
思考探索:世界模型驱动的机器人数据飞轮:能持续生产经验的系统,才是真正的基础设施
本文关注的问题。 如果 World Model 是机器人获得“内部模拟器”的关键能力,那么它到底需要什么样的数据飞轮,才能学好、用上,并在真实部署中持续变强?
和一些以底层零部件、运控、整机可靠性为优势的机器人本体团队聊天,经常会听到一个很自然的判断:现在模型还不够好、也不够统一,所以智能化可以先放一放;公司先做沿途下蛋的商业化,等一个更好的模型架构出现,再系统布局上半身智能。
这个判断并不孤立。围绕 2025 世界机器人大会的多篇产业报道提到,王兴兴认为行业对基础数据的关注偏高,真正瓶颈在模型架构,尤其是当前 VLA 还不够好、不够统一。21 财经和36 氪的报道都可作为交叉核验。这是值得认真对待的产业视角,因为下半身公司每天面对的是电机、关节、减速器、热管理、量产一致性、控制稳定性和成本曲线。
但如果从 World Model 的能力边界出发,问题会换一种问法:不是“模型和数据谁更重要”,而是“一个能预测动作后果、支撑仿真、评估策略的内部模拟器,到底靠什么经验变得可信”。我的判断是:模型架构决定能学什么,数据飞轮决定系统有没有机会学到。
模型架构决定上限的形状,
数据 infra 决定有没有机会接近那个上限。因此这篇文章不从“多收数据”开始,而从 World Model 的系统角色开始:它服务 policy,服务 simulator,也服务 evaluator。每一种角色都有自己的能力瓶颈,每一个瓶颈都会把问题推回到具体的数据系统。
换句话说,等一个丝滑通用的开源模型当然有意义,但如果没有数据 infra 和部署回流 infra,模型来了也只能吃一次性数据集;真正能形成壁垒的,是把真实世界经验持续变成训练资产、验证资产和回流资产的系统。
本文的证据链分成四层。产业报道只说明“模型架构优先”这类观点真实存在;综述图用来界定 World Model 在机器人系统中的角色;论文图用来拆四条数据飞轮;部署论文用来约束边界,避免把模型能力误读成系统可靠性。
| 本文判断 | 主要证据 | 证据边界 |
|---|---|---|
| World Model 不是单个模型,而是机器人系统里的角色 | World Model for Robot Learning survey、Embodied AI world model survey | 综述给的是分类框架,不等于任何单一架构已经统一胜出 |
| 三种系统角色对应三类能力瓶颈 | policy / simulator / evaluator 相关综述图、VLA / WAM 范式图 | 不同任务里三种角色的重要性不同,不能一刀切 |
| 四类数据需求可以组织成四条数据飞轮 | DA3、VGGT-Ω、DreamZero、V-JEPA 2、kai0、Towards Video World Models | 这些论文覆盖的是关键切面,不是完整工程系统 |
| 真正的 robotics 基础设施是持续生产经验的系统 | LeRobotDataset、Open X、π0.5、kai0 的数据和部署证据 | 当前强证据常绑定特定任务族、本体和训练资源,外推要谨慎 |
上一篇 WAM 与 3D 视觉 讨论的是:世界模型怎样从视频想象走向物理闭环。这一篇继续往下问:闭环靠什么持续变好?
World Model 不是模型名,而是系统角色
机器人里的 World Model 可以先用一句话理解:给机器人一个“内部模拟器”。它接收历史观测、动作、本体状态和任务语言,输出对未来状态、风险或候选动作后果的预测。
这里的“内部模拟器”不是为了某一个固定任务写死的模块。它更像一种可被系统复用的世界知识:policy 可以用它预演动作后果,simulator 可以用它生成训练和测试环境,evaluator 可以用它判断候选策略是否接近部署分布。也正因为它不是单任务模型,数据问题才会变得更硬:数据不能只回答“这一步动作是什么”,还要回答“这个动作之后世界会怎样、哪里会失败、失败后如何回来”。
传统 policy 更像:
1 | observation + language -> action |
World Model 关心的是:
1 | history observation + action + goal -> future state / risk / score |
这个差异很关键。一个策略可以在训练分布内模仿“看到什么就做什么”,但一旦进入偏离成功轨迹的状态,它需要知道动作之后世界会怎样变化。杯子会不会滑,衣物会不会卷,遮挡会不会让目标消失,动作 chunk 接缝会不会抖,这些都不是静态图像分类问题。
所以 World Model 的价值不在于生成一段看起来很像真的视频,而在于它能不能被控制系统消费。能被消费,意味着它的预测要接动作、接几何、接风险分数、接真实观测刷新,还要能被失败回放纠正。
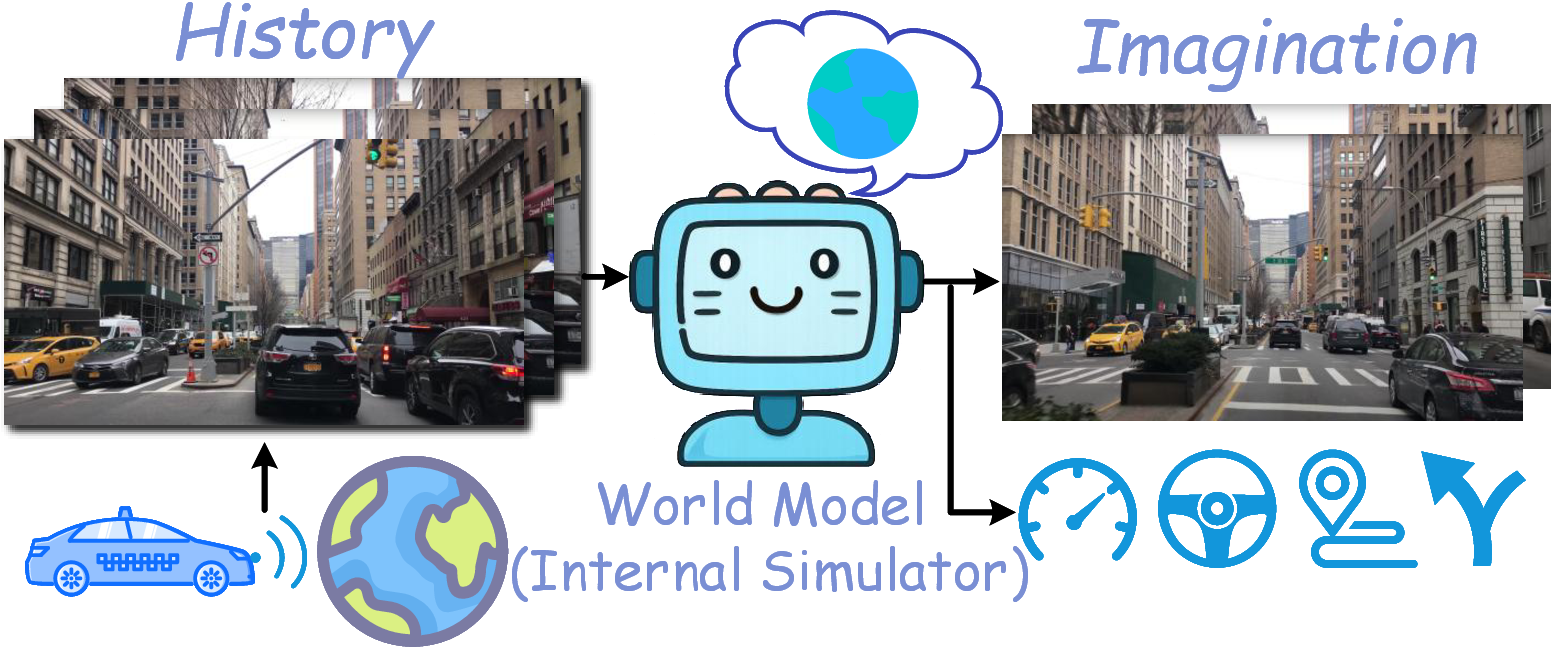
图源:A Comprehensive Survey on World Models for Embodied AI,Figure 1 子图,本站从论文 PDF 截取。原图把 world model 画成 internal simulator:从历史观测构造内部世界状态,再服务 imagination、planning 和控制。本文读法:数据 infra 要生产的不是孤立图片,而是能更新 internal state 的时序经验。
从机器人系统看,World Model 至少有三种角色。
| 角色 | 它在系统里做什么 | 对数据的关键需求 |
|---|---|---|
| Policy 支撑 | 预测动作后果,让 policy 或 planner 有因果依据 | 动作和未来状态的配对、失败和恢复轨迹 |
| Simulator | 替代或校正物理仿真,生成训练和测试环境 | 几何精度、接触动力学、真实噪声和异常初态 |
| Evaluator | 对候选策略或 checkpoint 打分 | 贴近部署分布的 near-miss、失败、人工接管和 OOD validation |
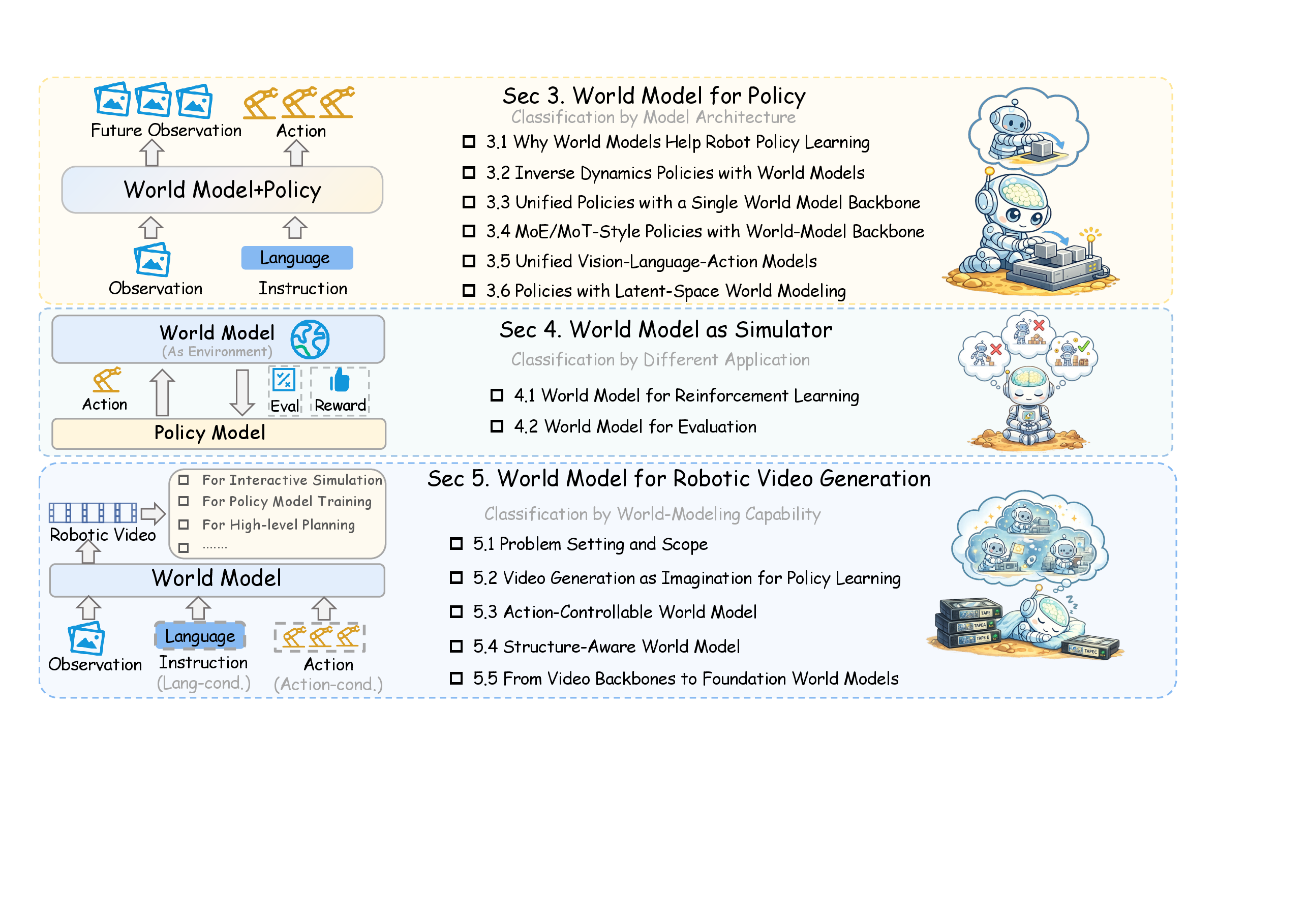
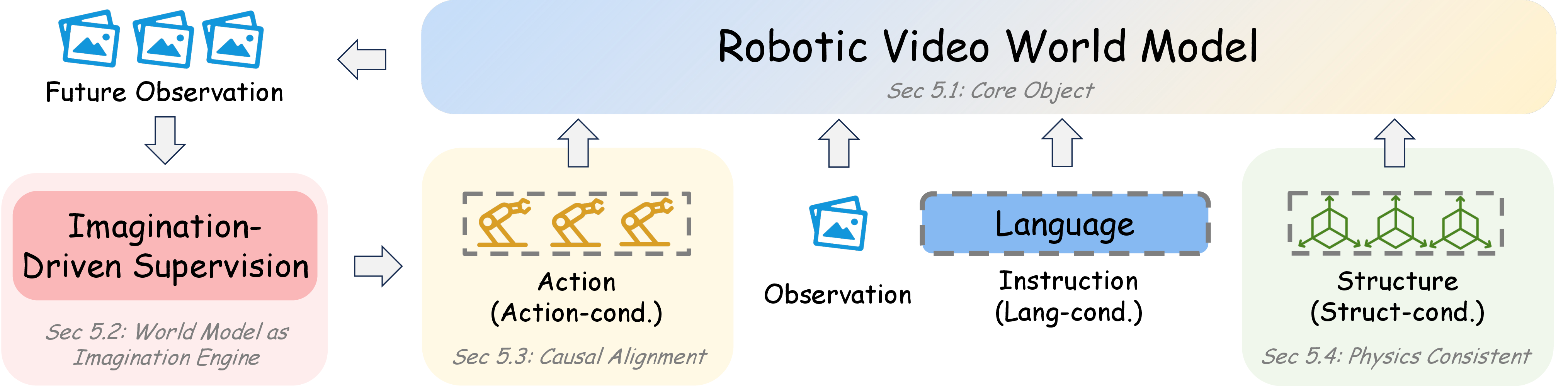
图源:World Model for Robot Learning: A Comprehensive Survey,Figure 1,本站从论文 PDF 截取。原图把机器人世界模型分成三类角色:接入 policy、作为 simulator、作为 robotic video world model。本文读法:数据 infra 不是单独服务某一个模型,而是要同时支撑动作生成、模拟评估、视频动态和数据生成。
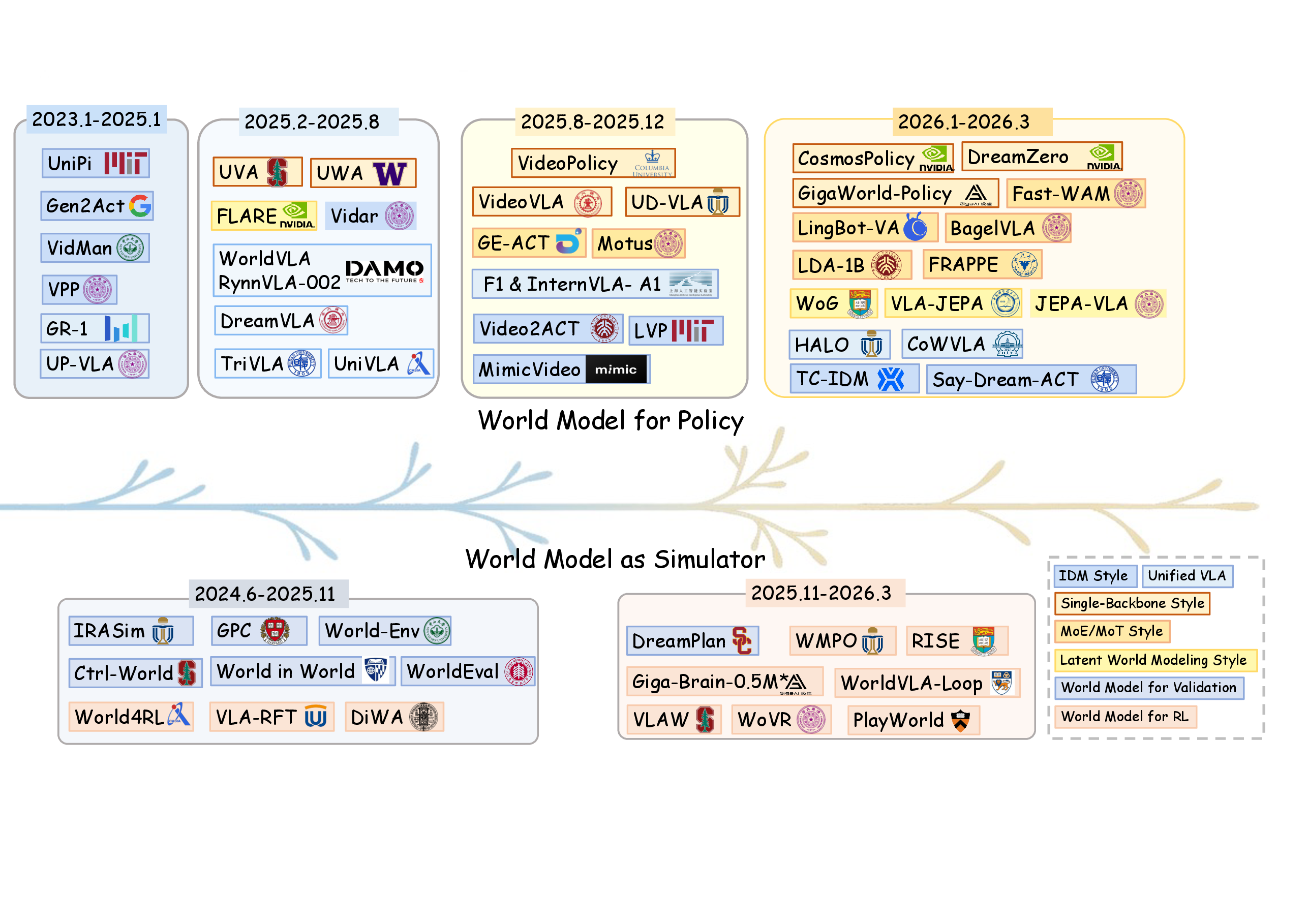
图源:World Model for Robot Learning survey,Figure 2,本站从论文 PDF 截取。原图展示 world model for policy 与 world model as simulator 的代表工作演进。本文读法:趋势不是“等一个统一模型突然出现”,而是 policy、simulator、post-training、evaluation 和 data generation 越来越缠在同一个闭环里。
所以本文的主线不是“数据比模型重要”,而是:
1 | World Model 的能力边界 |
如果把这层判断压缩成一句话,就是:能持续生产经验的系统,才是真正的基础设施。
三个能力瓶颈,把问题推回数据系统
瓶颈一:Policy 学了“状态到动作”,但没有被要求解释后果
当前主流 VLA 的学习范式,本质上是在给定图像、本体状态和任务语言后预测动作 chunk。这个范式有效,但天然有一个缺口:policy 在训练时只知道“做什么动作”,不知道动作之后世界变成什么。
在训练分布内,这个问题被成功示教掩盖了。因为示教里的动作本来就通向成功。但一旦进入 OOD 状态,比如物体位置偏一点、抓取角度偏一点、衣物折叠阶段错一点,policy 很容易做出“局部合理但全局错误”的动作。
修复这个瓶颈,需要的数据不是单纯动作标签,而是动作标签加上对应的未来状态或视频,也就是动作-后果对。未来视频在这里不是展示材料,而是密集动态监督:每一帧都在告诉模型,这段动作有没有把世界推向正确方向。
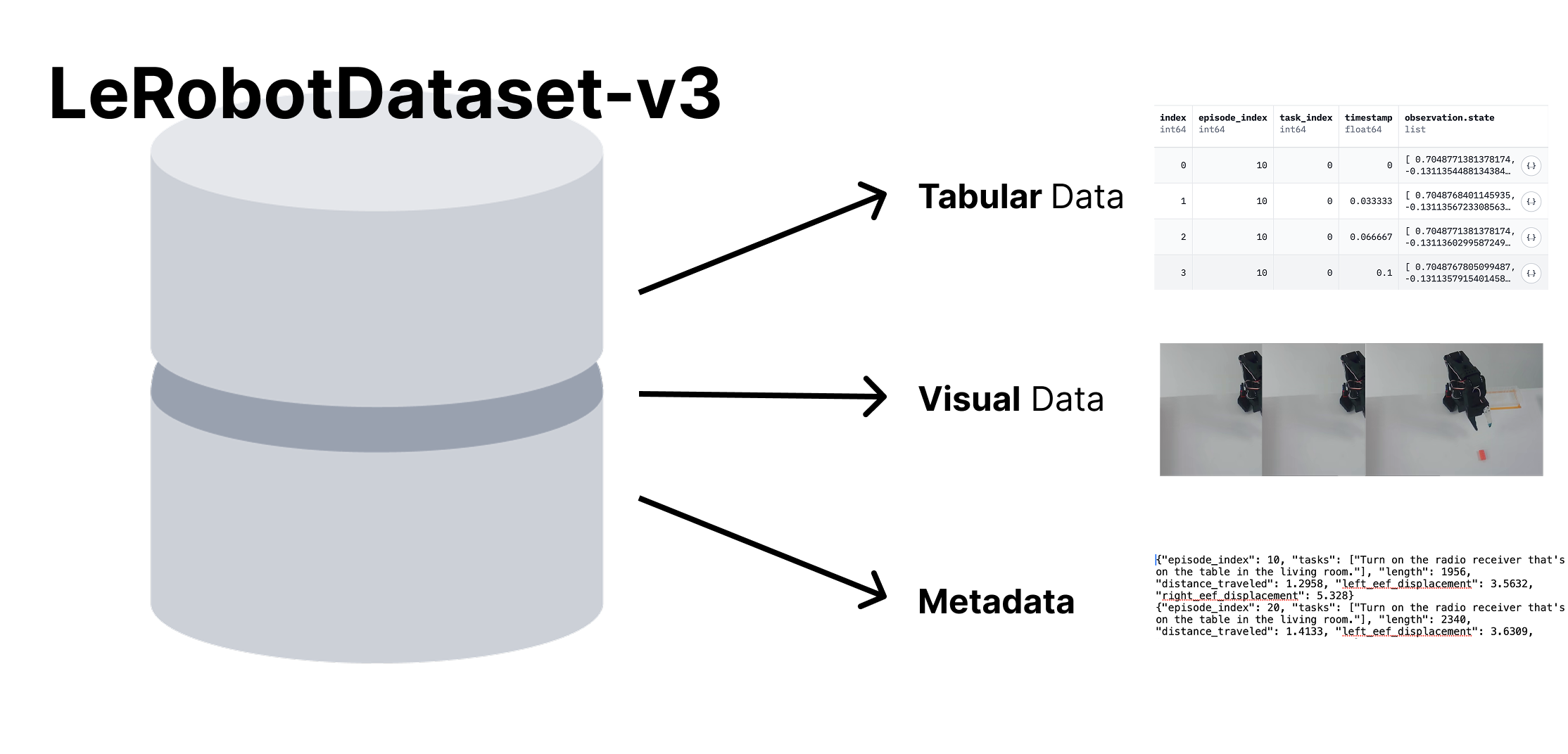
图源:Hugging Face LeRobotDataset v3.0 blog。原图把机器人数据拆成 tabular data、visual data 和 metadata。本文读法:一个 episode 不是视频文件,而是状态、动作、视频、统计量、episode 边界、schema 和元数据一起可追溯。
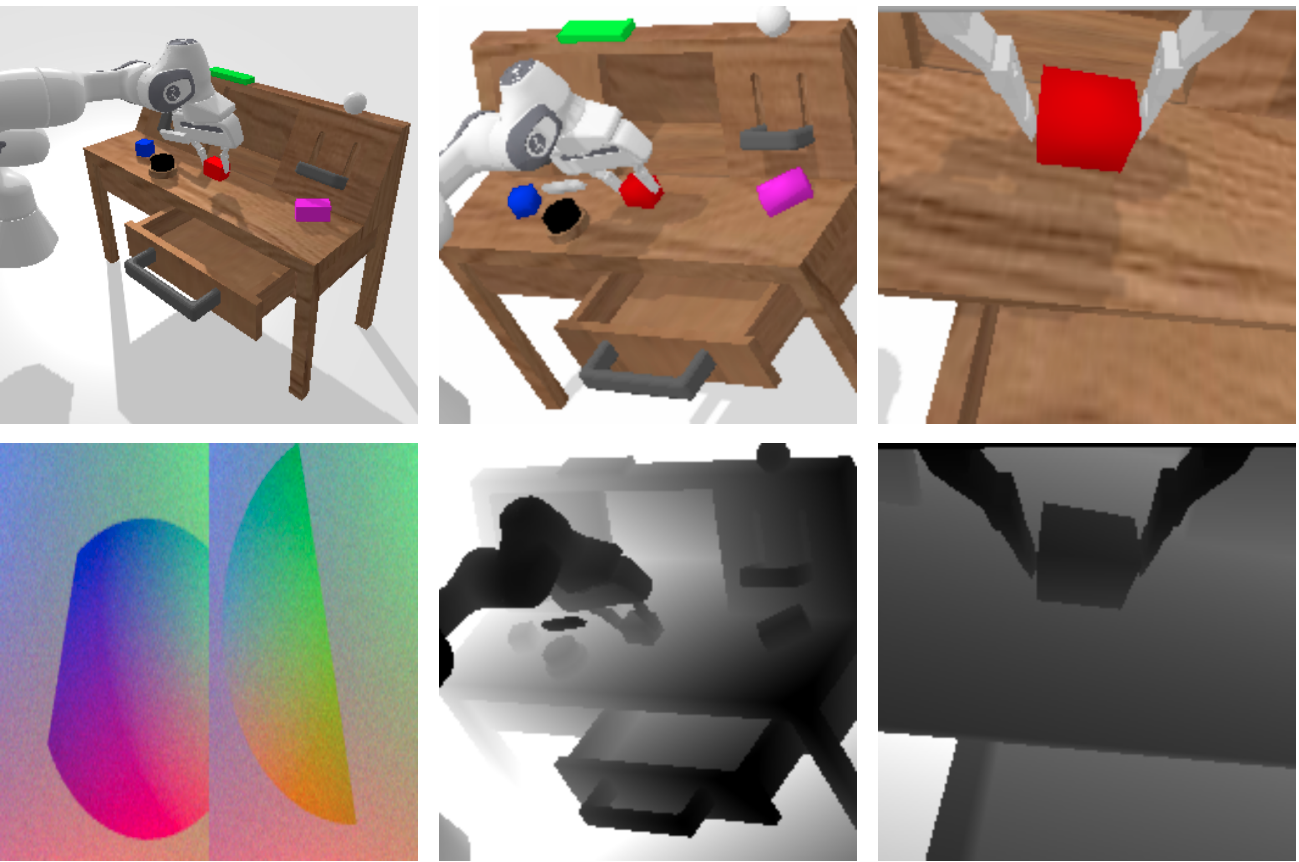
图源:CALVIN GitHub README,本站归档。原图展示多视角 RGB-D、静态相机、夹爪相机和本体状态。本文读法:World Model 要预测动作后果,必须先拿到同步的多模态时序记录。
瓶颈二:Simulator 如果只吃顺境数据,就只会生成顺境幻觉
World Model 作为 simulator 的价值很直观:降低真机采集成本,让机器人在虚拟环境里反复练习。但 simulator 是在真实数据上训练出来的。它能生成什么,本质上取决于训练分布里有什么。
如果训练数据只有顺利完成任务的轨迹,simulator 就会天然偏向顺境。那些真实部署里常见的边缘状态,比如接触时物体滑动、遮挡导致视野消失、抓取角度偏差导致失败,可能根本不会进入它的想象空间。
这会制造一个危险闭环:偏向顺境的 simulator 会系统性高估策略能力,policy 在 simulator 里表现很好,一上真机就失败。解决办法不是只扩大数据量,而是让 simulator 持续被真实接触、真实失败和异常初态校正。
这也是公开数据集和企业私有数据之间最核心的差异。Open X-Embodiment 这样的数据集解决了规模、格式和跨本体共识的问题,但它不能自动补齐每个本体、每个任务、每种失败状态的部署分布。Simulator 的经验边界,最终仍然受制于它从未见过哪些真实失败。
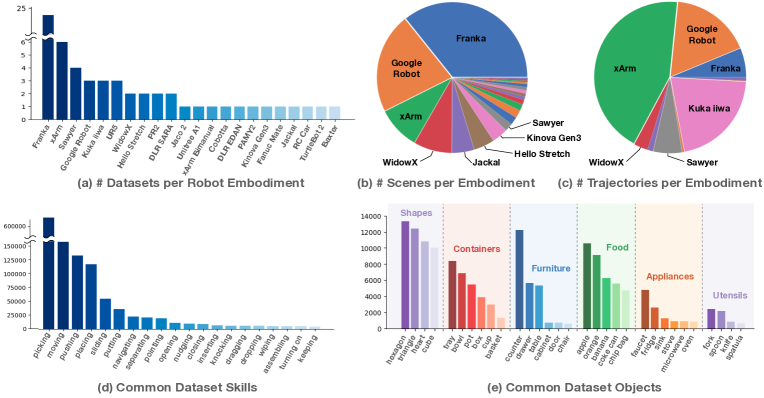
图源:Open X-Embodiment / RT-X,Figure 1,本站从论文 PDF / 项目材料归档。原图统计 robot embodiment、scene、trajectory、skill 和 object category 的分布。本文读法:公开数据集解决“少”的问题,但动作接口、相机视角、控制频率和失败样本分布仍会影响 simulator 的真实性。
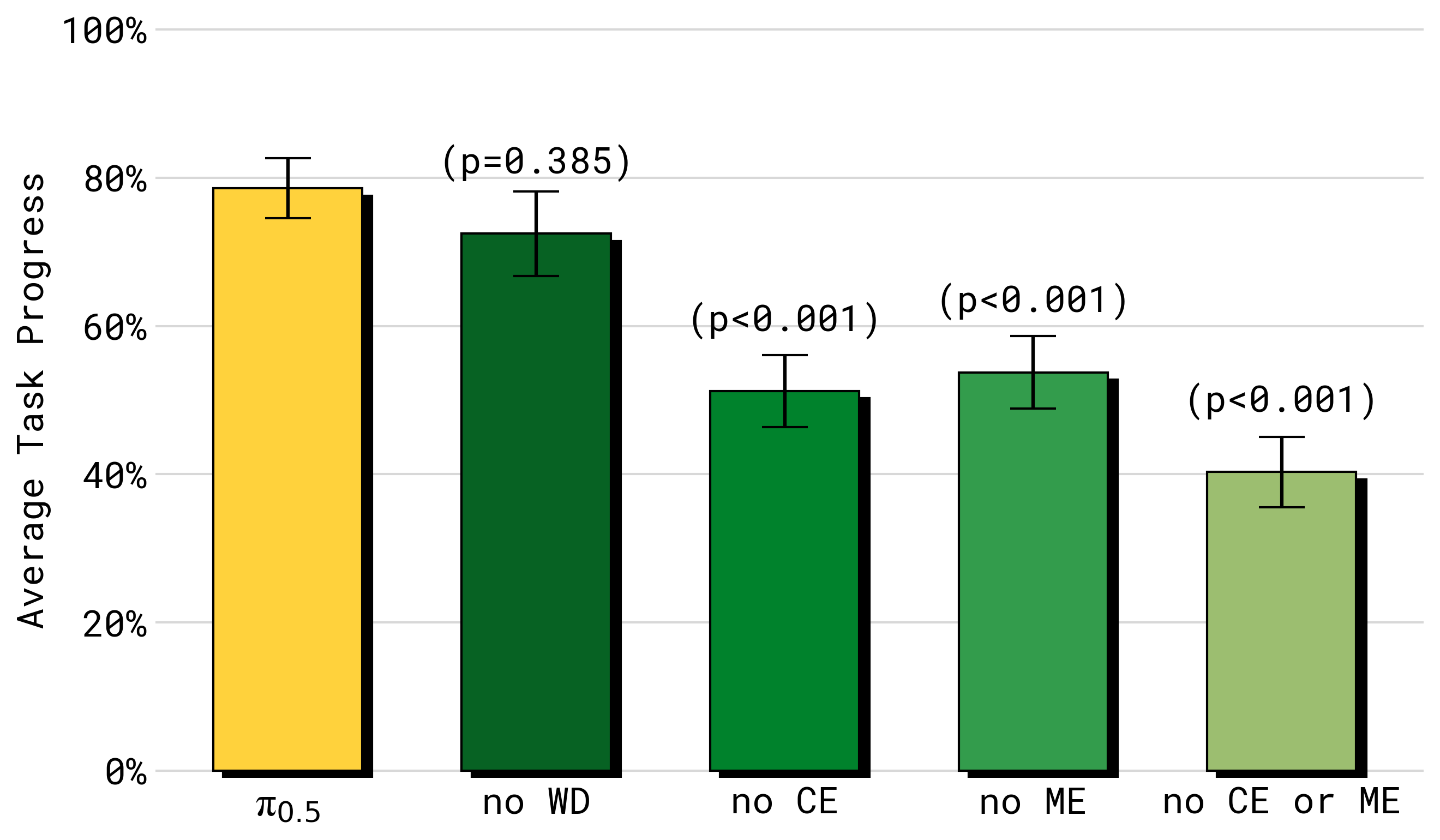
图源:π0.5,Figure 10,本站从论文 / 官方材料归档。原图比较去掉 web data、cross-embodiment data、multi-environment data 等来源后的表现变化。本文读法:数据源不是简单相加,每类数据补的能力不同;simulator 需要知道自己的训练分布缺什么。
瓶颈三:Evaluator 如果只见过顺境样本,就会选错 checkpoint
当我们训练出多个候选策略,想知道哪个更适合真机部署时,World Model 可以作为 evaluator:用预测结果、风险分数或候选未来来选择 checkpoint。这条路线很有价值,但也有一个常被忽视的陷阱。
Evaluator 的判断能力取决于它见过什么。如果它主要见过遥操作成功示教,它对“好策略”的定义就会偏向顺境表现。但真实机器人部署里最常见的,不是完整成功轨迹,而是偏离成功轨迹后的状态:抓偏、滑落、卡住、动作 chunk 接缝抖动、人工接管前的一瞬间。
所以 evaluator 需要的数据,是失败邻域:near-miss、人工接管、失败初态、恢复轨迹和重试成本。否则它选出来的 checkpoint 只是“在顺境里最像示教”,不一定最适合部署。
这一点值得单独强调:评测集不是中立工具,它会决定你把哪个 checkpoint 推到真机上。如果 validation set 来自训练顺境,系统会稳定选出“顺境冠军”;如果 validation set 来自部署失败邻域,它才有机会选出“真实部署里更稳”的策略。
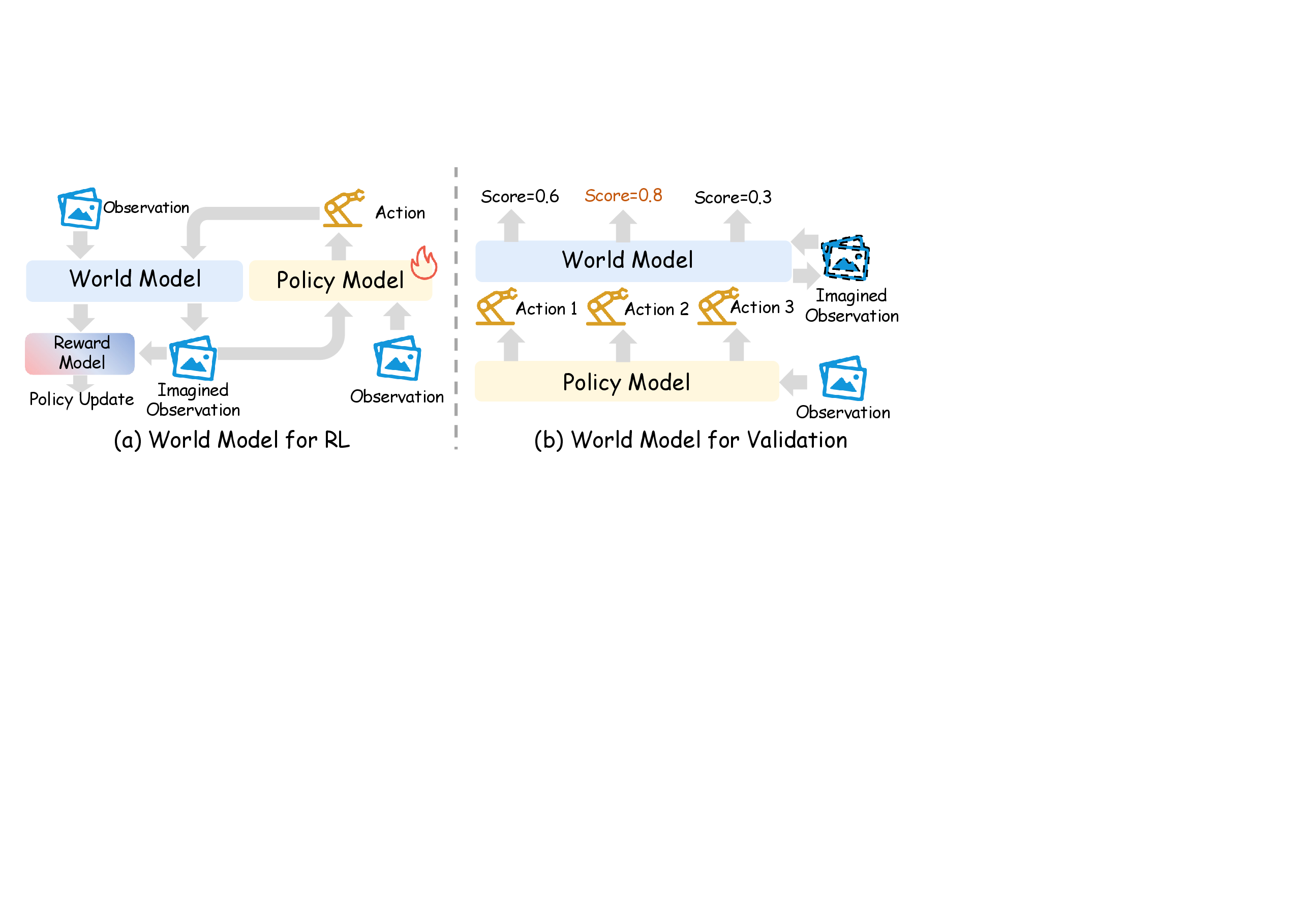
图源:World Model for Robot Learning survey,Figure 5,本站从论文 PDF 截取。原图左侧展示 learned simulator for RL,右侧展示 world model as validation / evaluator。本文读法:evaluator 不是离线打分器,而是把候选动作、policy ranking、reward / progress / risk 和真实部署失败连接起来的系统角色。
图源:χ₀: Resource-Aware Robust Manipulation via Taming Distributional Inconsistencies,Figure 1,本站从论文 PDF 截取。原图展示 、、 三类分布及对齐模块。本文读法:这是部署回流的数据飞轮图,不只是模型 pipeline。
从三类瓶颈推出四类数据需求
把上面三类瓶颈合并,就能得到四类具体数据需求。
| 数据需求 | 对应瓶颈 | 对应飞轮 |
|---|---|---|
| 稳定的空间状态 | Policy 和 simulator 都需要知道物体在哪里、空间结构是什么 | 几何资产飞轮 |
| 动作-后果配对 | Policy 不能只知道动作,还要知道动作导致什么未来 | 视频动作飞轮 |
| 部署失败邻域 | Simulator 和 evaluator 都需要贴近真实部署分布 | 部署回流飞轮 |
| 反事实长尾 | 真机采集无法穷举所有危险、稀有和边缘场景 | 混合生成飞轮 |
这四条飞轮不是论文分类,而是四种数据增值方式。它们在真实系统里不会分开运行:几何资产支撑仿真,动作后果支撑 planning,部署失败校正 evaluator,真实数据又校正仿真和合成。
也可以把它理解成一套机器人版“驾驶经验”:几何状态让系统先看清路;动作后果让它知道油门、方向盘和刹车会怎样改变未来;部署失败让它学会防御性驾驶;反事实长尾让它在模拟器里练暴雨、爆胎和视野遮挡。缺任何一类,系统都会有盲区。

图源:本站自绘。它把四种范式压成四条互相校正的数据回路:几何资产回路提供空间状态,视频动作回路约束动作后果,部署回流回路把真实失败放回训练和验证,混合生成回路生产长尾并接受真实数据校正。
范式一:几何资产飞轮,先把世界定位清楚
几何不是感知前处理,而是经验资产化的第一层。没有稳定几何,policy 会一直在像素层猜距离、遮挡和可达性;simulator 建出来的场景也会失真。
这条飞轮的关键词是“可结构化索引的几何资产”。它不是“多一个 depth head”,而是把一段机器人轨迹变成可以被质检、回放、检索、规划和仿真构建复用的空间状态:物体在哪里,夹爪在哪里,遮挡发生在哪里,失败前后几何状态怎样变化。
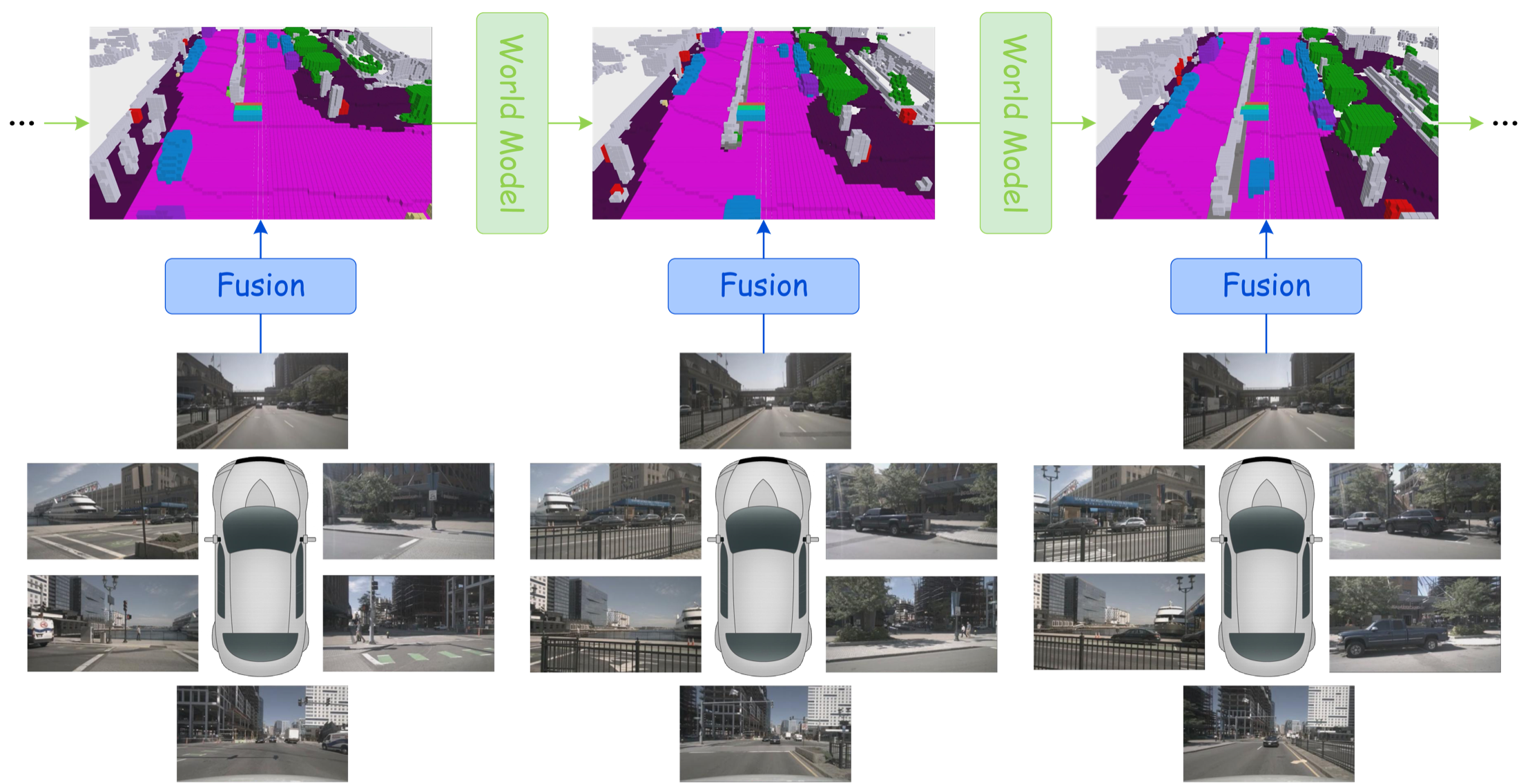
图源:A Comprehensive Survey on World Models for Embodied AI,Figure 1 子图,本站从论文 PDF 截取。原图展示 Spatial Latent Grid 用 BEV、voxel、occupancy 或 geometry-aligned latent grid 表示空间世界。本文读法:机器人数据 infra 需要把视觉日志转成可定位、可融合、可规划的空间状态。

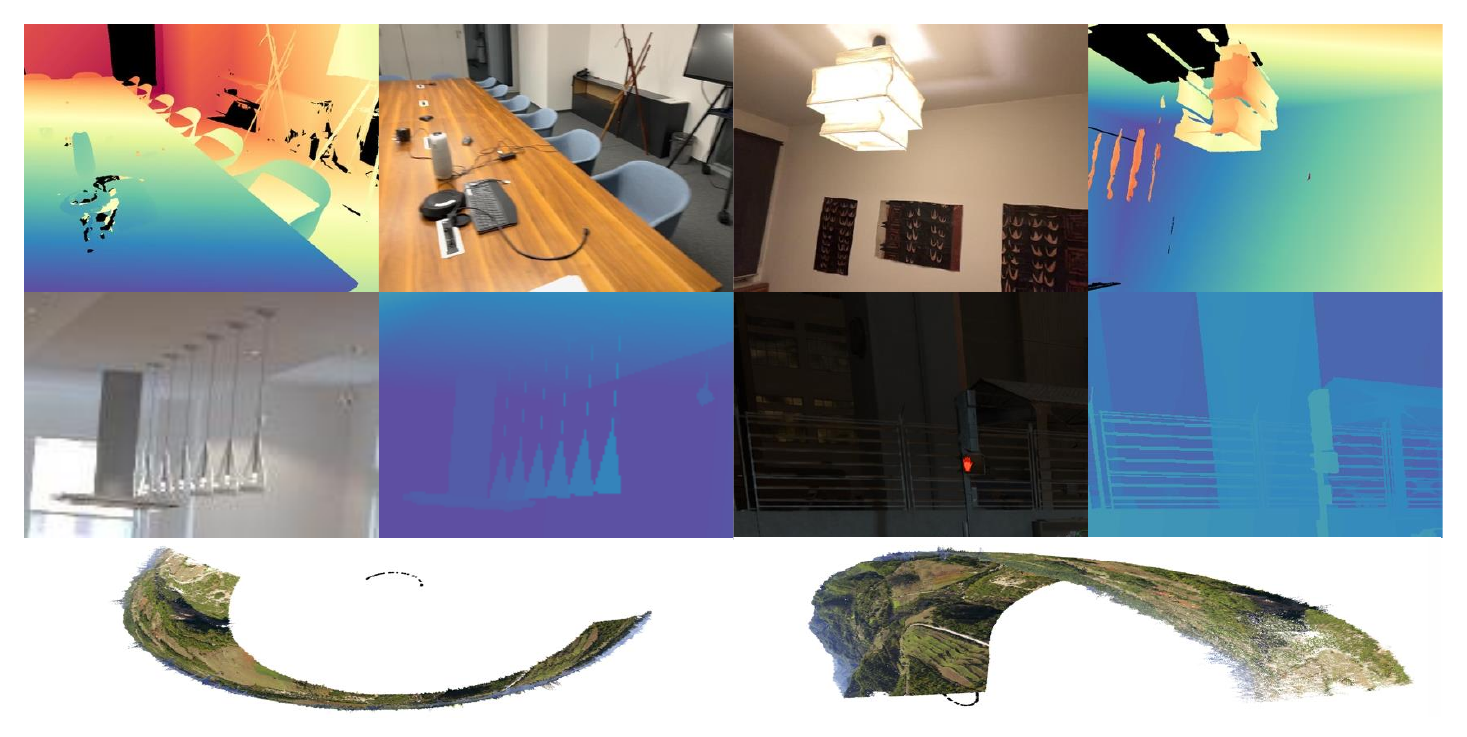
图源:Depth Anything 3,Figure 1,本站从论文 PDF 截取。原图展示 DA3 从任意数量视觉输入恢复 depth、ray、camera 和可融合 3D geometry。本文读法:它给机器人数据飞轮补的是“把普通 RGB 轨迹转成几何资产”的入口。
DA3 的关键不是“深度估计更好”这么简单,而是 depth、ray、camera 统一输出。每个像素不只有深度值,还对应相机射线。这对机器人很重要,因为真实数据经常来自多相机、腕部相机和运动视角,标定本来就不稳定。
DA3 类方法的数据飞轮可以写成:
1 | 真实 / 合成 / 多视角数据 |
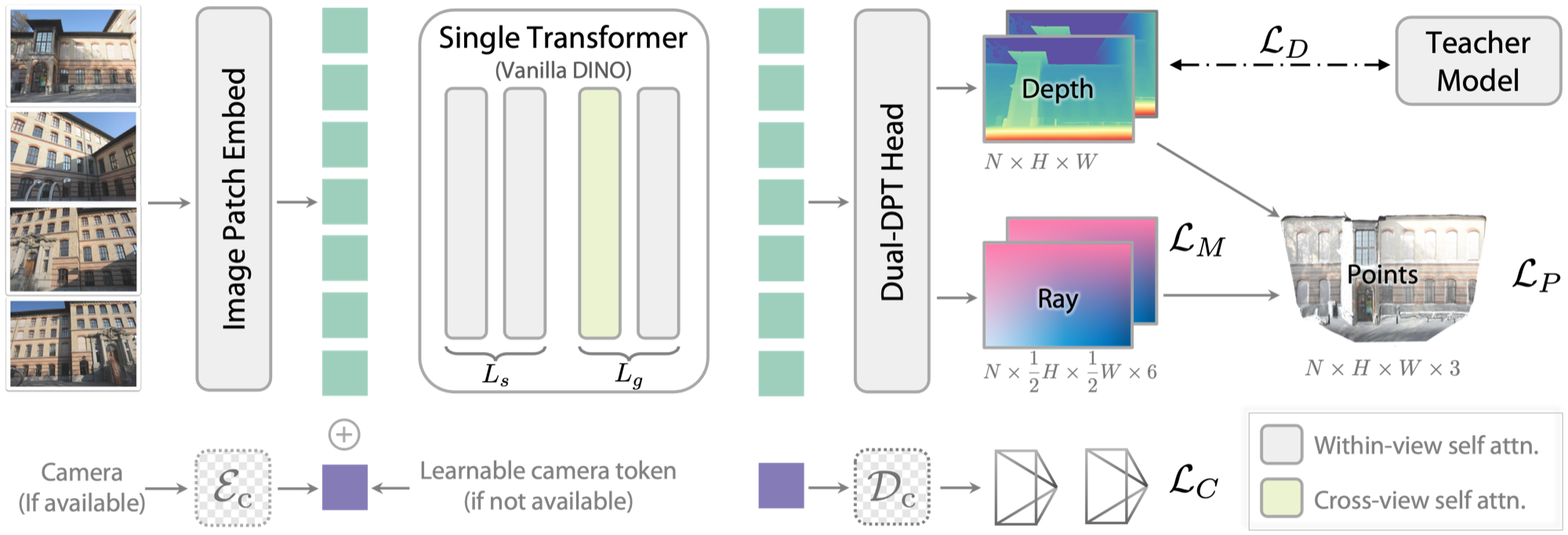
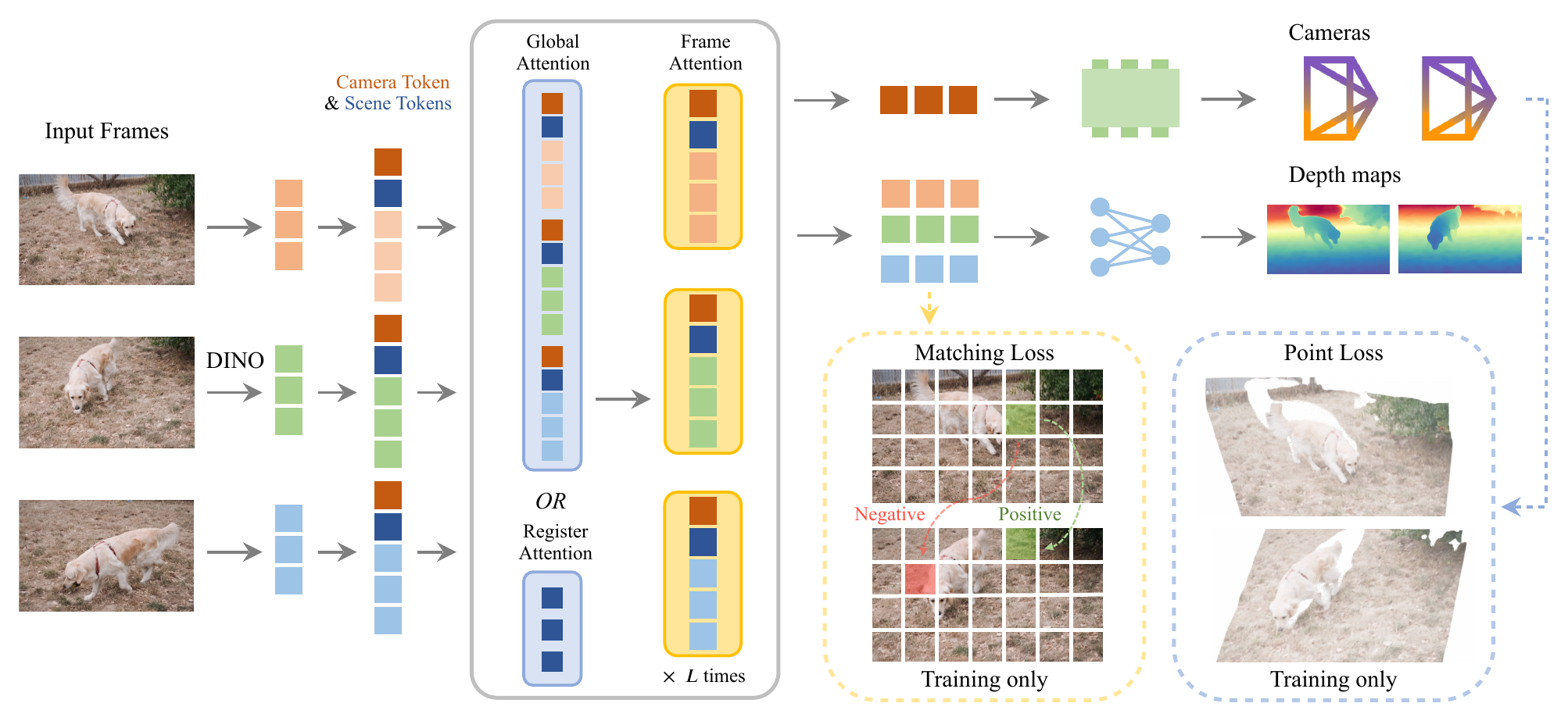
图源:Depth Anything 3,Figure 2,本站从论文 PDF 截取。原图展示单个 DINOv2 主干、跨视角 attention、camera token 和 Dual-DPT head。本文读法:几何飞轮的核心不是把 depth 当附加标签,而是把多视角视觉输入落成 depth + ray 这样的统一几何接口。
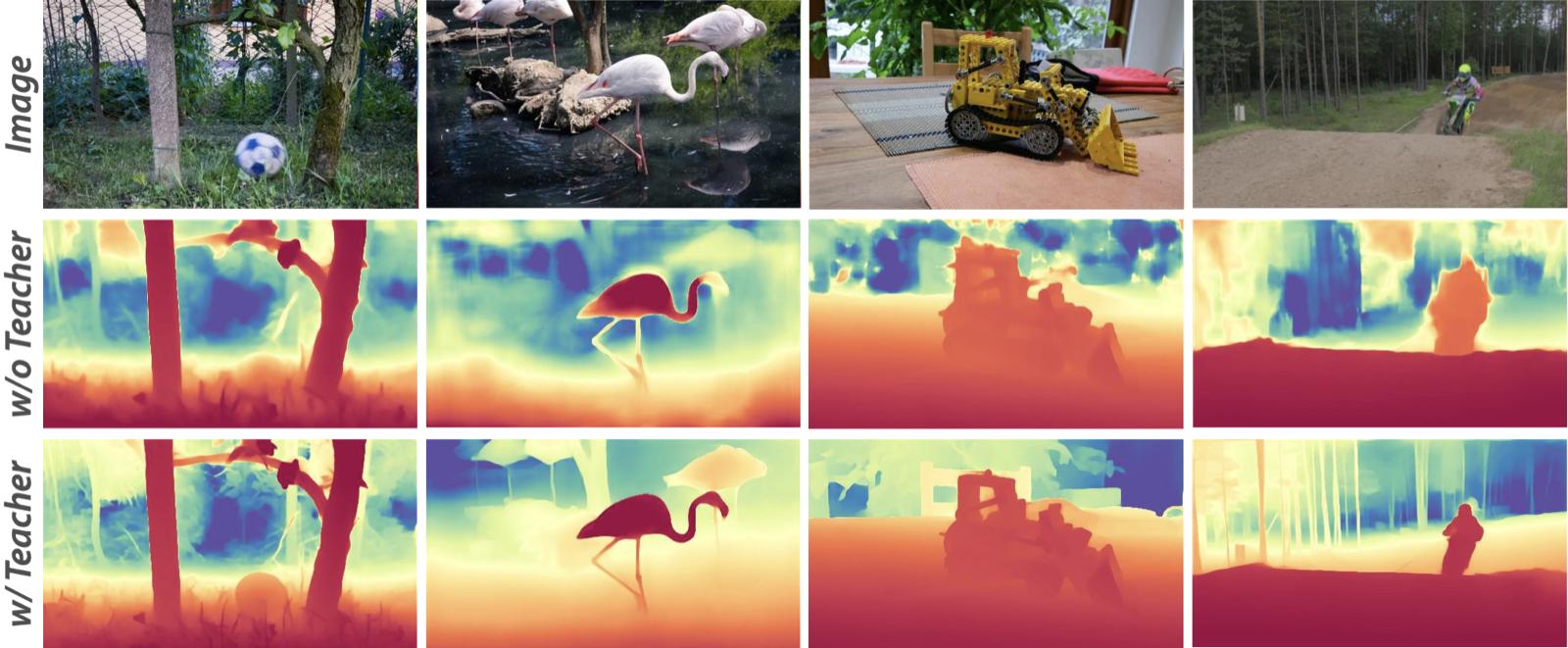
图源:Depth Anything 3,teacher supervision visualization,本站从论文 PDF 截取。原图展示真实深度的噪声和 teacher depth 的连续结构。本文读法:数据飞轮里最早的增值点不是策略训练,而是把脏几何监督清洗成能被后续模型消费的状态。
VGGT-Ω 则把几何飞轮推到更大规模。它展示了一个值得关注的现象:几何重建也能出现类似 foundation model 的 scaling 行为,模型规模和数据规模同时扩大时,3D point error 会下降。
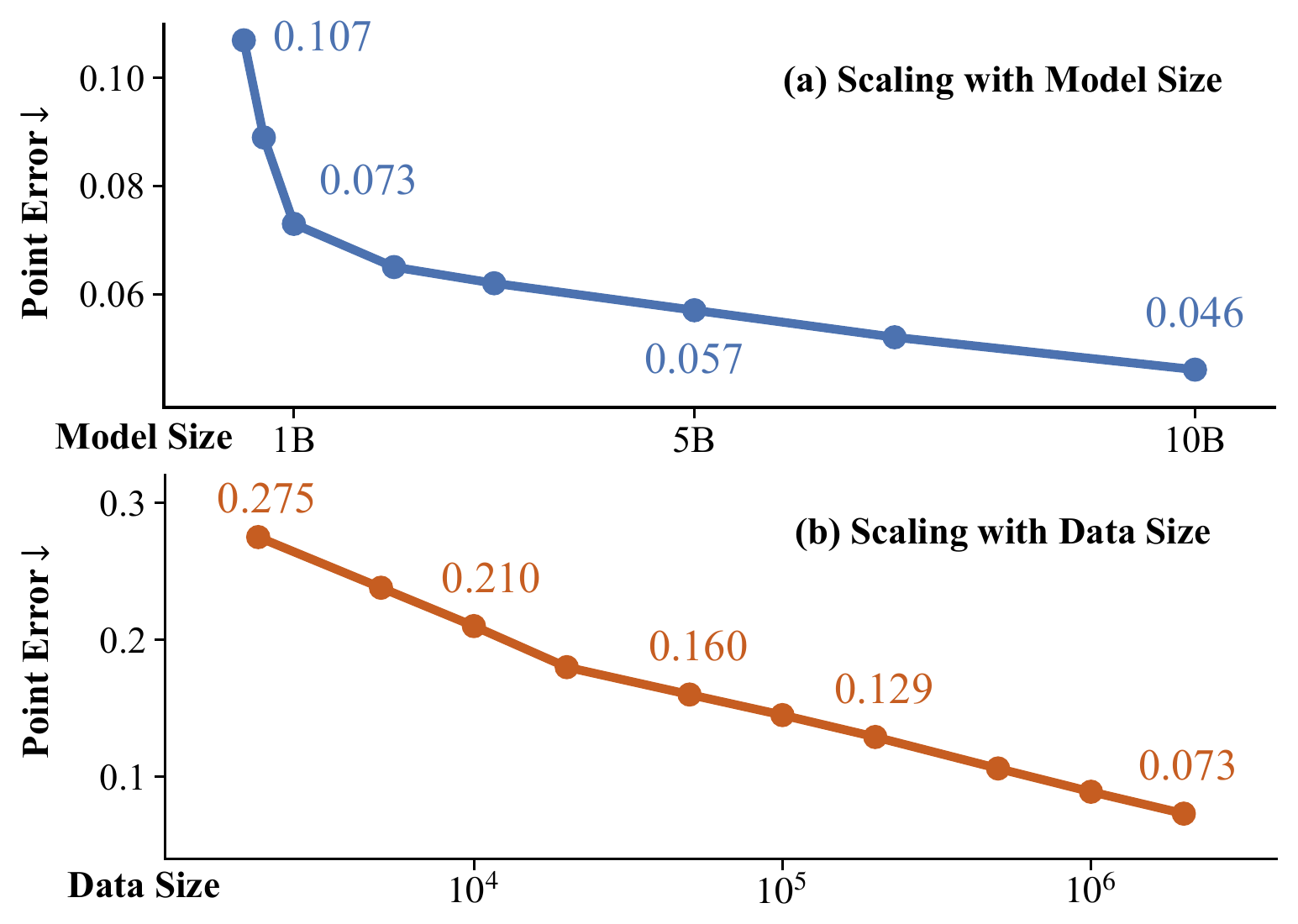
图源:VGGT-Ω,Figure 1,本站从论文 PDF 截取。原图展示模型规模和数据规模增加时 3D point error 下降。本文读法:几何重建开始像 foundation model proxy task,前提是数据标注、过滤和一致性检查能跟上。
更值得机器人方向关注的是它的数据引擎。论文不是简单抓视频训练,而是经过 VLM 预过滤、动态 mask、特征匹配、初始化、bundle adjustment、dense depth 和多视角一致性检查。透明杯、细杆、反光、人体边界,这些机器人场景里常见的东西,恰好也是最容易产生几何伪标签的地方。
图源:VGGT-Ω,Figure 2,本站从论文 PDF 截取。原图展示从多视角图像到 camera、depth、track、point map 等几何输出的统一架构。本文读法:大规模几何模型不是“抓视频就训练”,而是数据过滤、几何一致性和输出接口共同组成的飞轮。
图源:VGGT-Ω,Common Data Issues,本站从论文 PDF 截取。原图展示 sensor artifact、thin structure error 和 doming effect。本文读法:数据噪声会变成模型习惯,几何伪标签如果不清洗,最后会放大成真实执行风险。
几何飞轮的边界也要说清楚:它能让世界“被定位”,不等于让机器人“会操作”。几何模型知道杯子在哪里,不代表知道从哪个角度抓不会滑;知道桌面结构,不代表知道接触后物体如何运动。动作因果需要下一条飞轮来补。

图源:VGGT-Ω,motion-aware 示例,本站从论文 PDF 截取。本文读法:动态物体和运动场景进一步说明,几何资产飞轮必须处理时序状态,而不能只做单帧重建。
范式二:视频动作飞轮,让动作对未来负责
视频动作飞轮的核心,是从“状态到动作”转向“动作到未来状态”。传统 VLA 把动作作为输出;WAM 类方法把动作和未来视频共同建模,让模型必须解释动作会导致什么后果。
这会改变同一段示教轨迹的价值。在普通 VLA 里,它主要提供动作标签;在 WAM 里,它同时提供动作、动作后的观测序列,以及未来是否接近任务目标的密集监督。换句话说,视频动作飞轮把“示教数据”升级成了“后果数据”。
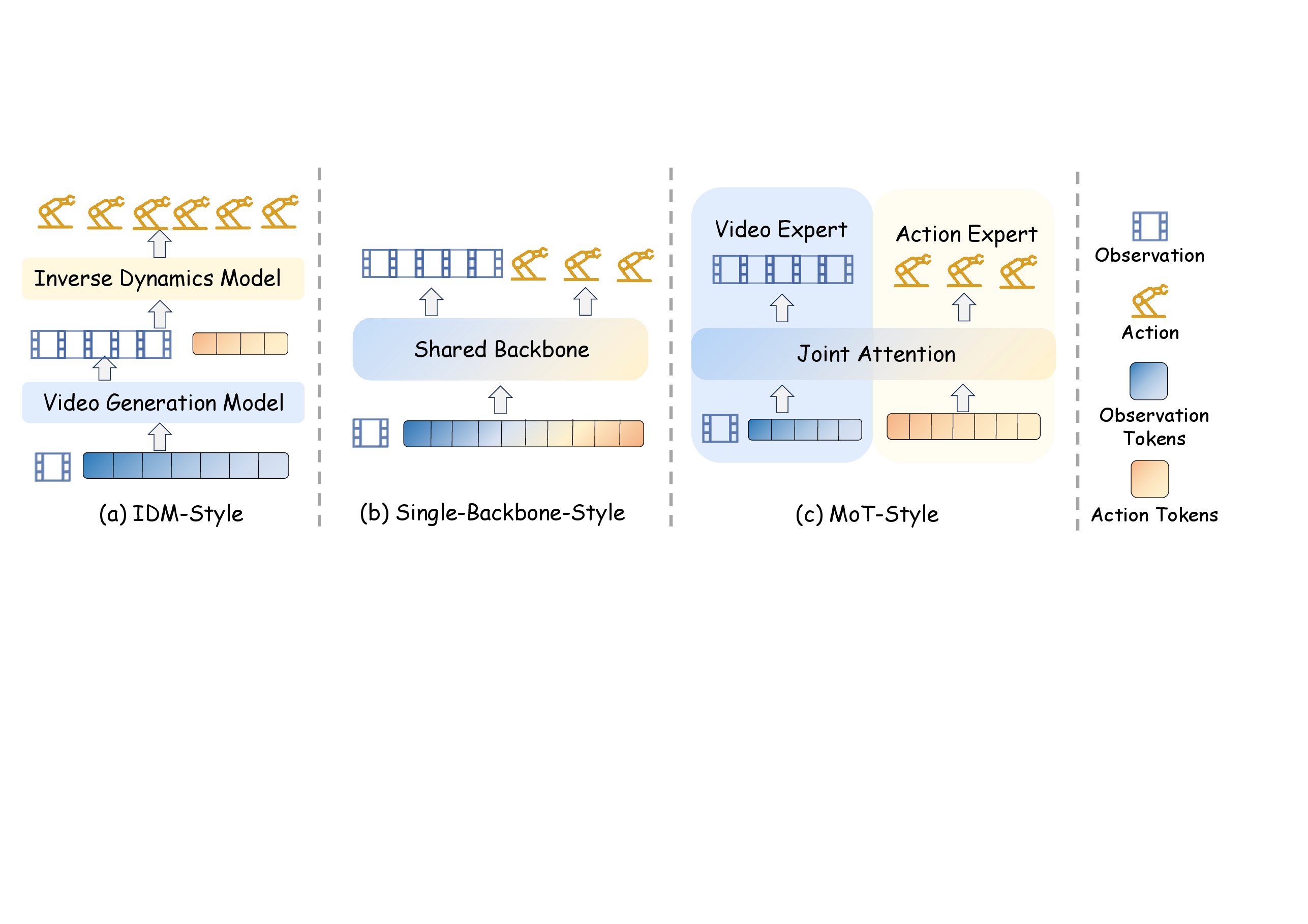
图源:World Model for Robot Learning survey,Figure 3,本站从论文 PDF 截取。原图展示 IDM-style、single-backbone-style 和 MoT-style 三种 world model 支撑 policy 的架构范式。本文读法:视频动作飞轮的关键问题是未来预测在哪里影响动作。

图源:World Action Models are Zero-shot Policies / DreamZero,Figure 1,本站从论文 PDF 截取。原图展示 DreamZero 从预训练视频扩散 backbone 出发,联合建模未来视频和动作。本文读法:它的数据飞轮关键不是“视频更多”,而是把异构机器人数据里的未来变化转成动作监督。
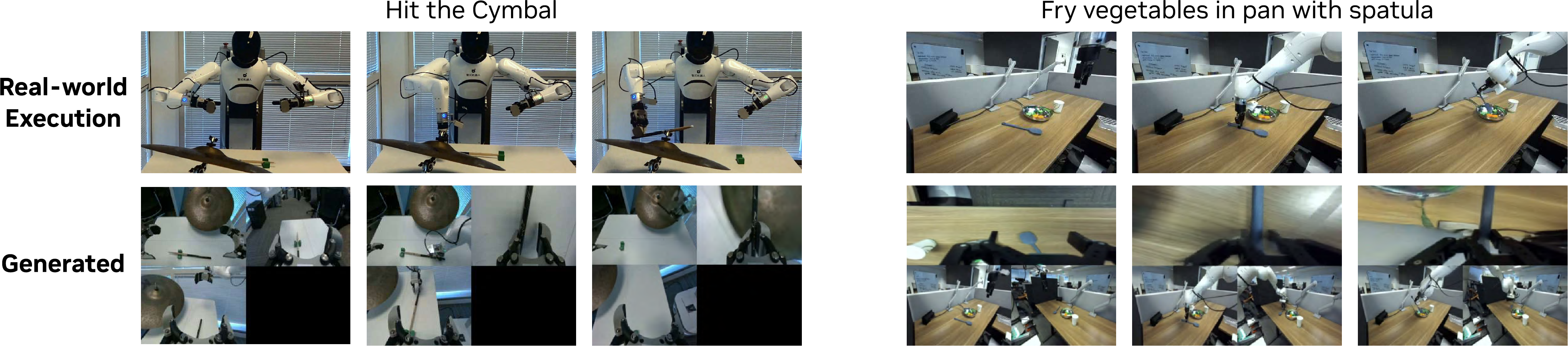
图源:DreamZero,Figure 2,本站从论文 PDF 截取。原图展示模型同时生成未来视频和动作。本文读法:动作不再是从视频后处理出来的控制量,而是在训练目标里和未来画面共同对齐。
DreamZero 的思路可以拆成三层。
| 数据层 | 论文里的作用 | 飞轮意义 |
|---|---|---|
| 大规模视频 backbone | 提供世界动态先验 | 降低从零学习物体和场景变化的成本 |
| 少量机器人动作数据 | 对齐 action chunk、本体状态和控制频率 | 把视觉动态接到目标机器人身体上 |
| video-only demo / play data / post-training | 做任务迁移和少样本适配 | 新任务不用完全从零收大量重复示教 |
这条线的边界也很重要:视频可以迁移任务目标和世界动态,迁移不了机器人的身体控制。跨机器人 video-only demo 有价值,但最后仍要用目标机器人的动作接口和控制频率完成对齐。
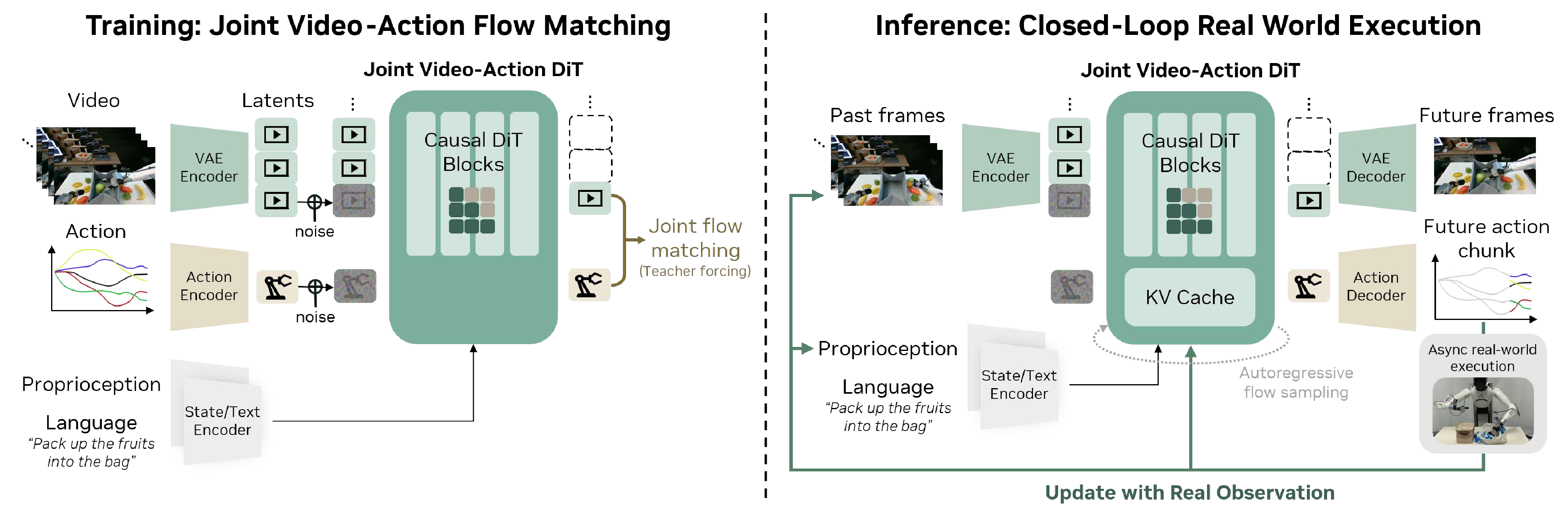
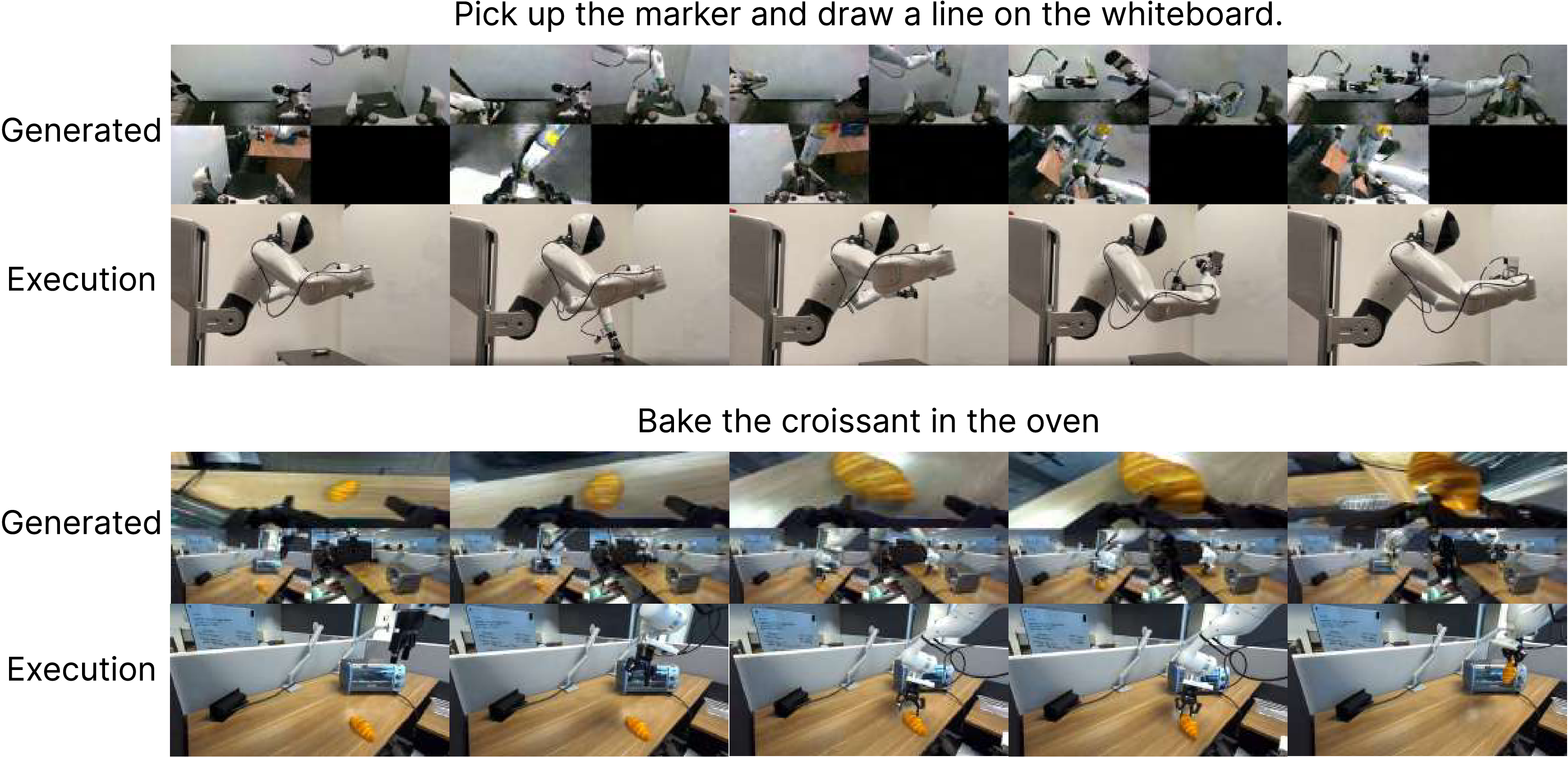
图源:DreamZero,Figure 4,本站从论文 PDF 截取。原图展示视觉上下文、语言、本体状态、未来视频 latent 和动作 latent 如何进入同一个自回归 DiT。本文读法:视频基础模型要进入机器人闭环,必须接上状态、动作、动作 chunk 和真实观测刷新,而不是只离线生成未来画面。
DreamZero 给数据飞轮的另一个启发,是推理不能长期相信自己生成的未来。真实机器人每执行一小段动作,都会得到新的观测;这些观测要回写上下文,打断错误想象的累积。对 WAM 来说,闭环观测刷新、低延迟推理和失败回放不是部署优化,而是模型能不能真机工作的前置条件。
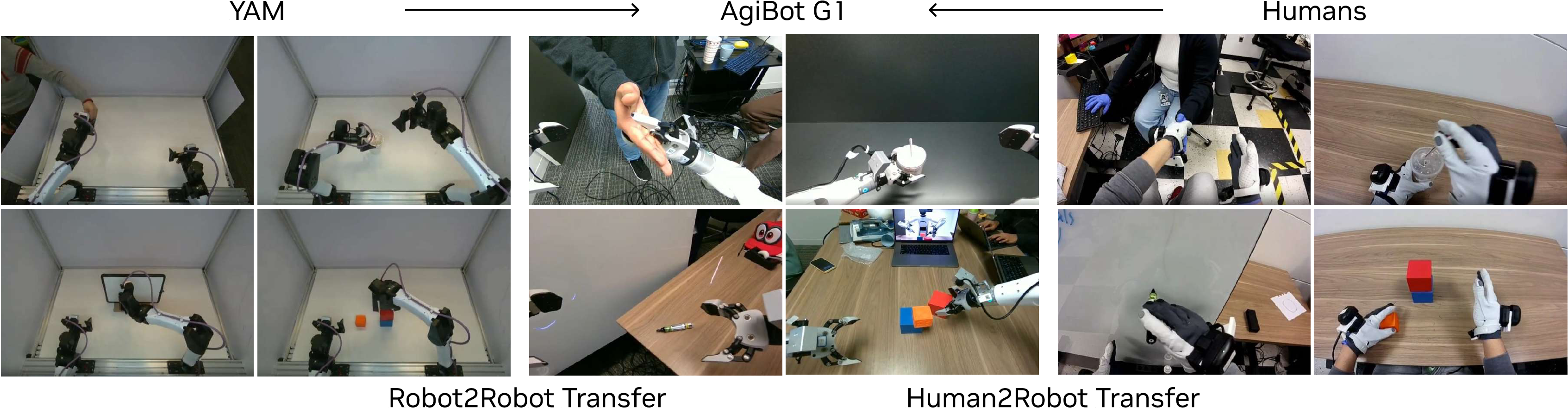
图源:DreamZero,Figure 11,本站从论文 PDF 截取。原图展示 robot-to-robot 和 human-to-robot 的 video-only demonstration 对未见任务的帮助。本文读法:视频可以跨具身共享任务动态,但不能替代目标机器人的动作对齐。
V-JEPA 2 和 WAM 可以放在一起看:先从大量观察数据里学习世界表征,再把动作接进来。V-JEPA 2 在潜空间预测未来表征,而不是直接生成像素;这使它更适合被 planner 消费,因为它的目标不是给人看漂亮视频,而是给机器人选择动作。
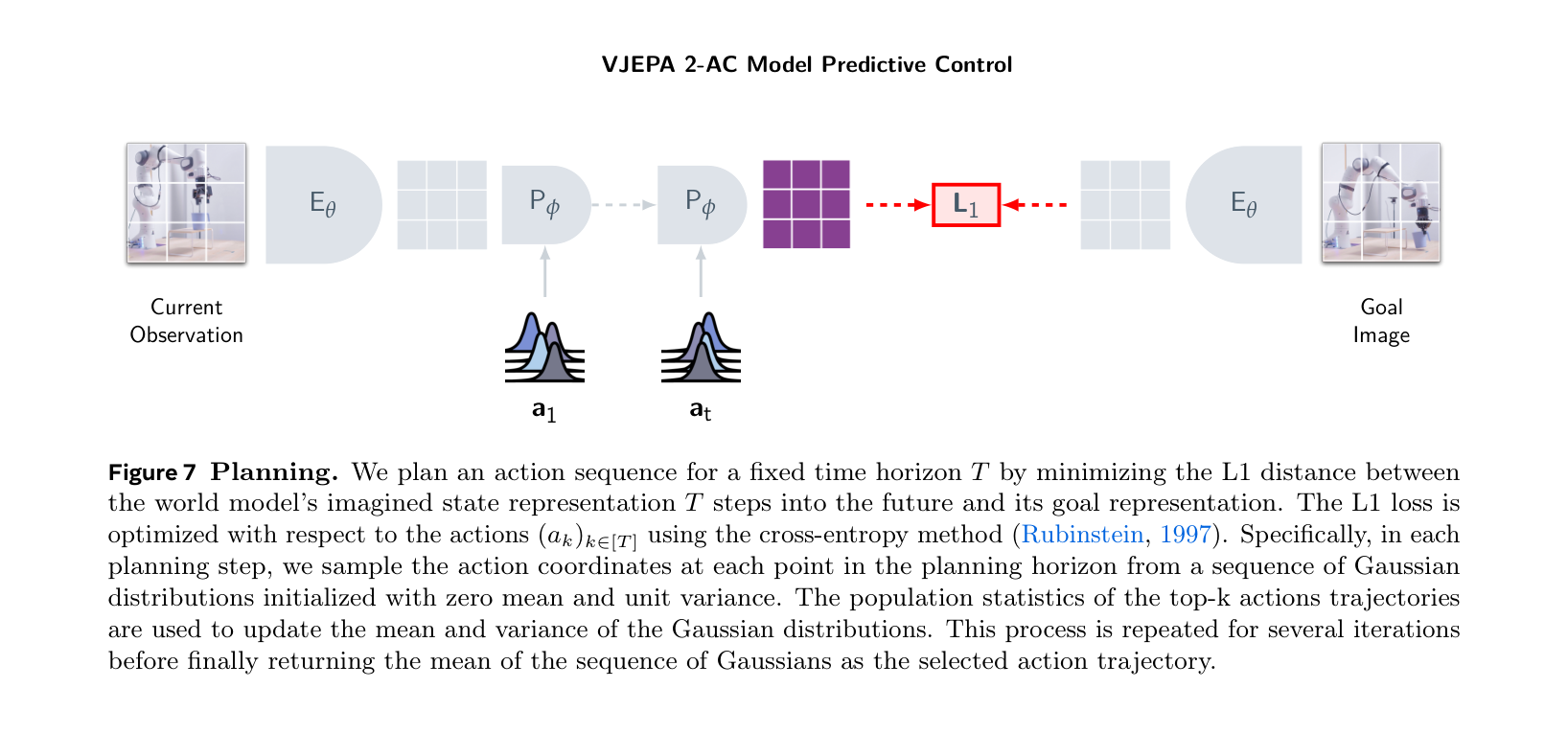
图源:V-JEPA 2,action-conditioned world model 图,本站从论文 PDF 截取。本文读法:World Model 要进入机器人闭环,必须接收候选动作并输出可用于规划的未来状态或评分。
视频动作飞轮可以按能力阶梯来判断证据强弱。更稳的拆法是三层:先能按任务想象结果,再能按动作预测未来,最后让 planner 或 MPC 真正消费这些预测。
| 能力层级 | 说明 | 证据强度 |
|---|---|---|
| task-conditioned imagination | 能想象任务完成后的状态 | 有用,但离闭环还远 |
| action-conditioned prediction | 能预测给定动作后的未来 | 更接近 policy 支撑 |
| planner / MPC 消费 | 预测真正指导动作选择 | 最接近机器人任务成功率 |
图源:World Model for Robot Learning survey,Figure 6,本站从论文 PDF 截取。原图把 robotic video world model 的能力从 task-conditioned imagination 推到 action conditioning、structure priors 和 foundation-scale video backbone。本文读法:数据 infra 的任务,是把普通视频先验一步步接到动作、结构、长时一致和真实机器人闭环上。
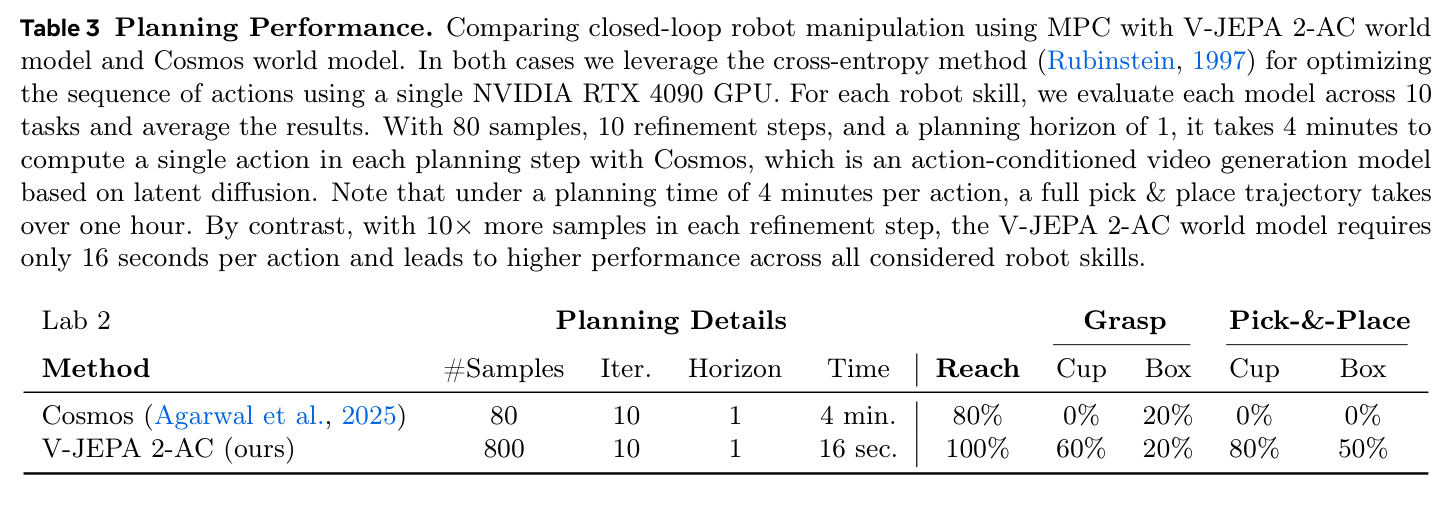
图源:V-JEPA 2,robot planning results 表,本站从论文 PDF 截取。本文读法:真正有说服力的证据,不是生成视频是否逼真,而是 World Model 被规划器消费后,机器人任务成功率是否提升。
视频动作飞轮也有风险:错误想象会给错误动作找理由。WAM 把动作和未来画面耦合,如果未来预测错了,动作选择也会跟着错,而且模型可能生成一个看起来合理的未来画面,让错误推理链自洽。
图源:DreamZero,Figure 16,本站从论文 PDF 截取。原图展示 generated video 与 executed action 的失败配对。本文读法:数据飞轮不能只回收成功视频,也必须回收“模型想象和真实执行如何一起错”的样本。
因此视频动作飞轮必须和部署回流飞轮配合。真实观测刷新、安全检查、低延迟部署、失败回放和人工接管,不是工程细节,而是 WAM 进入真机系统的底线。
范式三:部署回流飞轮,把真实失败放到中心
部署回流飞轮直接回应 evaluator 的瓶颈,但它的意义不只是为 evaluator 服务。它从根本上改变了数据采集逻辑:不是补更多成功 demo,而是补部署分布里的失败邻域。
示教分布反映的是“人类在理想条件下做任务”。真实部署分布反映的是“机器人在真实条件下,经常处于半成功、半失败之间”。这两个分布之间的缺口,不会随着收集更多顺利示教而缩小,只会随着真实部署失败数据的回流而缩小。
部署回流飞轮最重要的一句是:部署回流不是补数据量,而是补分布缺口。 训练集里常见的是完整成功轨迹,部署里常见的是偏离后的中间状态;如果这些状态没有进入训练集和验证集,evaluator 就无法知道哪个 checkpoint 真正适合上线。
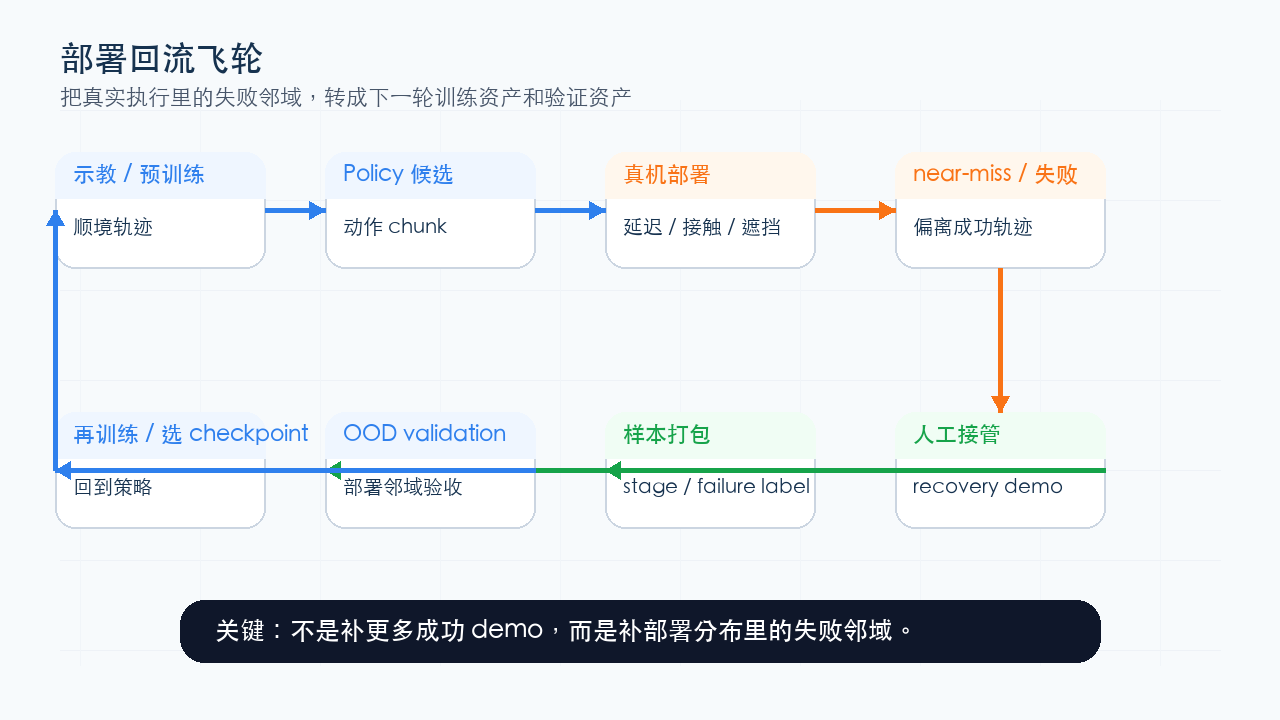
图源:本站自绘。它把部署回流拆成示教、policy 候选、真机部署、near-miss / 失败、人工接管、样本打包、OOD validation 和再训练。本文读法:部署飞轮不是“多收 demo”,而是让失败邻域进入训练和验证。
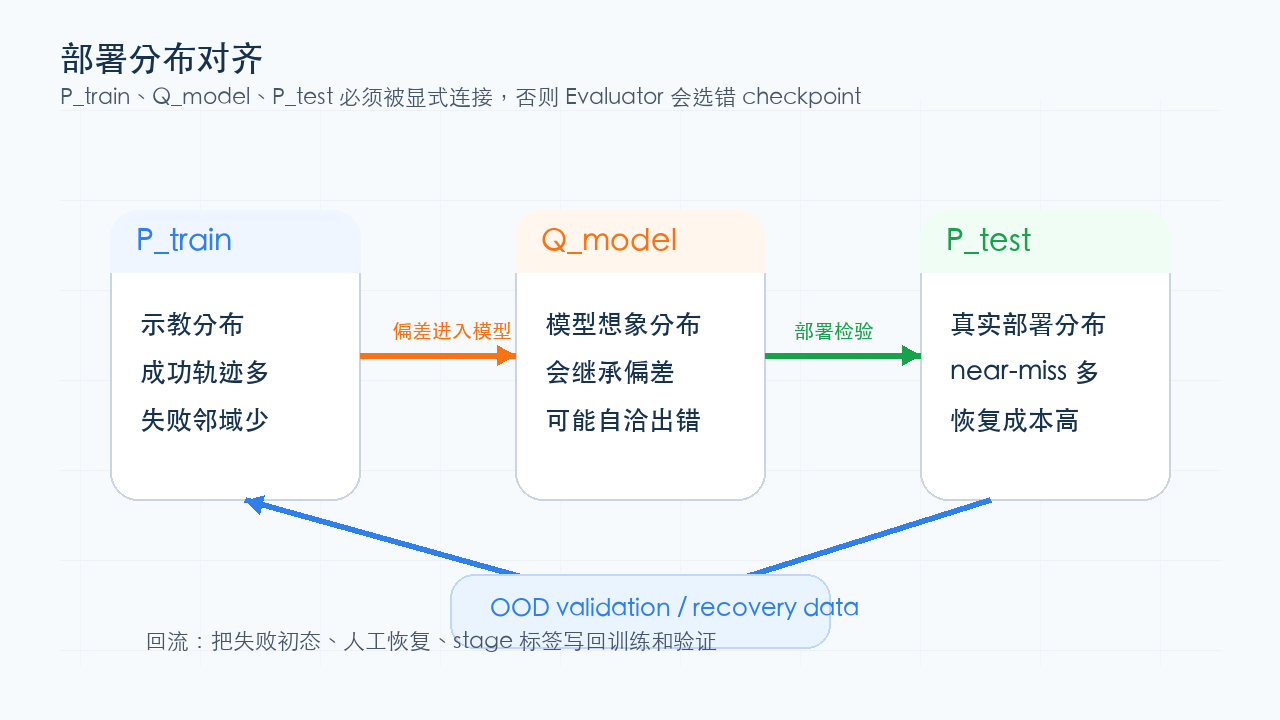
图源:本站自绘。它把 、、 画成三类分布。本文读法:evaluator 如果只见过训练顺境,就会选错 checkpoint;必须用 recovery data 和 OOD validation 把部署分布写回系统。
kai0 的飞轮可以写成:
1 | expert demos |
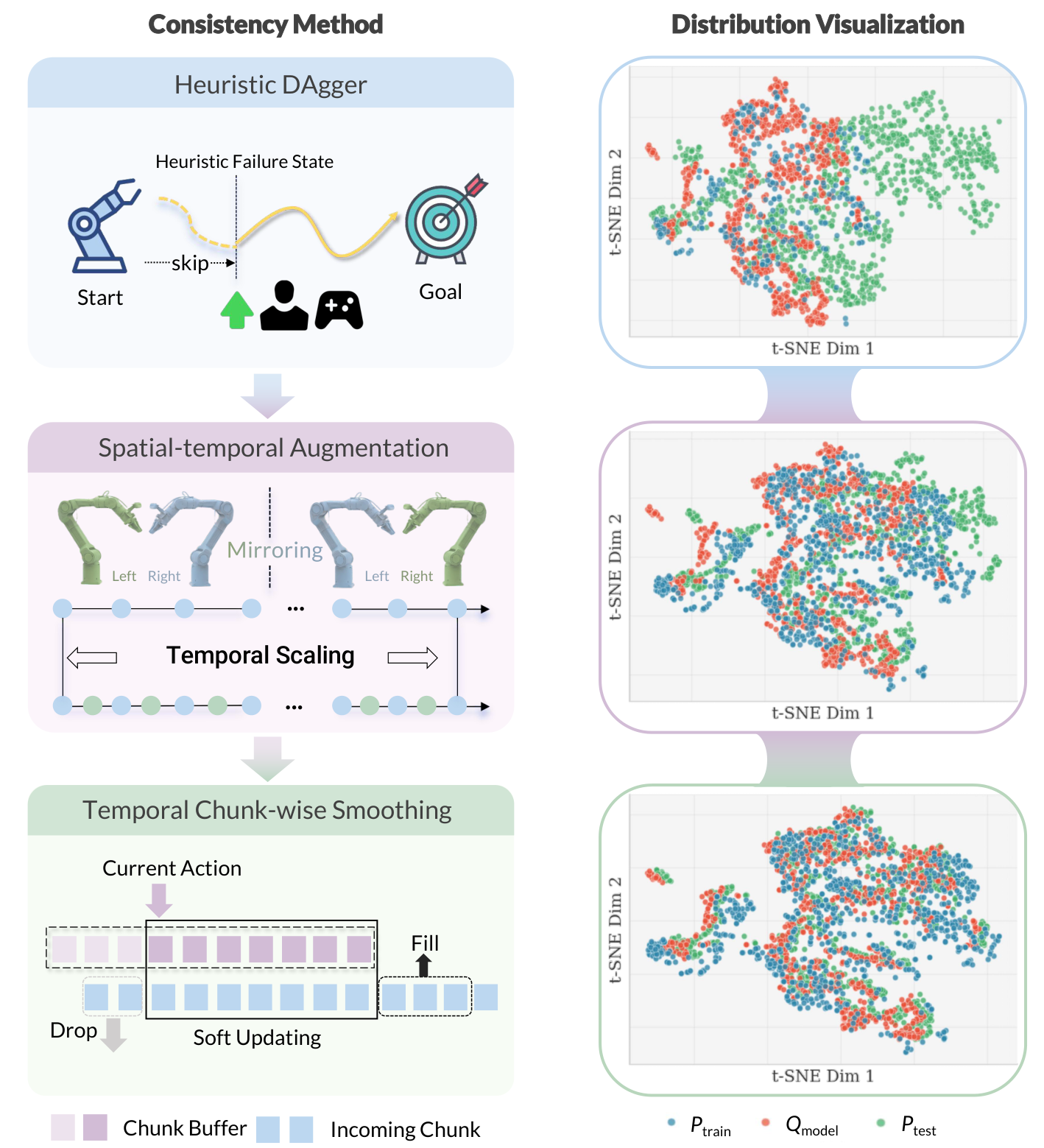
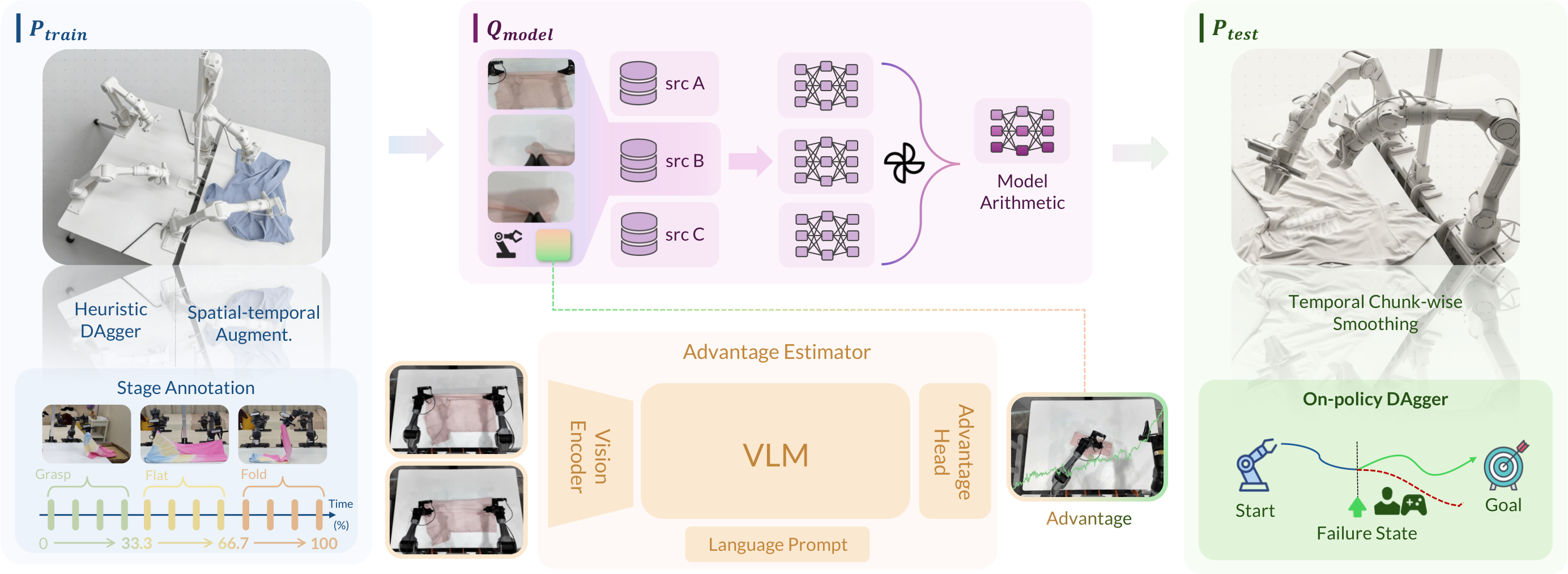
图源:kai0,Figure 4,本站从论文 PDF 截取。原图展示 Heuristic DAgger、spatio-temporal augmentation 和 temporal chunk-wise smoothing。本文读法:部署回流飞轮不是只把失败视频存起来,而是把失败初态、恢复动作、动作平滑和验证集选择一起纳入系统。
这篇论文最值得借鉴的不是某一个模块名,而是工程习惯。
| 模块 | 数据飞轮读法 |
|---|---|
| Heuristic DAgger | 把失败初态和人工恢复动作收回训练集 |
| Stage Advantage | 让 policy 知道任务处于哪个阶段,而不只看当前图像 |
| Chunk smoothing | 处理 action chunk 接缝处的抖动,降低执行中的失败率 |
| OOD validation | 验证集来自部署失败邻域,而非训练顺境样本 |
| Model arithmetic | 用多个数据子集训练出的 checkpoint 形成策略多样性,再用部署邻域验证 |
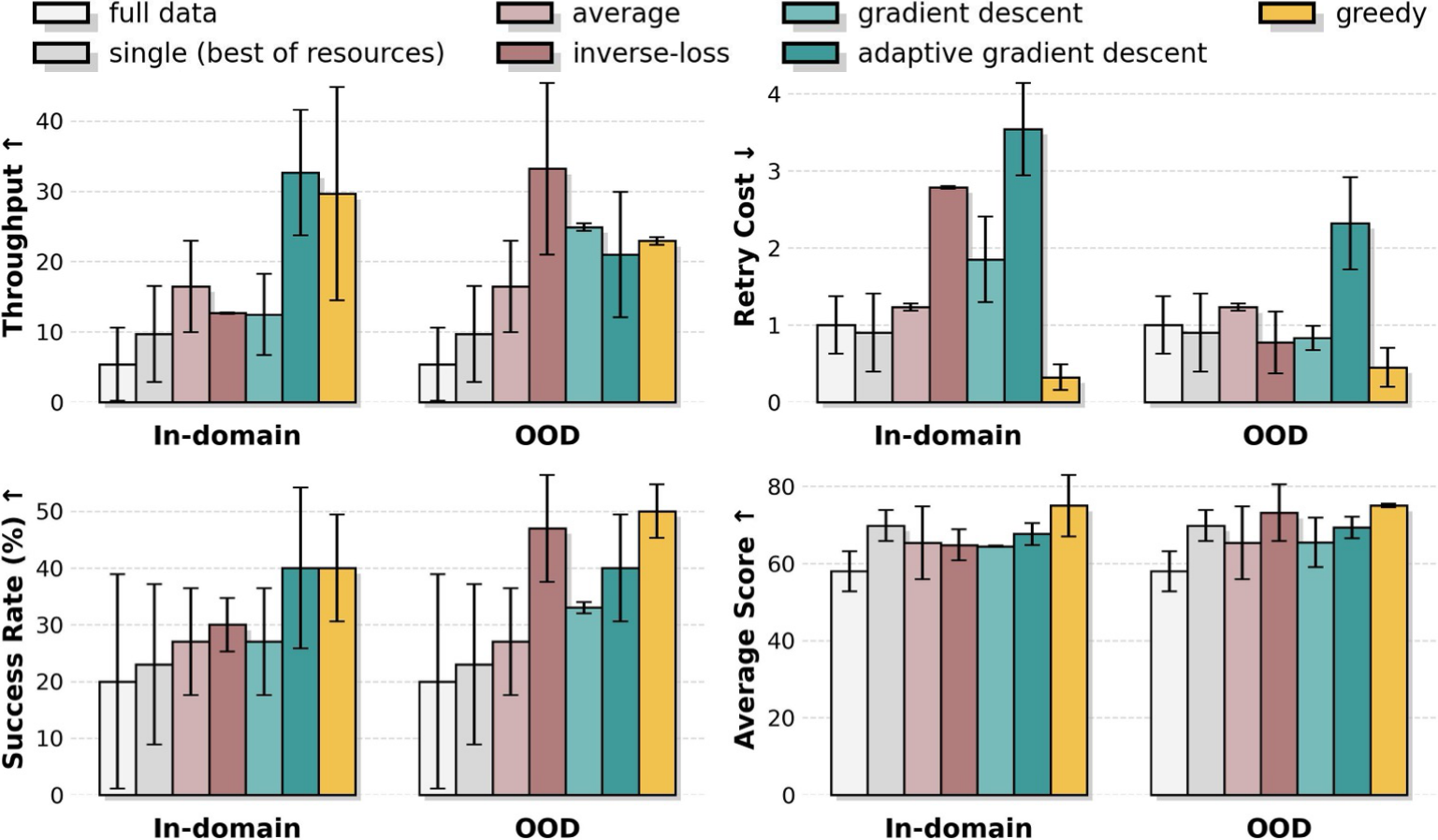
图源:kai0,Figure 7,本站从论文 PDF 截取。原图比较 model arithmetic 变体、single-best 和 full-data candidate。本文读法:checkpoint 合并本身不是魔法,关键在于用更接近部署失败邻域的 OOD validation 来选择和验证策略。
图源:kai0,Figure 3,本站从论文 PDF 截取。原图展示 stage advantage 如何把阶段信息注入训练。本文读法:长时任务里的相似视觉状态,需要 stage / progress 这样的结构化标签,否则动作很容易错位。
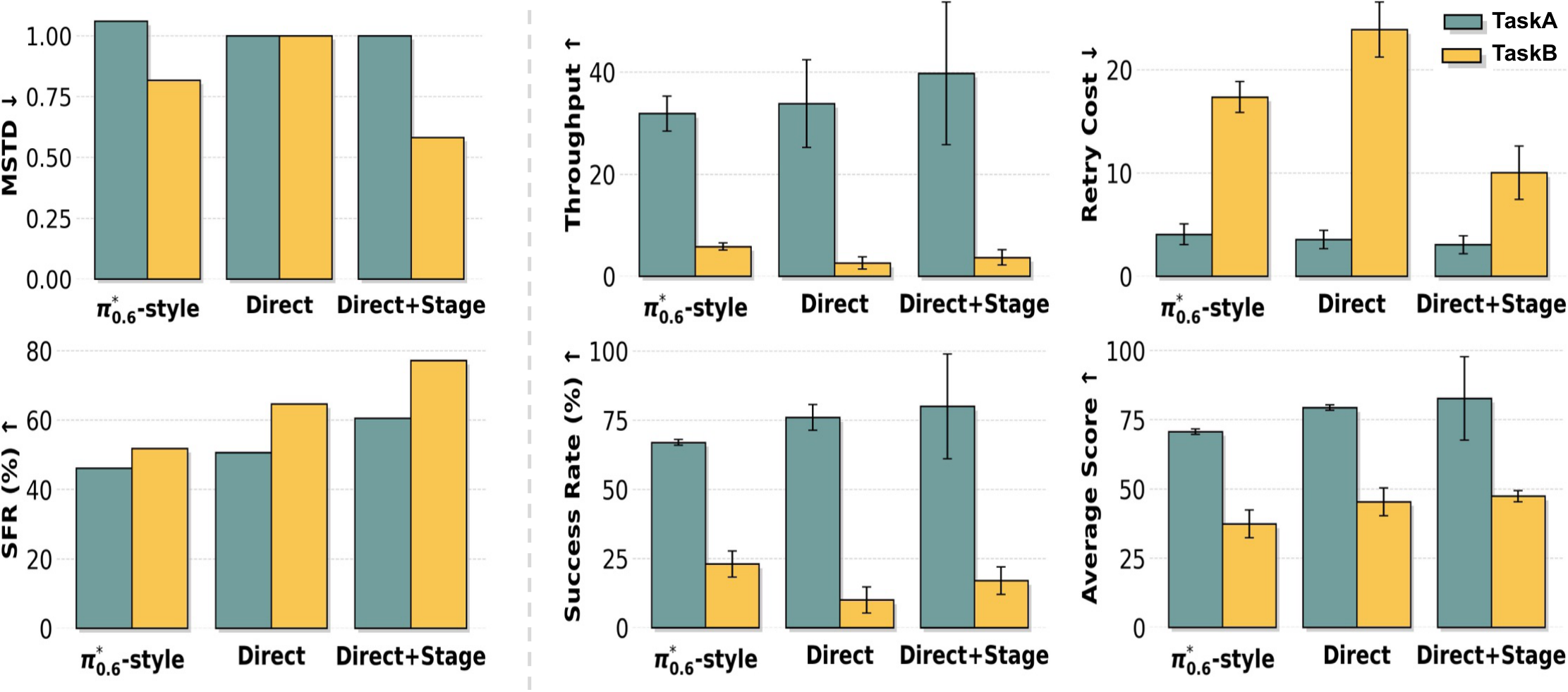
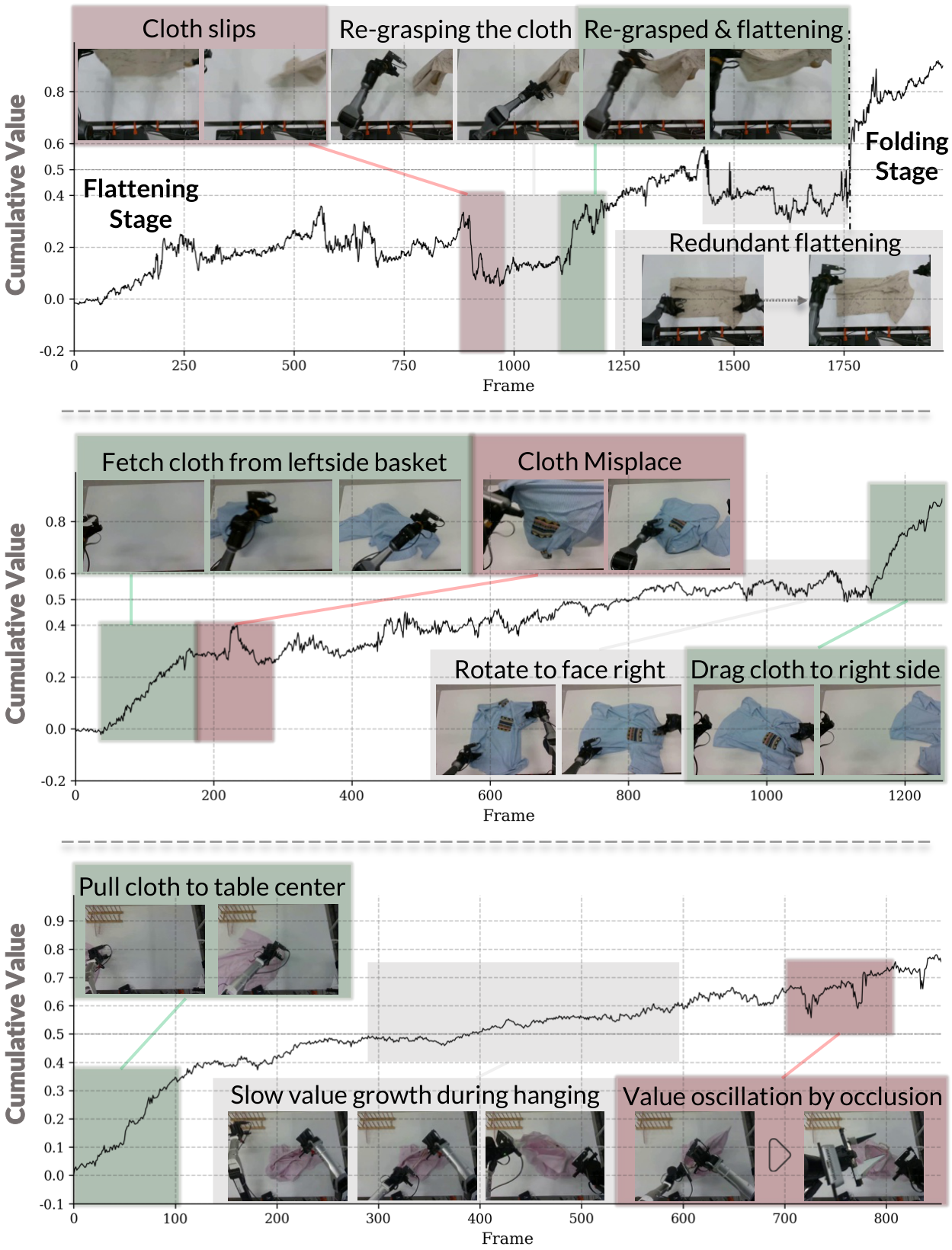
图源:kai0,Figure 8,本站从论文 PDF 截取。原图比较 Stage Advantage 的稳定性和任务表现。本文读法:长时任务不能只记录最终成功失败,还要记录 stage、progress、停滞和回退,才能把失败回流变成可训练信号。
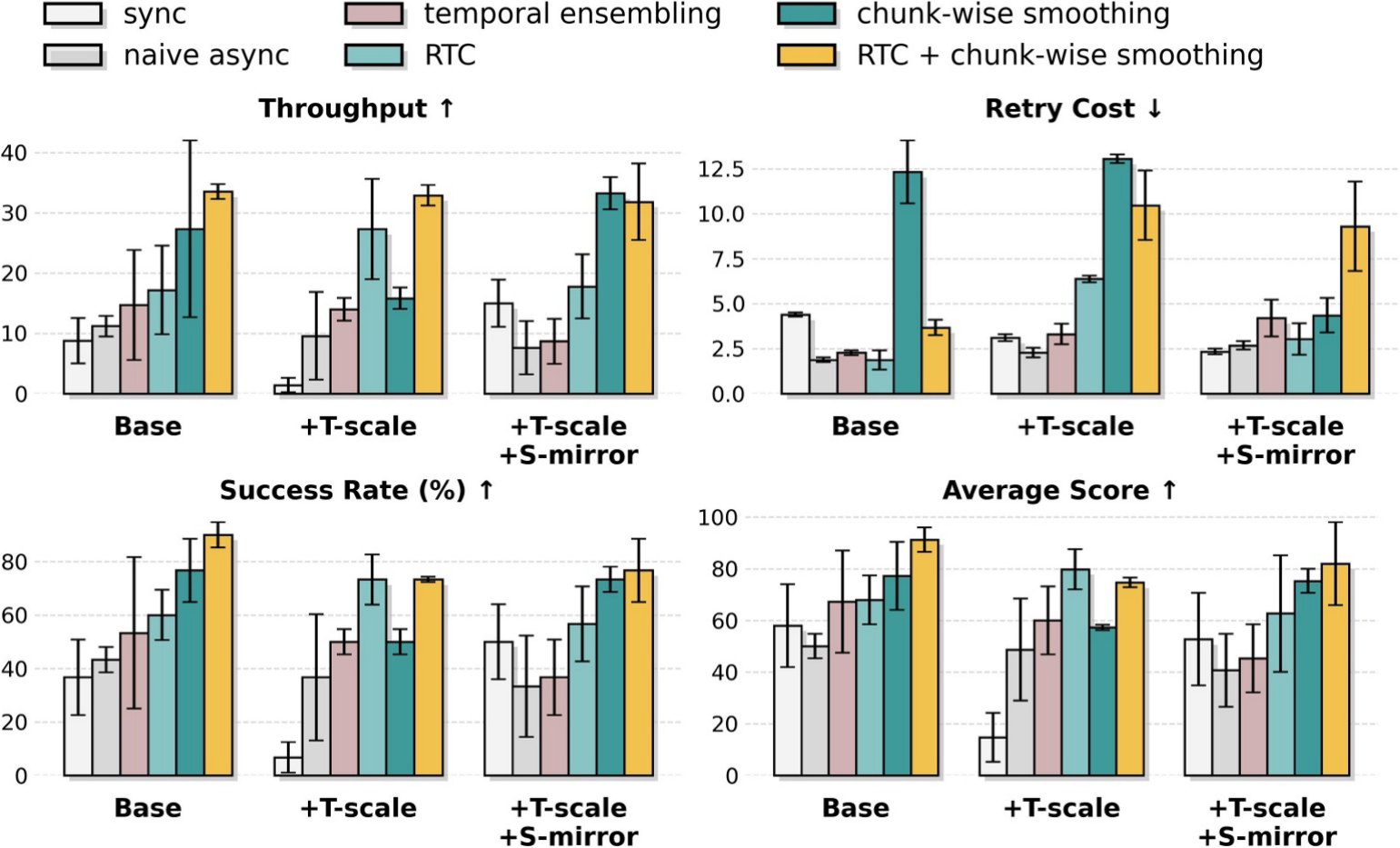
图源:kai0,Figure 11,本站从论文 PDF 截取。原图比较 temporal chunk-wise smoothing、temporal ensembling、RTC 和增强策略。本文读法:数据飞轮最后要落到真实控制链路,推理延迟、动作 chunk 接缝和低层控制频率都会决定回流数据能否转化成可靠执行。
这里也必须保留边界。kai0 的证据集中在特定双臂衣物任务族、特定硬件平台和采集方式下。它的价值不在于证明“任意 20 小时数据都够”,而在于证明:当数据回流、验证分布和部署分布被系统性对齐时,真实机器人任务可以显著变稳。
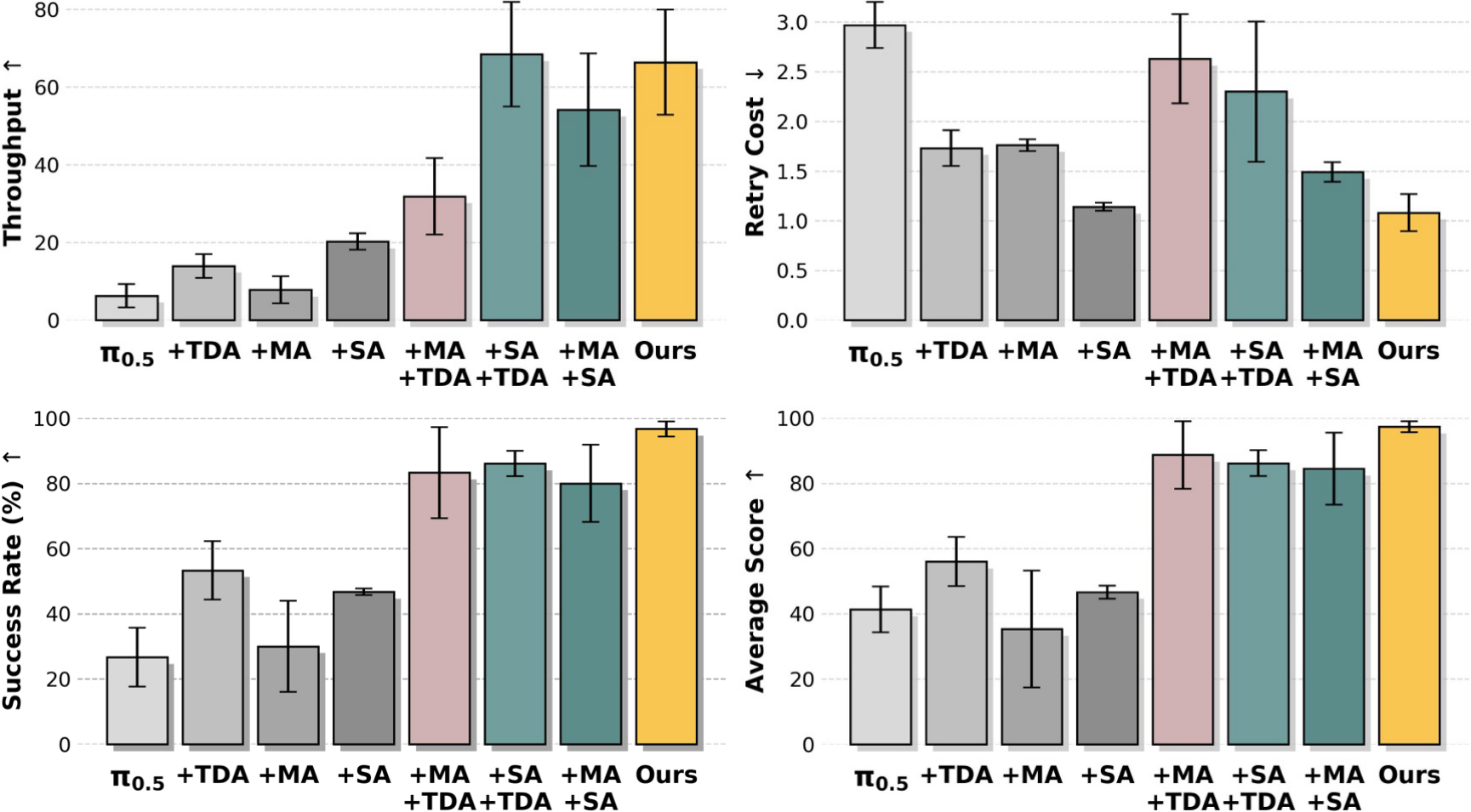
图源:kai0,system efficacy 图,本站从论文 PDF 截取。本文读法:部署飞轮的可信度来自边界清楚,而不是 claim 更大。有效性必须绑定任务族、硬件系统、采集方式、验证分布和运行环境。
范式四:混合生成飞轮,真实、仿真、合成互相校正
第四条飞轮是把前三条整合起来的系统视角:真实、仿真和合成数据不是三堆数据相加,而是在 World Model 框架下互相校正。
真实机器人数据是校正锚点。它提供接触力、传感器噪声、控制延迟和真实部署分布,这些是仿真和生成难以完全复现的。仿真数据提供可控性,可以系统生成碰撞、长尾初态和任意相机视角。生成式 World Model 可以扩充候选未来,预演风险。
最大风险是偏差循环:如果合成数据生成后没有被真实失败数据校正,就会把 World Model 已有偏差再喂给 World Model,让偏差在每一轮迭代里越积越深。所以混合生成飞轮的关键不是“生成更多”,而是“生成之后如何验收、过滤、回流”。
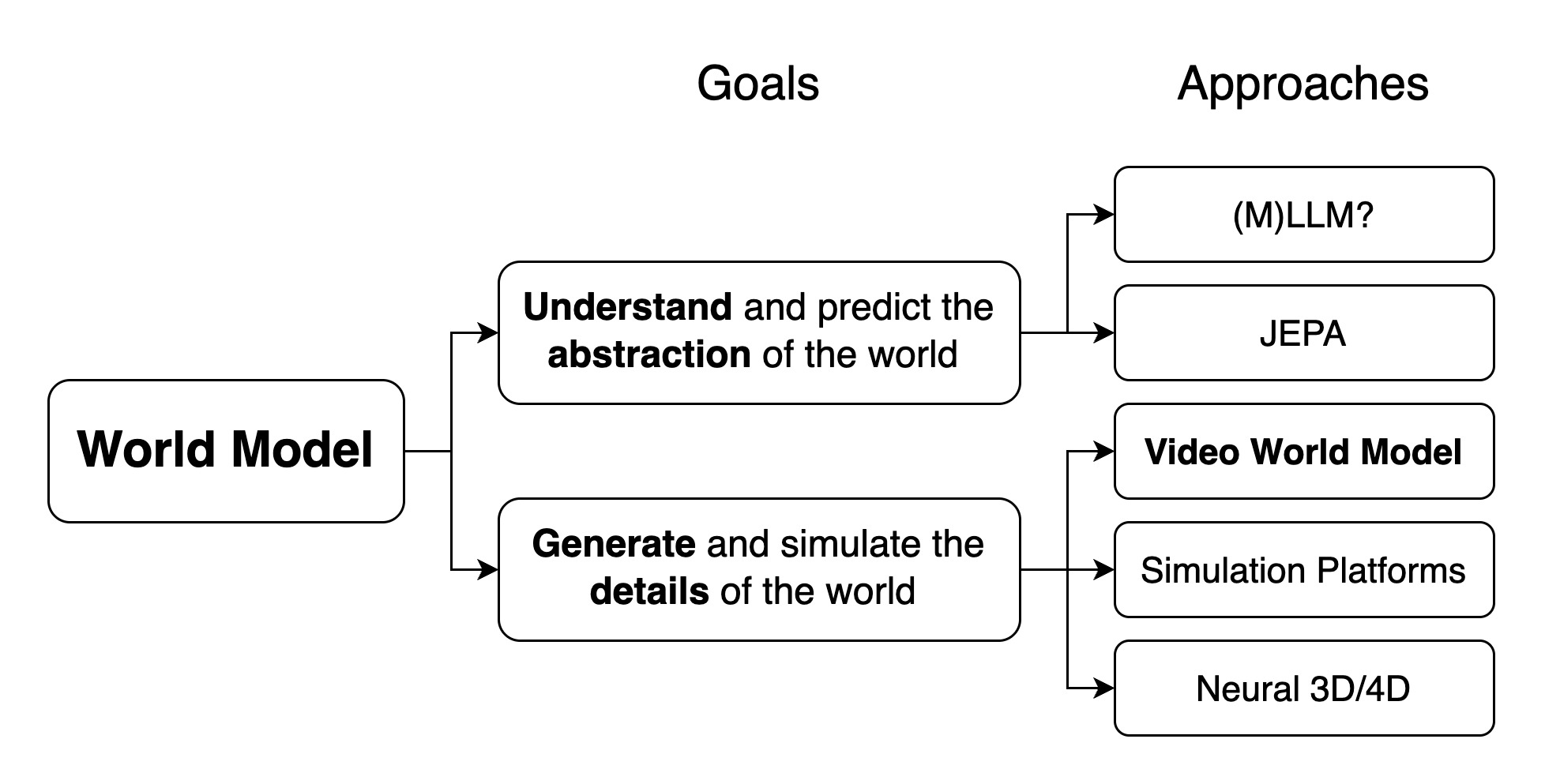
图源:Towards Video World Models,Figure 2,本站从论文 / 项目材料归档。原图把 internal world model、external world model、video world model、simulation platform 和 neural 3D/4D 放在同一张 taxonomy 里。本文读法:混合生成飞轮不是单一视频生成路线,而是物理仿真、视频生成、3D/4D 表示和内部动态模型互相补位。
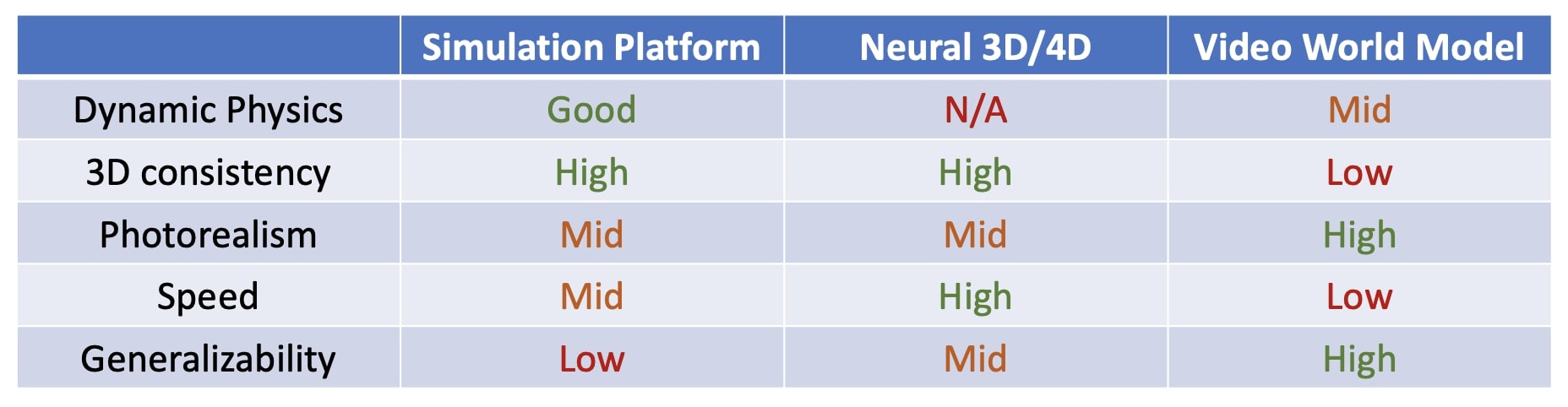
图源:Towards Video World Models,simulation approaches 图,本站从论文 / 项目材料归档。本文读法:仿真、视频生成和世界模型服务化之间不是替代关系,而是用真实数据互相校正的工程栈。
| 数据域 | 适合提供什么 | 主要风险 |
|---|---|---|
| 真实机器人数据 | 接触、传感器噪声、控制延迟、部署分布 | 贵、慢、失败样本不均匀 |
| 互联网 / 第一视角视频 | 人类活动、物体动态、语义和视觉变化先验 | 没有机器人动作接口,因果控制弱 |
| 3D / 仿真数据 | 可控场景、反事实、碰撞、长尾初态 | sim-to-real gap、资产和材质偏差 |
| 合成 world model 数据 | 扩充候选未来、生成风险预演 | 可能把模型偏差重新喂给模型 |
| 部署遥测 | 真实失败、near-miss、延迟和恢复轨迹 | 需要隐私、安全和数据治理 |
这条飞轮的工程验收点不是“合成比例是多少”,而是三件事。第一,合成样本有没有被真实数据过滤;第二,仿真场景有没有被几何资产和失败回放校准;第三,生成出来的风险样本有没有进入 OOD validation,而不是只进入训练集。
这部分可以接到 世界模型 Infra 的工程视角:数据湖、streaming I/O、记忆检索、分布式训练、服务化部署和边缘回传,不是外围工具,而是 World Model 能持续运行的基础设施。
flowchart LR
A["Real robots
success / failure / recovery"] --> D["Versioned data layer
schema / replay / quality"]
B["Simulators
physics / counterfactual / long-tail"] --> D
C["Synthetic WM data
future candidates / risk cases"] --> D
D --> E["Training
geometry / WAM / policy / evaluator"]
E --> F["Serving
cloud WM / edge policy / safety"]
F --> G["Robot deployment"]
G --> H["Telemetry
near-miss / latency / human takeover"]
H --> D
H --> B
H --> C
一张总表:四条飞轮分别修什么
| 范式 | 最小闭环 | 代表输入 | 代表输出 | 最适合的机器人任务 | 最大短板 |
|---|---|---|---|---|---|
| 几何资产飞轮 | RGB 轨迹 -> 几何伪标签 -> 轨迹质检 / 空间 token -> 下游策略 | 多视角图像、视频、深度、相机 | depth、ray、camera、scene tokens、point cloud | 抓取前感知、导航、数据清洗、仿真资产 | 不直接证明动作因果 |
| 视频动作飞轮 | 大视频先验 -> 机器人动作对齐 -> WAM -> 失败 / 新任务回流 | 视频、语言、本体状态、action chunk | future video、action chunk、latent dynamics | 新任务泛化、跨具身迁移、少样本适配 | 错误想象会诱导错误动作 |
| 部署回流飞轮 | 示教 -> policy -> 真机部署 -> failure / recovery -> OOD validation | 人类示教、失败初态、stage、部署 trace | recovery data、stage advantage、平滑动作、合并 checkpoint | 长时操作、衣物、恢复、低重试部署 | 人工恢复和任务标注成本仍在 |
| 混合生成飞轮 | 真实校正仿真 -> 仿真 / 合成扩长尾 -> 真实失败再校正 | 真实、仿真、合成、遥测 | counterfactual data、risk cases、评测集 | 长尾场景、危险动作预演、系统评测 | sim-to-real 和 model bias recycling |
可以把几篇论文的启发压成四句话:
1 | DA3 / VGGT-Ω 解决“世界状态怎样可计算、可质检、可复用”。 |
对 robotics 基础设施公司的判断
如果文章只停留在“数据很重要”,这句话其实没什么信息量。更具体的判断应该是:World Model 越强,对持续回流经验的需求越高,而不是越低。
原因很简单。更强的 World Model 可以消费更细粒度的数据,也会更快把已有数据吃完,进入需要新经验才能继续提升的阶段。一次性的大规模数据集不够,持续采集、清洗、回流、验证的系统才是基础设施。
这也是和“下半身公司”讨论时最容易分叉的地方。硬件和运控当然是真问题,但从产业供给看,很多机器人本体已经足够强壮,真正稀缺的是把本体跑出来的真实经验沉淀成数据资产的基础设施。没有这层 infra,开源模型再好,也只是拿到一个需要被喂养、被校准、被验证的外部变量。
所以真正值得关注的 robotics 基础设施公司,可能不是只做本体,也不是只等开源模型,而是能把真实世界经验持续变成三类资产的公司:
| 资产 | 含义 |
|---|---|
| 训练资产 | 可训练的几何状态、动作后果、任务阶段和恢复轨迹 |
| 验证资产 | 贴近部署分布的 OOD validation、风险场景和回归集 |
| 回流资产 | near-miss、失败、人工接管、重试成本和真实遥测 |
最后的结论是:
机器人 World Model 的数据飞轮,不是“真实、仿真、合成”三堆数据相加,而是“几何状态、动作后果、部署失败、反事实长尾”四条回路互相校正。
硬件越强壮,瓶颈越会被推到经验生产系统上。谁能更稳定地把真实世界经验变成训练资产、验证资产和回流资产,谁就更接近下一代机器人基础设施公司的样子。
最终可以把全文收成一句话:能持续生产经验的系统,才是真正的机器人基础设施。
证据边界
- 产业报道用于说明“模型架构优先”观点真实存在,不作为技术实验证明。
- 论文图用于解释数据飞轮范式,不意味着不同任务和本体可以直接外推同等效果。
- kai0 的强证据绑定特定双臂衣物任务族、硬件系统、训练资源和验证分布。
- DreamZero / V-JEPA 2 的价值在于说明视频动作飞轮的方向,但真实机器人闭环仍需要动作接口、真实观测刷新、延迟、安全和失败回流。
- DA3 / VGGT-Ω 说明几何资产飞轮的空间基础价值,但几何可定位不等于动作可执行。
外部精读
- 原论文:Depth Anything 3: Recovering the Visual Space from Any Views。
- 项目页:Depth Anything 3。
- 原论文:VGGT-Ω。
- 项目页:VGGT-Ω。
- 原论文:World Action Models are Zero-shot Policies / DreamZero。
- 项目页:DreamZero。
- 原论文:χ₀: Resource-Aware Robust Manipulation via Taming Distributional Inconsistencies。
- 项目页:kai0。
- 背景论文:V-JEPA 2。
- 背景数据:Open X-Embodiment;DROID。
- 综述论文:World Model for Robot Learning: A Comprehensive Survey。
- 综述论文:A Comprehensive Survey on World Models for Embodied AI。
- 综述博客 / 论文:Towards Video World Models。
- 数据 infra:LeRobotDataset v3.0。
- 数据配方:π0.5 blog。
- 产业观点:21 财经:宇树科技王兴兴谈模型与数据;36 氪:聊模型的王兴兴。
相关阅读与下一步
- 站内下一步:WAM 与 3D 视觉:世界模型从视频想象走向物理闭环。
- 站内下一步:世界模型 Infra:从模型谱系到物理 AI 工程栈。
- 站内下一步:具身智能现状:VLA、数据工厂与真实闭环。
- 站内下一步:Depth Anything 3:任意视角的 3D 几何底座。
- 站内下一步:VGGT-Ω:几何重建怎样变成具身空间表征。
- 站内下一步:DreamZero:世界动作模型为什么可以做零样本策略。
- 站内下一步:kai0:资源受限下的高可靠机器人操作。
- Title: 思考探索:世界模型驱动的机器人数据飞轮:能持续生产经验的系统,才是真正的基础设施
- Author: Charles
- Created at : 2026-06-26 09:00:00
- Updated at : 2026-06-26 09:00:00
- Link: https://charles2530.github.io/2026/06/26/ai-files-thinking-exploration-robot-data-flywheel-world-models/
- License: This work is licensed under CC BY-NC-SA 4.0.