figure 16,本站从论文 PDF 截取。原图展示 generated video 与 executed action 的失败配对。本站读法:WAM 更强也更危险,因为错误未来和错误动作可能互相支持;闭环系统必须能在真实观测刷新后纠偏。
综合判断
把原论文和中文解读合起来看,可以收束成三句话。
第一,WAM 的核心不是生成未来,而是让动作对未来负责。
DreamZero 证明视频动作联合建模可以做真实机器人闭环策略;Fast-WAM 则提醒我们,显式未来生成未必是部署时必要条件。两篇放在一起看,结论更稳:WAM 的关键收益来自 world modeling 对动作表征的约束,而不是每次推理都必须完整想象未来。
第二,3D 视觉进入 WM,不是为了“多模态”,而是为了可验证。
PointWorld 把状态和动作统一成 3D point flows;D4RT 用统一查询接口重建动态 4D 世界。它们都在回答同一个问题:世界模型输出的未来,能不能被 planner、controller、checker、人审和 replay 系统消费?
第三,Data Pipeline 是 3DV with Scaling 的前提。
二维视频模型 scaling 有 web video 支撑;3D 世界模型 scaling 需要深度、外参、尺度、点轨迹、机器人 mask、仿真与真实对齐。没有这些,3D 只会成为 noisy auxiliary signal;有了这些,WAM 才可能从“视频想象”走向“物理闭环”。
一个更可落地的系统图
flowchart LR
A["RGB-D / 多视角视频 / 本体状态"] --> B["3D 数据管线
depth / pose / point tracks / masks"]
B --> C["状态表示
point flow / 4D scene / latent"]
C --> D["WAM / AC-WM 联合训练"]
D --> E["动作 chunk / 风险 / 任务进展"]
E --> F["planner / controller / safety checker"]
F --> G["真实执行"]
G --> H["观测刷新 / 失败回放"]
H --> B
H --> D
这张图比“一个大模型控制机器人”更朴素,但更接近工程现实。WAM 提供动态先验,3D 视觉提供物理状态,VLA 提供语义接口,planner/controller 提供可执行性,data pipeline 提供持续改善。
最后判断
WAM 的真正价值,不是让机器人拥有一段更高清的想象,而是让动作必须对未来负责。3D 视觉的真正价值,也不是给模型多一个输入通道,而是把未来变成可验证、可规划、可回放的空间事实。
核心判断可以压成一句话:
3DV with Scaling will benefit WM,但前提是 3D 数据、动作接口和闭环评测一起 scaling。
外部精读
- 原论文:World Action Models are Zero-shot Policies / DreamZero。
- 原论文:Fast-WAM: Do World Action Models Need Test-time Future Imagination?。
- 原论文:PointWorld: Scaling 3D World Models for In-The-Wild Robotic Manipulation。
- 原论文:Efficiently Reconstructing Dynamic Scenes One D4RT at a Time。
- 项目页:DreamZero project。
- 项目页:Fast-WAM project。
- 项目页:PointWorld project。
- 项目页:D4RT project。
- 中文解读:具身智能观察室:DreamZero 世界模型实现零样本泛化与跨具身迁移。
- 中文解读:机器之心:训练机器人方式对了吗?英伟达 DreamZero 双榜第一新反思。
- 中文解读:青稞社区:关于 World Action Model 的思考和总结。
- 中文解读:36氪:世界模型驱动,具身智能告别“盲动”时代。
- 中文解读:雷峰网:D4RT 统一、高效的动态 4D 场景重建。
相关阅读与下一步
- 站内下一步:WM / WAM / VAM:动作到底怎样进入世界模型。
- 站内下一步:DreamZero:世界动作模型为什么可以做零样本策略。
- 站内下一步:VLA、WAM 与世界模型系统图。
- 站内下一步:相机、深度与机器人视觉。
- 站内下一步:VGGT:前向恢复相机、深度、点云与轨迹。
- Title: 思考探索:WAM 与 3D 视觉:世界模型从视频想象走向物理闭环
- Author: Charles
- Created at : 2026-06-07 09:00:00
- Updated at : 2026-06-07 09:00:00
- Link: https://charles2530.github.io/2026/06/07/ai-files-thinking-exploration-wam-3dv-world-models/
- License: This work is licensed under CC BY-NC-SA 4.0.