
论文专题讲解:Dreamer:Latent Imagination 控制
- 论文:
Dream to Control: Learning Behaviors by Latent Imagination - 系统:
Dreamer - 链接:arXiv:1912.01603
- 项目页:danijar.com/dreamer
- 关键词:Dreamer、RSSM、latent imagination、analytic value gradients、model-based RL、actor-critic
这篇论文是从 PlaNet 到 DreamerV3 之间最关键的一步。PlaNet 已经证明了可以从像素交互轨迹中学习 RSSM world model,并在 latent space 中用 CEM 做在线规划。Dreamer 的核心变化是:不再每个环境 step 都做昂贵的在线搜索,而是在 learned world model 的 latent imagination 中训练 action model 和 value model。
可以把 Dreamer 压缩成一句话:
1 | experience replay |
它回答的问题不是“未来视频长什么样”,而是“如果我在当前 latent state 里采取某个动作,未来 latent state、reward 和 value 会怎么变化”。这让 Dreamer 成为交互轨迹驱动 latent dynamics 世界模型路线的核心节点。
 { width=“320” .atlas-figure-tall }
{ width=“320” .atlas-figure-tall }
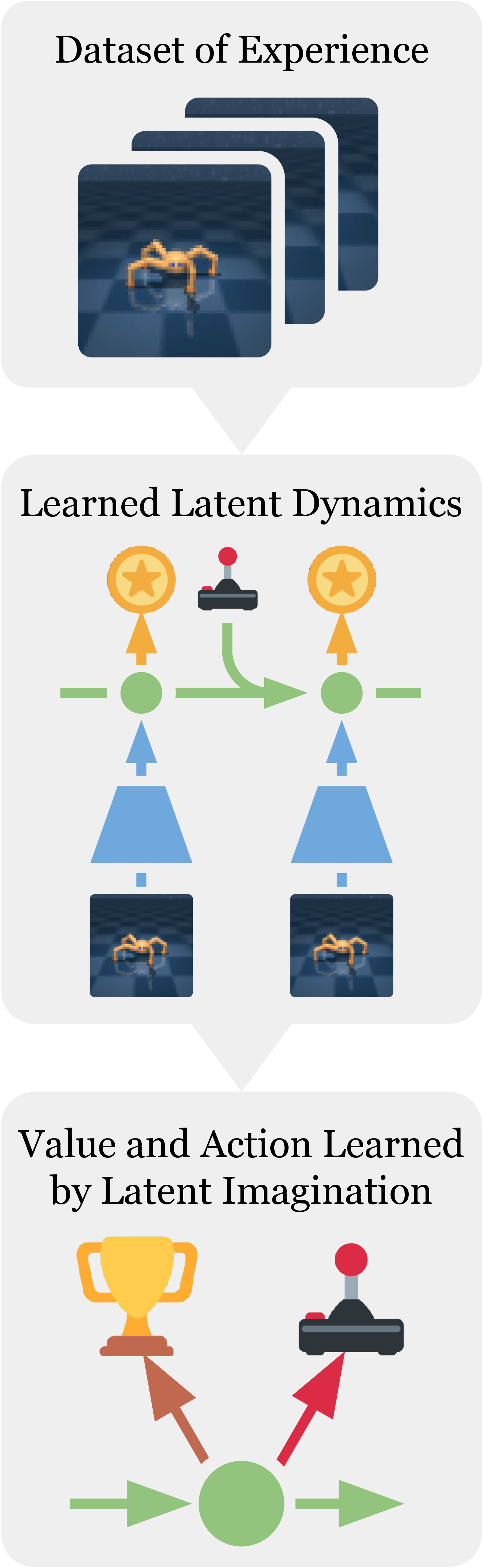
Figure source: Dream to Control, Figure 1. 原论文图注要点:Dreamer 从历史经验中学习 world model,并在其 latent space 中通过把 value estimates 反向传播穿过 imagined trajectories 来高效学习长视野行为。
论文位置
Dreamer 的历史位置可以这样理解:
| 阶段 | 代表 | 行为生成方式 | 关键变化 |
|---|---|---|---|
| Latent planning | PlaNet | 每步用 CEM 在线规划 | RSSM 从像素学习可 rollout 的 latent dynamics |
| Latent imagination actor-critic | Dreamer | 在 imagined trajectories 上训练 actor 和 critic | 把在线 planning 成本摊到 policy learning |
| Robust generalist world model RL | DreamerV3 | 固定超参数跨域训练 | 用离散 latent、symlog、twohot、free bits 等提升鲁棒性 |
PlaNet 和 Dreamer 的 world model 很接近,但使用方式不同:
| 维度 | PlaNet | Dreamer |
|---|---|---|
| 动作选择 | CEM online planning | learned action model |
| 价值估计 | 累加 planning horizon 内 reward | value model 估计 horizon 之后的收益 |
| 推理成本 | 每步大量采样 action sequences | actor 一次前向输出动作 |
| 训练重点 | world model + planner | world model + imagined actor-critic |
| 主要收益 | 数据效率高 | 数据效率高且计算更省,长视野行为更强 |
因此,Dreamer 不是替代 world model,而是把 world model 从“每步搜索的模拟器”变成“训练策略的 imagination environment”。
核心问题
Dreamer 针对 PlaNet 之后的两个问题。
第一,在线规划成本高。PlaNet 每个环境 step 都要在 latent space 中采样大量候选 action sequences,再用 RSSM rollout 评估 reward。这个过程比 model-free actor 慢得多,也不适合高频控制。
第二,固定 planning horizon 容易短视。只优化 horizon 内 reward,会让 agent 倾向于短期收益,尤其在 Acrobot、Hopper 这类需要长时信用分配的任务中问题明显。单纯把 horizon 变长又会让搜索空间和模型误差快速放大。
Dreamer 的解法是引入 latent actor-critic:
- action model 负责直接给出动作;
- value model 负责估计 imagination horizon 之后的收益;
- actor 的梯度不通过 REINFORCE 估计,而是通过 reparameterization 反向穿过 latent dynamics、reward model 和 value model。
这就是论文标题里 Dream to Control 的含义:控制策略不是直接从真实环境 reward 里慢慢试出来,而是在 learned world model 里通过想象轨迹训练出来。
总体结构
Dreamer 包含三件事:学 dynamics、学 behavior、和环境交互。
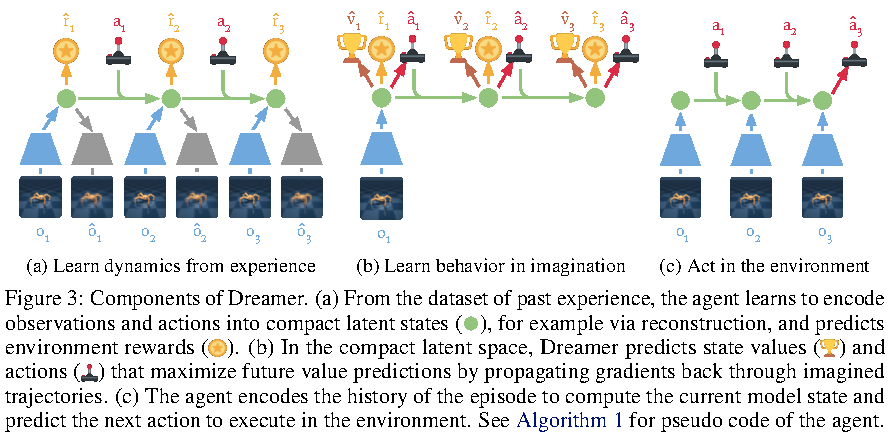
Figure source: Dream to Control, Figure 3. 原论文图注要点:该图展示 Dreamer 的三个组件。模型先从经验数据中把观测和动作编码到 compact latent states,并预测 reward;然后在 compact latent space 里预测 value 和 action,通过 imagined trajectories 反向传播梯度;最后在真实环境中用 episode 历史编码当前 model state 并输出下一步动作。
对应到训练循环:
1 | 初始化 replay dataset,先收集 S 个随机 seed episodes |
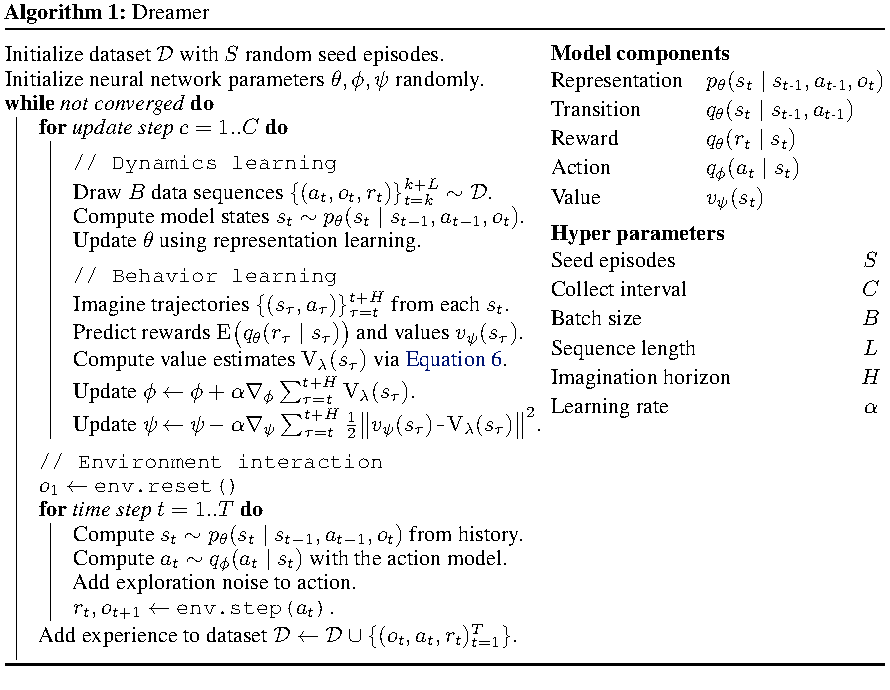
Figure source: Dream to Control, Algorithm 1. 原论文图注要点:伪代码把 Dreamer 拆成 dynamics learning、behavior learning 和 environment interaction;模型组件包括 representation、transition、reward、action 和 value,核心超参包括 seed episodes、collect interval、batch size、sequence length、imagination horizon 和 learning rate。
Dreamer 的训练循环有三件事交替发生:先从 replay buffer 采样真实轨迹训练 world model;再冻结 world model,在 latent imagination 里 rollout 多步,训练 actor 和 value;最后用更新后的 actor 去环境里收集更多数据。它不是在真实环境里做在线规划,也不是每次行动都跑 CEM,而是把 planning pressure 转移到 actor training 里。
这段伪代码容易忽略的一点是:behavior learning 时 world model 是 fixed 的。actor 的梯度可以穿过 imagined trajectory 回到动作,但不更新 dynamics model。这能避免 actor 为了拿高 value 直接“篡改”世界模型。Dreamer 的核心工程分工就是:world model 用真实数据学环境,actor/critic 用 imagined trajectories 学控制。
这里最值得注意的是训练顺序:world model 先用 replay 中的真实观测序列训练;actor 和 critic 再在固定 world model 的 imagined trajectories 上训练。论文明确说,behavior learning 时 world model 是 fixed 的,这避免 actor 更新直接改写 dynamics。
World Model 训练
Dreamer 使用的 latent dynamics 和 PlaNet 一脉相承,核心是 RSSM。论文把 world model 拆成三个基础组件:
训练阶段 representation model 可以看到真实观测 ,得到当前 latent state;imagination 阶段没有未来观测,只能用 transition model 根据 往前预测。这个约束和 PlaNet 相同,也是 world model 能否用于控制的关键。
Reconstruction Objective
论文默认使用 pixel reconstruction 训练 world model。此时还会加入 observation model:
训练目标可以理解为三项:
| Term | Objective | Role |
|---|---|---|
| 让 latent state 保留可重建观测的信息 | ||
| 让 latent state 包含决策相关 reward 信息 | ||
| 让 transition prior 能预测 posterior latent |
也就是:
这不是为了部署时生成视频,而是为了给 latent state 一个密集训练信号。如果只预测 reward,稀疏奖励任务里的监督太弱,模型可能学不到那些暂时不产生 reward、但未来会影响控制的视觉因素。
Contrastive Objective 与 Reward-only
论文还比较了三种 representation learning 目标:
| World model objective | 训练信号 | 论文实验结论 |
|---|---|---|
Dreamer + Reconstruction |
image reconstruction + reward + KL | 大多数任务表现最好 |
Dreamer + Contrastive |
state model + NCE + reward + KL | 能解决约一半任务,但整体弱于 reconstruction |
Dreamer + Reward only |
reward prediction + KL | 在论文实验中不够 |
contrastive 目标的动机是避免像素预测占用太多模型容量。它用 state model 代替 observation decoder,并通过 batch 内负样本估计 state marginal,形式上接近 InfoNCE:
这部分非常重要,因为它说明 Dreamer 的算法本身不绑定 pixel decoder;只要 world model 能产生可 rollout 的 latent states 和 rewards,actor-critic 部分可以接上不同 representation learning objective。只是在这篇论文的实验条件下,pixel reconstruction 仍是最稳定的选择。
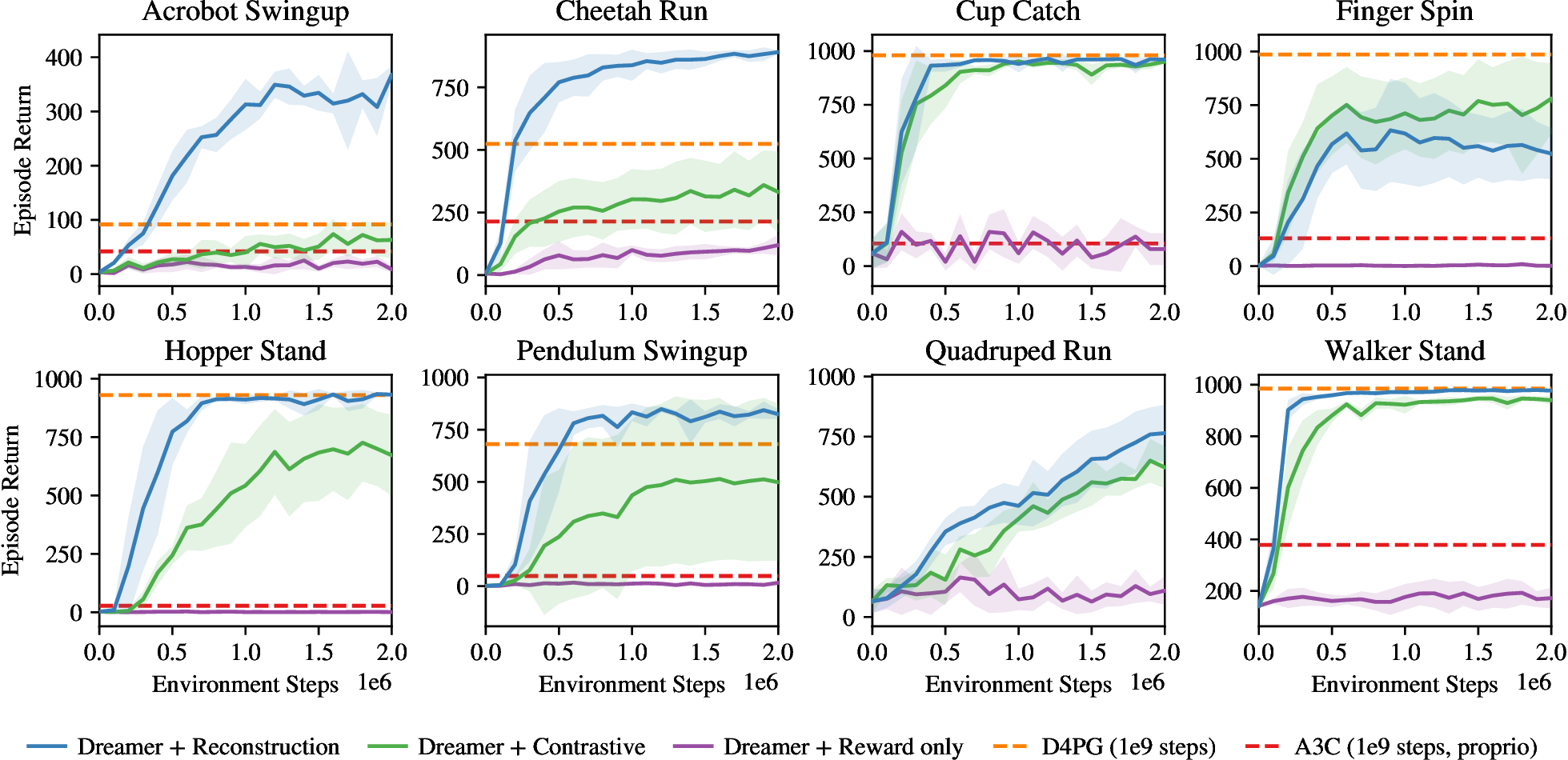
Figure source: Dream to Control, Figure 8. 原论文图注要点:该图比较 Dreamer 使用不同 representation learning objectives 的表现;pixel reconstruction 在多数任务上最好,contrastive objective 约能解决一半任务,而只预测 reward 在实验中不足。
具体训练超参
论文给出的实现细节很有工程参考价值。
| Detail | Value |
|---|---|
| Encoder / decoder | convolutional encoder and decoder networks from World Models |
| Dynamics | RSSM from PlaNet |
| Other functions | 3 dense layers of size 300 with ELU activations |
| Latent distribution | 30-dimensional diagonal Gaussians |
| World model learning rate | |
| Action model learning rate | |
| Value model learning rate | |
| Batch size | 50 sequences |
| Sequence length | 50 |
| Gradient clipping | scale down gradient norms that exceed 100 |
| KL regularizer | , clipped below 3 free nats |
| Imagination horizon | for continuous control |
| Return parameters | |
| Seed dataset | random episodes |
| Collection schedule | 100 training steps, then collect 1 episode |
| Exploration noise | |
| Action repeat | across tasks |
论文还明确提到几个“没有使用”的设计:latent overshooting、action model entropy bonus、value target networks 在这里都不是必要的。这个信息很有用,因为它说明 Dreamer 的核心提升不是靠更复杂的 world model 正则,而是靠把 behavior learning 改成 latent actor-critic。
Behavior Learning
Dreamer 的行为学习发生在 latent space。imagined trajectory 从 replay 序列编码出的真实 model state 出发,然后循环:
这里的 是 imagination time index,不是真实环境时间。actor 和 critic 都只看 latent state:
连续控制中,action model 输出 tanh-transformed Gaussian。均值由网络预测后乘以 5,标准差通过 softplus 得到,然后再经过 tanh 变换:
这个 reparameterization 很关键。它让 sampled action 可以看成网络输出的可微函数,从而允许梯度从 value estimates 反向穿过 action、transition、reward 和 future value。
-return
Dreamer 不是只最大化 horizon 内 reward,而是用 learned value model 做 bootstrap。论文比较了三种 value estimates:
直觉上, 只看 horizon 内 reward,bias 低但非常短视; 用 value model 估计 步之后的收益; 把不同 的估计做指数加权,平衡 bias 和 variance。
Actor 与 Critic 更新
value model 回归 stop-gradient 后的 -return target:
action model 则最大化 imagined states 上的 value estimates:
关键区别在于 actor 梯度不是从真实环境采样得到的 policy gradient,而是 analytic gradients through learned dynamics。因为 transition、reward、value 和 action model 都是神经网络,Dreamer 可以通过 stochastic backpropagation 直接计算 actor 参数对 multi-step value estimates 的影响。
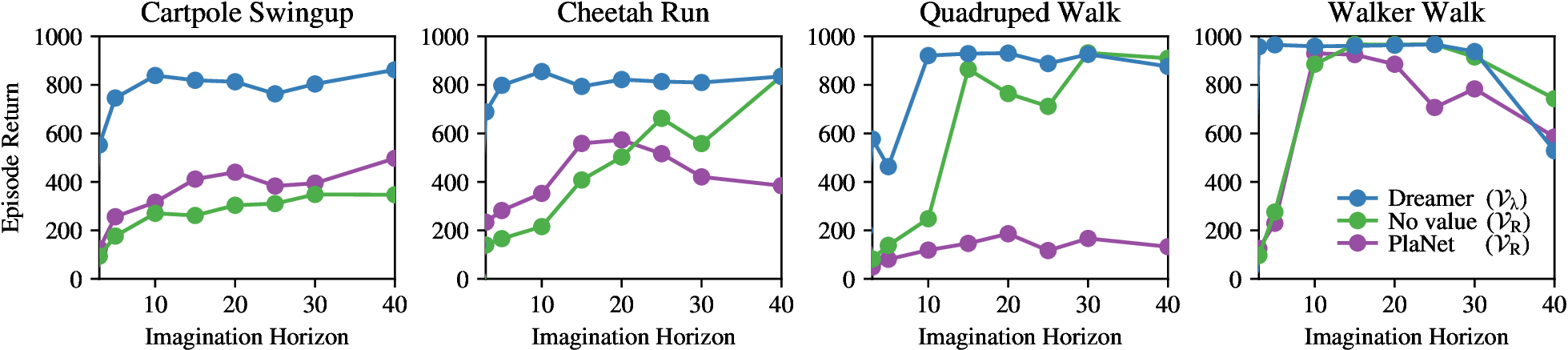
Figure source: Dream to Control, Figure 4. 原论文图注要点:该图比较 Dreamer、没有 value prediction 的 action model、以及 PlaNet online planning 在不同 imagination horizon 下的最终表现;value model 能估计 horizon 之后的 reward,使 Dreamer 对 horizon length 更鲁棒。
Figure 4 支持了 Dreamer 的核心论点:只优化 horizon 内 imagined rewards 容易短视;引入 value model 后,即使 horizon 不长,也能学习需要长期信用分配的行为。
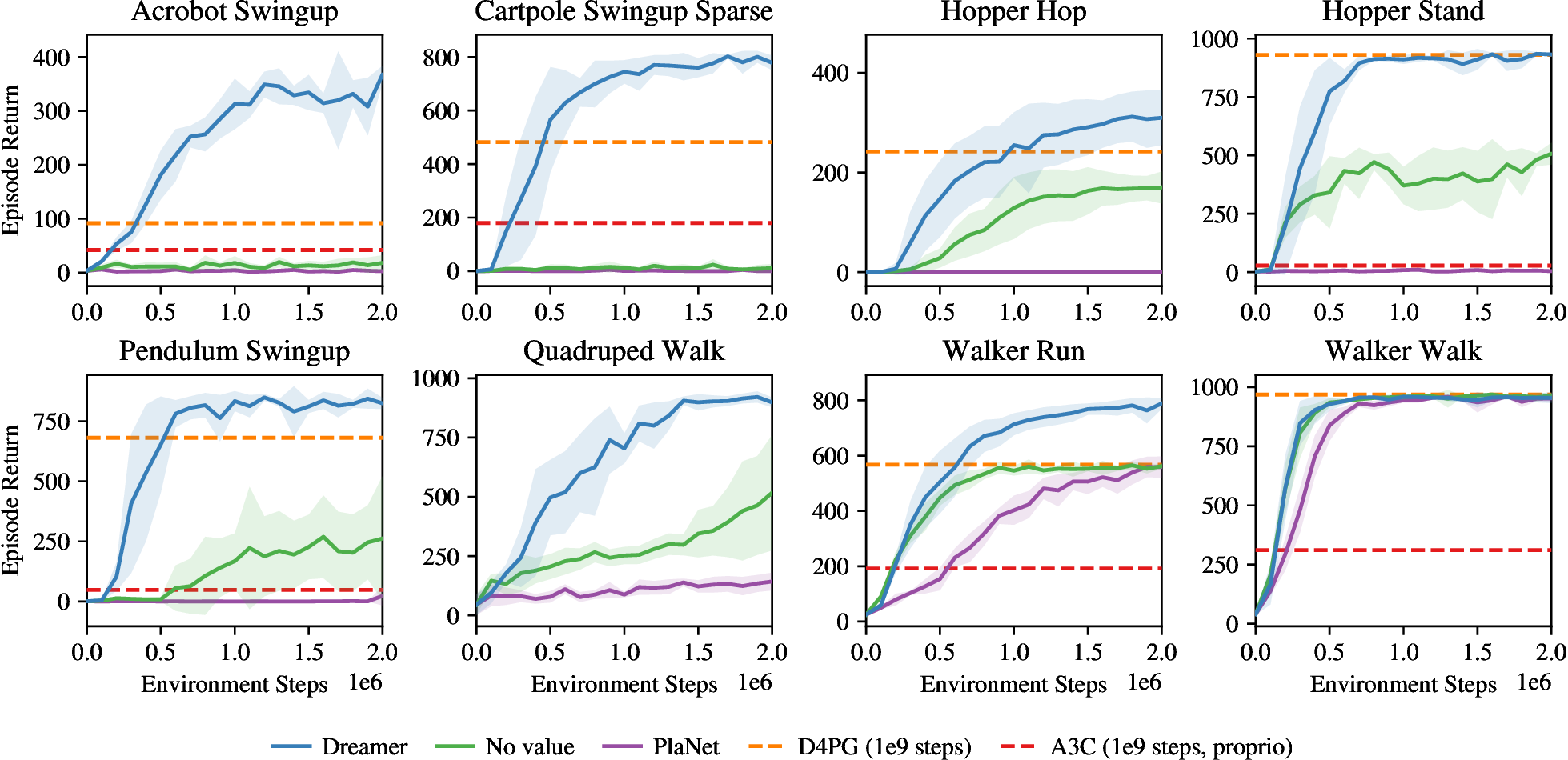
Figure source: Dream to Control, Figure 7. 原论文图注要点:Dreamer 能解决需要 long-horizon credit assignment 的视觉控制任务,例如 acrobot 和 hopper;只优化 horizon 内 imagined rewards 的 action model 或在线规划更容易产生短视行为,而在 walker 这类反应式任务中更容易成功。
离散动作与 Early Termination
Dreamer 主要实验是连续控制,但论文也补充了离散动作和 early termination 的设置。这里有几个训练细节值得记住:
| Setting | Detail |
|---|---|
| Discrete action model | predicts logits of a categorical distribution |
| Gradient estimator | straight-through gradients during latent imagination |
| Exploration | epsilon greedy, linearly scheduled from 0.4 to 0.1 over first 200,000 gradient steps |
| Imagination horizon | |
| KL scale | |
| Rewards | bounded using tanh |
| Termination | predict discount factor from latent state with a binary classifier trained toward soft labels 0 and |
这说明 Dreamer 的 latent imagination 不是只能处理连续控制。只要 action sampling 能给 actor 提供可用梯度,离散动作也可以通过 straight-through estimator 接入同一套框架。early termination 则通过预测 discount factor,把 imagined trajectory 中已经可能终止的步权重降下来。
实验结论
论文在 DeepMind Control Suite 的 20 个视觉控制任务上评估 Dreamer。输入是 图像,动作维度从 1 到 12,reward 范围为 0 到 1,episode 长度 1000,action repeat 固定为 。
论文先用 open-loop prediction 检查 RSSM 是否能做长程视觉预测。
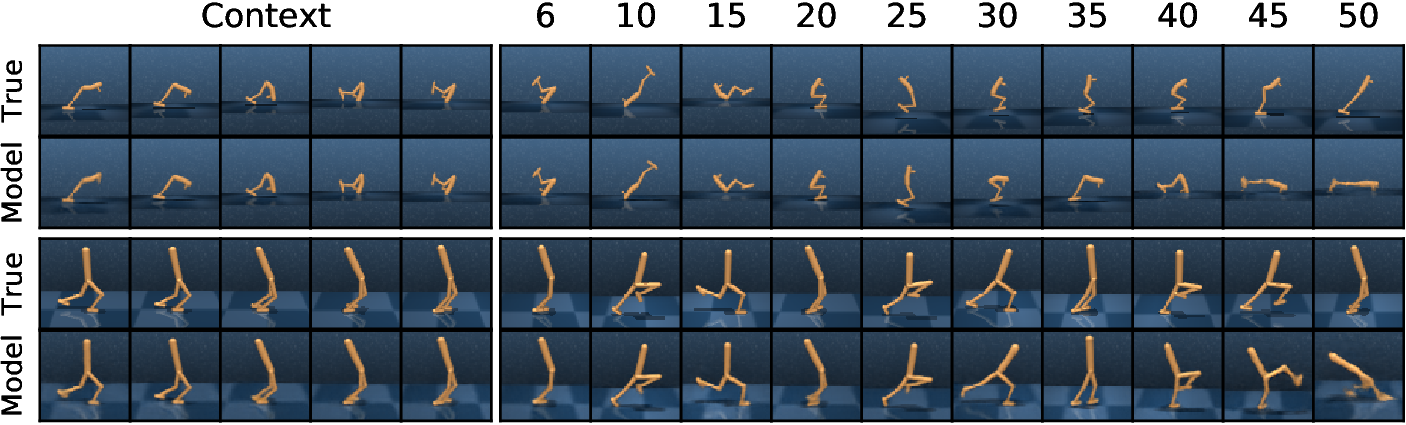
Figure source: Dream to Control, Figure 5. 原论文图注要点:模型先用 representation model 处理 hold-out trajectories 的前 5 帧,然后只给动作、用 latent dynamics 向前预测 45 步;RSSM 能做较准确的长程预测,使 Dreamer 可以在 compact latent space 中学习行为。
这张图的意义和 PlaNet 类似:它不是为了证明 Dreamer 是视频生成模型,而是为了诊断 latent dynamics 是否能在没有未来观测的情况下继续 rollout。
主要性能对比如下。
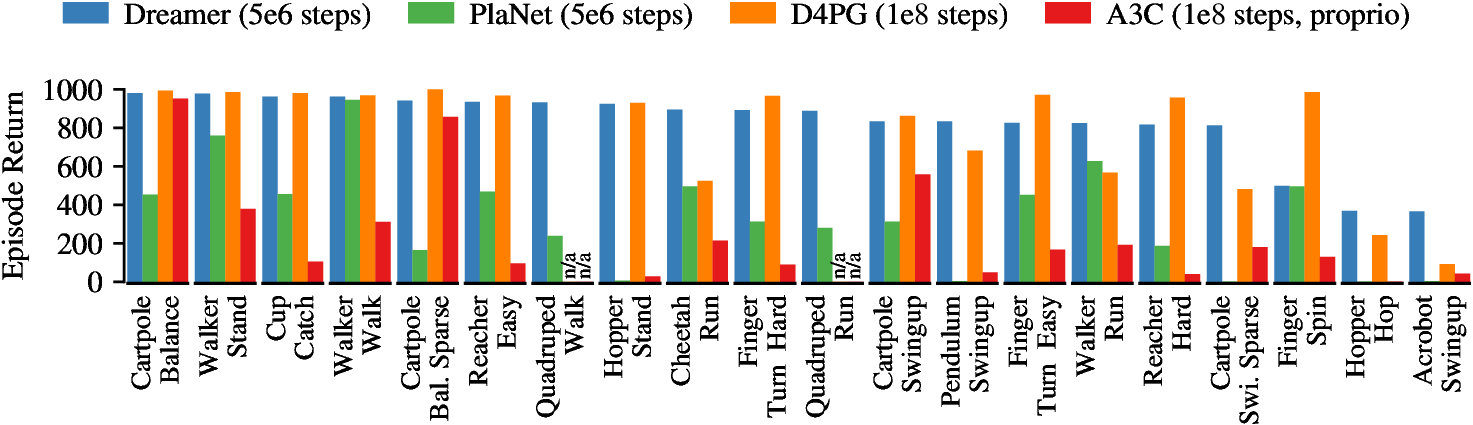
Figure source: Dream to Control, Figure 6. 原论文图注要点:Dreamer 继承 PlaNet 的数据效率,同时超过最佳 model-free agents 的渐近表现;在 environment steps 后,Dreamer 平均分 823,PlaNet 为 332,而 D4PG 在 steps 后为 786,结果为 5 个 seeds 的平均。
从实验数字看,Dreamer 的贡献有三层:
- 相比 D4PG,Dreamer 用 environment steps 达到 823 平均分,而 D4PG 用 steps 达到 786;
- 相比 PlaNet,Dreamer 在相同 steps 下平均分 823,而 PlaNet 为 332;
- 计算时间上,论文报告 Dreamer 在 Control Suite 上约 3 hours per environment steps,PlaNet online planning 约 11 hours,D4PG 达到类似表现约 24 hours。
Appendix 中的 continuous control scores 如下。字段和值保持论文原格式。
| A3C | D4PG | PlaNet | Dreamer | |
|---|---|---|---|---|
| Input modality | proprio | pixels | pixels | pixels |
| Environment steps | ||||
| Acrobot Swingup | 41.90 | 91.70 | 3.21 | 365.26 |
| Cartpole Balance | 951.60 | 992.80 | 452.56 | 979.56 |
| Cartpole Balance Sparse | 857.40 | 1000.00 | 164.74 | 941.84 |
| Cartpole Swingup | 558.40 | 862.00 | 312.56 | 833.66 |
| Cartpole Swingup Sparse | 179.80 | 482.00 | 0.64 | 812.22 |
| Cheetah Run | 213.90 | 523.80 | 496.12 | 894.56 |
| Cup Catch | 104.70 | 980.50 | 455.98 | 962.48 |
| Finger Spin | 129.40 | 985.70 | 495.25 | 498.88 |
| Finger Turn Easy | 167.30 | 971.40 | 451.22 | 825.86 |
| Finger Turn Hard | 88.70 | 966.00 | 312.55 | 891.38 |
| Hopper Hop | 0.50 | 242.00 | 0.37 | 368.97 |
| Hopper Stand | 27.90 | 929.90 | 5.96 | 923.72 |
| Pendulum Swingup | 48.60 | 680.90 | 3.27 | 833.00 |
| Quadruped Run | - | - | 280.45 | 888.39 |
| Quadruped Walk | - | - | 238.90 | 931.61 |
| Reacher Easy | 95.60 | 967.40 | 468.50 | 935.08 |
| Reacher Hard | 39.70 | 957.10 | 187.02 | 817.05 |
| Walker Run | 191.80 | 567.20 | 626.25 | 824.67 |
| Walker Stand | 378.40 | 985.20 | 759.19 | 977.99 |
| Walker Walk | 311.00 | 968.30 | 944.70 | 961.67 |
| Average | 243.70 | 786.32 | 332.97 | 823.39 |
这张表最重要的不是 Dreamer 每个任务都最高,而是它在少 20 倍环境步数的条件下,整体平均超过 D4PG,并显著超过同样使用 world model 的 PlaNet。也就是说,Dreamer 保留了 model-based RL 的数据效率,同时把 action selection 从昂贵 online planning 迁移到 amortized actor。
和视频世界模型路线的关系
Dreamer 会重建图像,也会展示 open-loop video predictions,但它不是视频生成型世界模型。它和 LingBot-World 这类路线的区别在于:
| 维度 | Dreamer | 视频生成型世界模型 |
|---|---|---|
| 数据 | agent interaction trajectories: observation, action, reward | 大规模视频、图文视频、相机轨迹、动作或交互信号 |
| 核心状态 | compact latent state | video latent 或帧级 latent |
| 训练目标 | latent dynamics、reward prediction、representation learning | future video generation、action-conditioned video rollout |
| 行为接口 | action model | 通常还需要额外 planner 或 policy |
| 主要输出 | 动作、value、latent rollout | 未来视频或可交互视觉场景 |
所以 Dreamer 里的 action 不是最终解释视频的附加标签,而是 world model transition 的核心条件变量。模型训练的目标是:
而不是:
这也是为什么 Dreamer 更接近 model-based RL 世界模型路线,而不是 video-generation-based world simulator 路线。
局限与后续影响
Dreamer 的局限也比较清楚。
- 视觉复杂度有限。论文主要成功集中在 DeepMind Control Suite 的低分辨率视觉控制任务;Atari 和 DMLab 只是证明适用性,还不是全面竞争。
- representation learning 仍是瓶颈。Figure 8 显示 reconstruction 明显好于 contrastive 和 reward-only,说明当时的 latent representation 对图像重建信号依赖较强。
- learned dynamics 仍可能被 actor exploit。actor 通过 world model 梯度优化,如果 model bias 存在系统漏洞,policy 可能学到只在模型里有效的行为。
- 对训练稳定性和超参仍敏感。Dreamer 使用同一组连续控制超参,但还没有 DreamerV3 那种跨域固定超参鲁棒性。
- 它不是开放世界模拟器。Dreamer 的目标是控制收益,不是高保真开放场景生成。
从后续发展看,Dreamer 的贡献非常明确:它把 PlaNet 的 RSSM world model 接到了 latent actor-critic 上,证明 imagined rollout 不只可以用于在线 planning,也可以高效训练 policy。DreamerV2、DreamerV3 后续主要是在这个基础上提升离散 latent、任务范围、鲁棒性和超参迁移。
阅读结论
Dreamer 最值得记住的是三点:
- world model 学的是 action-conditioned latent dynamics,而不是单纯视频预测;
- behavior learning 不再依赖 CEM online planning,而是在 latent imagination 中训练 actor 和 critic;
- value model 是解决有限 imagination horizon 短视问题的关键。
一句话总结:Dreamer 是交互轨迹型世界模型路线从“会模拟、会规划”走向“会在模拟中训练策略”的关键论文。它把 RSSM latent world model 变成了一个可微的 imagination environment,并用 analytic value gradients 在里面学习长视野控制行为。
- Title: 论文专题讲解:Dreamer:Latent Imagination 控制
- Author: Charles
- Created at : 2025-12-04 09:00:00
- Updated at : 2025-12-04 09:00:00
- Link: https://charles2530.github.io/2025/12/04/ai-files-paper-deep-dives-world-models-dreamer/
- License: This work is licensed under CC BY-NC-SA 4.0.