
VLM/VLA:视觉 Tokenizer 与连接器:视觉证据怎样被压成可用 token
VLM/VLA 的第一道瓶颈不是语言模型多大,而是视觉证据怎样进入后续模型。图片、视频、多相机、深度、点云和机器人 proprioception 都不能原样无限塞进上下文;它们必须先被切成 token、压成 latent,或者通过 query / cross-attention 被抽取成少量证据。
这页只回答一个问题:视觉 tokenizer 和 connector 在压缩什么,丢掉什么,以及这些丢失为什么会影响问答、动作和世界模型 rollout。
视觉 token 先来自空间切块
ViT 把图像当成一串 patch token。假设输入图像大小是 ,patch size 是 ,一帧图像会变成:
这里 表示视觉 encoder 看到的 patch 数。若 图像用 patch,就得到 个 patch token;若分辨率升到 ,同样 patch size 下就变成 个 token。
这就是视觉 tokenizer 的第一层含义:它不是“把图像变成一个向量”,而是把图像变成一串有空间位置的局部证据。patch 越细,小字、边缘、按钮、夹爪和接触点越可能保留;token 越多,后续 attention、KV cache、激活和通信成本越高。
文本 token 和视觉 token 的差别在这里很关键。一个句子少几个 token,语义可能仍然靠上下文补回来;视觉少几个局部 token,可能就是杯沿、按钮边界或遮挡前位置不见了。
多相机视频会把 token 数迅速放大
一帧还好,多帧和多相机会把视觉长度乘起来。若 路相机、 帧历史,每帧 个 patch token,原始视觉长度是:
这行式子表示:相机数、历史帧数和每帧 patch 数相乘,才是进入连接器前的视觉 token 量。一个桌面机器人若使用 4 路相机、16 帧历史,每帧 个 patch,就有:
也就是说,仅视觉侧就有 12,544 个 token。还没算语言指令、动作 token、proprioception、memory token 和未来预测 token。
如果 connector 把每个相机每帧压成 个任务 token,压缩后长度变成:
当 时:
视觉长度约下降 倍。如果后续模块对视觉 token 做全局 self-attention,attention score 的理论上界会从 个元素降到 ,大约 37 倍。FlashAttention 不会把 score 全量写回内存,但计算压力和上下文预算仍然受 或 影响。
所以 connector 不是装饰层。它决定一个多相机长视频系统是能训练,还是只停留在 demo。
连接器不是格式转换,而是选择证据
现代 VLM 通常有三段:
这里 是图像或视频, 是视觉 encoder 输出的大量 patch / frame features, 是 connector 交给后续模型的视觉证据, 是语言回答, 是动作, 是预测状态。公式想表达的不是某个固定架构,而是一条信息链:后续模型从来没有直接读原图,它读的是已经被筛选后的 。
最小 connector 可以写成:
这里 是 connector, 可以是可学习 query、语言 token、policy token 或 resampler latent。若 很少,token 成本低,但信息选择压力大;若 很多,细节更容易保留,但长上下文成本会上升。
这就是为什么同一个视觉 encoder,换不同 connector 后表现会变。模型不是“看见了整张图再思考”,而是“看见 connector 允许它看见的证据再思考”。
BLIP-2:Q-Former 把视觉证据压成 query token
BLIP-2 是连接器瓶颈的好例子。它冻结强视觉 encoder 和强语言模型,中间训练 Q-Former,让少量 learnable query 从视觉特征里读信息。
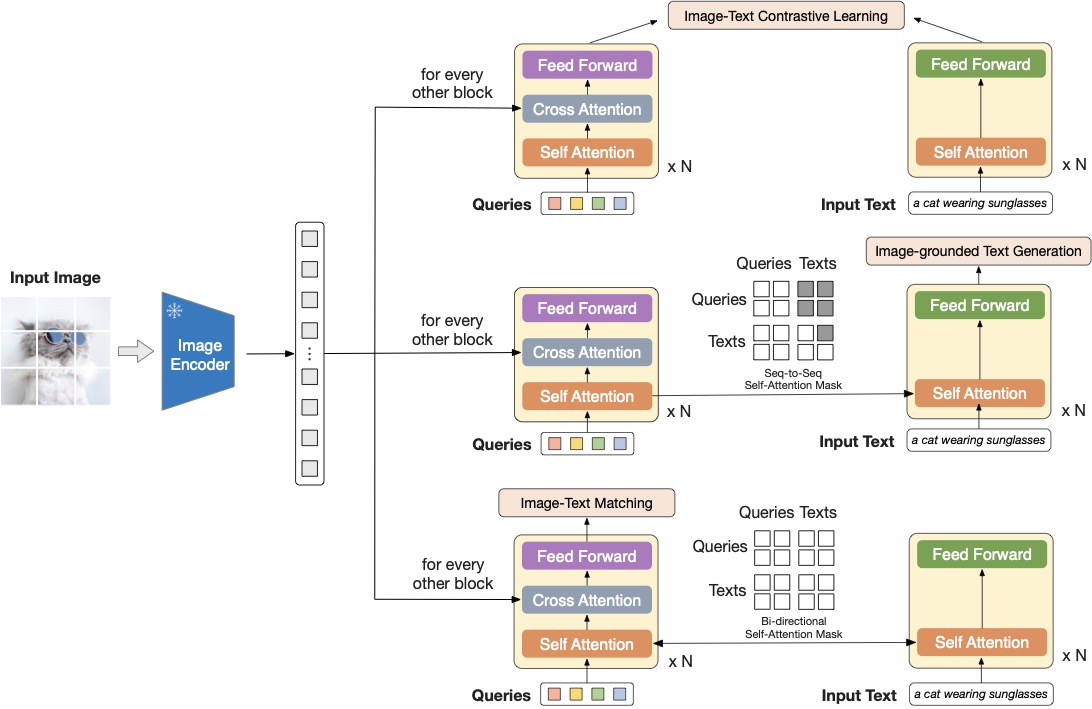
图源:BLIP-2,Figure 2。原图表达 Q-Former 用 learnable query 从冻结视觉 encoder 输出中抽取信息,并服务 image-text contrastive learning、image-grounded generation 和 image-text matching。本文用它说明:连接器是信息瓶颈,query 学到什么取决于训练目标。
读这张图时先看中间的 query tokens。它们不是普通文本 token,而是一组可训练的“视觉问题”:从海量 patch features 里问出哪些信息值得交给语言模型。训练目标如果是图文对比和 caption,query 会倾向保留类别、属性、关系和可描述细节;训练目标如果包含定位、OCR、动作或未来预测,query 才更可能保留局部几何、文字区域、接触状态和时间变化。
这解释了一个常见现象:VQA 很好的 connector,不一定适合 VLA。它可能准确知道“桌上有红色杯子”,却没有保留杯口边缘、夹爪距离、桌边风险和遮挡前位置。
三条常见接法,各自丢不同证据
| 接法 | 机制 | 优点 | 主要风险 |
|---|---|---|---|
| Linear / MLP projector | 把视觉 patch 映射到 LLM embedding | 简单、稳定、LLaVA 式路线容易落地 | token 多,局部选择能力弱,依赖指令数据弥补 |
| Q-Former / resampler | 少量 query 主动读视觉特征 | 控制 token 数,适合冻结大模型桥接 | query 数或训练目标不够时会压掉小结构 |
| Cross-attention / visual memory | 语言或策略 token 按需读视觉 memory | 细节可以在层内被访问,适合多图/视频上下文 | 系统复杂,视觉 cache、调度和显存压力高 |
Flamingo 代表 cross-attention / resampler 路线:Perceiver Resampler 把可变数量的图像或视频特征压成固定数量视觉 token,再让语言模型通过 gated cross-attention 读取。LLaVA 代表简单 projector 路线:CLIP vision encoder 加 projector,再用视觉指令数据把视觉 token 接到 LLM。两条路线都能做 VLM,但失败模式不同:前者工程复杂,后者更容易把视觉证据一次性压死。
Perceiver 和 TokenLearner 这类工作提供了更一般的直觉:面对高维视觉输入,模型可以用少量 latent / learned tokens 主动抽取信息,而不是把所有 token 逐层保留。压缩不等于平均池化,好的压缩应该让 token 对任务有选择性。
为什么“省 token”不等于“保留状态”
把 12,544 个视觉 token 压成 2,048 个,成本显著下降。但问题是:剩下的 token 到底是什么?
| 压缩策略 | token 省在哪里 | 容易保留 | 容易丢失 |
|---|---|---|---|
| 全图均匀 resampler | 每帧固定少量 latent | 场景类别、主要物体、粗位置 | 小物体、文字、接触边界 |
| 目标/夹爪优先 token | 给目标物和 wrist crop 更多预算 | 抓取点、局部边缘、夹爪关系 | 背景布局、远处约束 |
| 当前窗口 + memory token | 最近帧保细,历史压进 memory | 短期动作、长任务上下文 | memory 写错后长期污染 |
| 3D / 深度增强 token | 把几何位置显式注入视觉 token | 距离、相对位置、可达性 | 深度噪声和标定误差会变成模型输入 |
如果任务是静态图片问答,第一种可能足够。如果任务是机器人抓取,第二种或第四种通常更关键。如果任务是世界模型 rollout,第三种的 memory 写入质量会直接影响长期状态。
视觉 token 压缩最危险的地方,是它在离线指标里不一定立刻暴露。caption 仍然正确,VQA 分数也许不掉,但动作坐标会飘,遮挡后物体会丢,未来预测会把不同动作滚成相似结果。
世界模型和 VLA 要求动作敏感
VLM 的典型问题是:
给定图像 和文本 ,输出回答 。这类任务要求视觉 token 支持语言解释。
VLA 或 world model 更接近:
这里 是历史视觉证据, 是语言指令, 是动作, 是当前状态。第一行表示策略要从视觉证据中选动作;第二行表示世界模型要预测动作后的下一状态。
这两行式子说明:动作系统不仅要“看懂画面”,还要让视觉表示对候选动作敏感。同一历史下,左推、右抓、上提、noop 应该产生不同的 latent future。若 connector 把所有动作相关局部证据都压没了,后续模型会把不同动作想成差不多的未来。
怎样判断 connector 是否压坏了信息
不要只看 token compression ratio,也不要只看 VQA。更可靠的读法是把证据分成四类。
| 证据 | 证明什么 | 不证明什么 |
|---|---|---|
| Token / latency / memory 统计 | 压缩是否真的省成本 | 不证明状态还能控制 |
| VQA / caption / OCR | 语义和文字是否保留 | 不证明动作坐标和接触 |
| Grounding / coordinate error | 位置和局部证据是否保留 | 不证明多步未来 |
| Action sensitivity / closed-loop success | 视觉证据是否能服务动作和 rollout | 不证明开放世界泛化 |
一个真实排查案例通常长这样:换成更小 resampler 后,VQA 指标几乎不变,训练 step time 变好,但抓小物体偏 2-4 cm,遮挡后更容易抓空。回放 attention 或 saliency 后发现,模型保留了目标大轮廓,却压掉了 wrist crop、接触点和遮挡前位置。这个 connector 对问答是成功的,对 VLA 是失败的。
多模态报告里的 video token 数要认真读
很多技术报告会给一个看似小的数字:每帧多少视觉 token。这个数字其实非常关键。比如 Gemini 2.5 技术报告提到视频 tokenizer 更高效,每帧 token 数相比前代显著下降,从而让 1M context 能覆盖更长视频。这里的能力提升不只是“模型更大”,而是 video tokenizer、采样率、上下文预算和推理成本一起改变了可处理的时间长度。
同理,Qwen2-VL / Qwen2.5-VL 一类模型强调动态分辨率和多模态位置编码,本质上也是在处理同一个矛盾:不同图片、文档、视频和界面截图需要不同 token 预算;如果强行固定分辨率,简单场景浪费 token,复杂场景又丢细节。
读这类报告时不要只抄 benchmark。先找三个数字:视觉 token 数、最大上下文、视频采样策略。它们决定模型到底是在“看几张图”,还是能持续跟踪一段时间里的视觉状态。
读新论文时先问五个问题
第一,视觉 token 从哪里来:ViT patch、CNN feature、VAE latent、VQ token、object token、3D token,还是多种混合?
第二,压缩发生在哪里:encoder 内部、connector、cross-attention memory、KV cache,还是 world model latent?
第三,训练目标要求保留什么:caption、contrastive alignment、OCR、grounding、动作、reward、future prediction,还是 closed-loop success?
第四,后续模型怎样消费:LLM 一次性读视觉 token,还是每层 cross-attention 按需读 memory;policy 是直接读 token,还是先进入 state estimator?
第五,失败证据有没有公开:小物体、遮挡、文字、坐标、接触、动作分叉、长视频记忆分别有没有 ablation?
视觉 tokenizer 决定原始视觉证据怎样被切开,connector 决定哪些证据能穿过瓶颈进入 LLM、policy 或 world model。ViT 说明视觉 token 从 patch 来,Perceiver / TokenLearner 说明少量 latent 可以主动抽取信息,BLIP-2 说明 Q-Former 是连接器瓶颈,Flamingo 和 LLaVA 展示了 cross-attention 与 projector 两条常见路线。
真正要记住的是:token 少只是成本收益,证据没丢才是能力收益。 对 VQA 来说,语义类别和文字可能足够;对 VLA 和世界模型来说,局部几何、接触、遮挡记忆、动作敏感性和多相机一致性才是关键。连接器一旦把这些压掉,后面的模型再大也只是基于不完整证据做推理。
继续读相邻内容时,可以接 VLM 架构:视觉证据怎样进入语言模型、VLM/VLA 与世界模型高效训练接口、VLA 数据与策略学习 和 世界模型评测与失效模式。
外部精读
- 本页来源台账:记录视觉 tokenizer、connector、图片使用和中文讲法边界。
- Vision Transformer:理解图片怎样从 patch 变成 token 序列。
- Perceiver:理解用少量 latent array 读取高维输入的通用思想。
- TokenLearner:理解图像/视频里学习少量 informative tokens 的路线。
- BLIP-2:看 Q-Former 怎样从冻结视觉特征中抽取少量 query token。
- Flamingo:理解 Perceiver Resampler 和 gated cross-attention。
- LLaVA:对照 projector + visual instruction tuning 的简单强路线。
- Hugging Face VLMs:用 vision encoder、connector、language model 三段式复盘现代 VLM。
- Octo:对照 VLA 场景里视觉 token、动作 chunk 和多机器人数据如何一起验收。
- Title: VLM/VLA:视觉 Tokenizer 与连接器:视觉证据怎样被压成可用 token
- Author: Charles
- Created at : 2026-02-25 09:00:00
- Updated at : 2026-02-25 09:00:00
- Link: https://charles2530.github.io/2026/02/25/ai-files-vlm-visual-tokenizers-and-connectors/
- License: This work is licensed under CC BY-NC-SA 4.0.