
世界模型:RSSM、Dreamer 与规划:世界模型怎样变成控制信号
Dreamer 这条线要回答的不是“能不能预测一段未来视频”,而是:真实环境交互很贵时,能不能先学一个内部环境,再让策略在这个内部环境里练习。RSSM 是这个内部环境的状态骨架,PlaNet 用它在线搜索动作,Dreamer 用它批量想象轨迹来训练 actor-critic。
如果只记一个判断:posterior 用真实观测校正现在,prior 在没有未来观测时预测未来,planner 或 actor 只能在这个 latent future 上做决策。
为什么单帧图像不够当状态
控制问题里,“看到什么”和“处在什么状态”不是一回事。机器人相机看到杯子在桌上,但单帧图像不告诉你末端速度、刚才是否碰到杯沿、杯子是否被遮挡过;Atari 当前帧能显示球的位置,却不一定显示球的运动方向。
世界模型不能只学:
这更像一步视频预测。用于控制时,它至少要学:
是到当前为止的观测历史, 是历史动作, 是当前候选动作, 是下一步内部状态, 是奖励或任务进展, 是 continuation,表示 episode 是否继续。
白话说:模型要回答“我刚才经历了什么、现在做这个动作后世界会怎样、这个后果好不好、任务是否结束”。RSSM 的作用,就是把这件事压到一个可以 rollout 的 latent state 里。
RSSM 把记忆和不确定性分开
RSSM 全称是 Recurrent State-Space Model。它把 state 拆成两部分:
| 组成 | 作用 | 为什么需要 |
|---|---|---|
| deterministic state | 递归记住历史 latent 和动作 | 单帧看不到速度、遮挡和接触历史。 |
| stochastic state | 表达当前不确定状态 | 同一段历史下可能存在多个未来,不能全压成平均值。 |
最小递推可以写成:
第一行用上一时刻的记忆、latent 和动作更新当前记忆。第二行有两条路径:posterior 在训练时能看到真实观测 ,负责把当前图像里的证据并入 state;prior 不看当前观测,只靠历史记忆预测当前 latent,未来想象时真正往前滚的就是它。
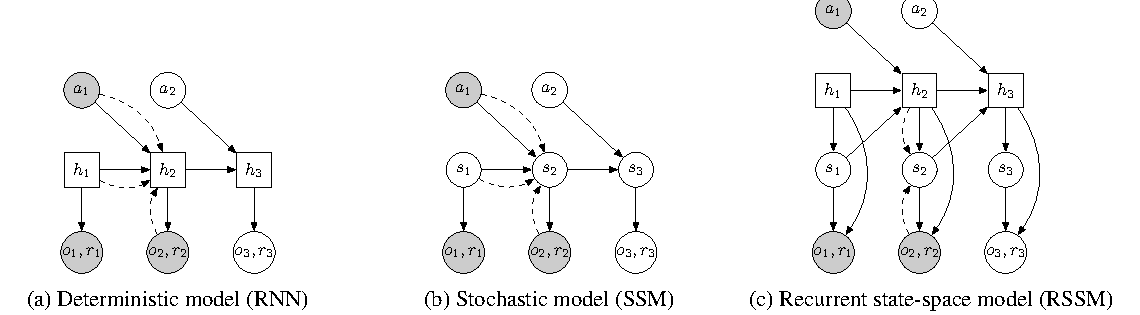
图源:Learning Latent Dynamics for Planning from Pixels,Figure 2。本站复用已有论文图,未使用 image2 生成新图。原图比较 RNN、SSM 和 RSSM 三种 latent dynamics;本站用它说明 RSSM 同时保留 deterministic history 和 stochastic latent,适合在部分可观测环境里把历史记忆、不确定性和未来 rollout 接起来。
RNN 只有确定性记忆,容易把多种可能未来压成一个平均未来。SSM 有随机状态,但缺少强历史记忆。RSSM 把两者合起来: 负责长时上下文, 负责当前不确定性。真实观测进入 posterior 校正状态;没有真实观测时,prior 自己往前滚。
prior 和 posterior 分开,是为了不偷看未来
训练时,模型拥有完整轨迹:图像、动作、奖励和终止信号都在数据里。它可以用当前真实观测 得到 posterior:
但规划和 imagined rollout 时,未来观测还没有发生。模型只能从当前 state 和动作出发,用 prior:
KL 项真正服务的是这件事:
这行式子不是“给 VAE 加一个正则”。它在逼一个不看当前图像的 prior 去追一个看过真实图像的 posterior。训练时允许 posterior 看答案,是为了把真实世界状态编码准;同时训练 prior 贴近 posterior,是为了未来想象不要刚离开真实观测就漂移。
如果 KL 太弱,posterior 可能编码很多 prior 追不上的细节,未来 rollout 一离开真实观测就崩。如果 KL 太强,posterior 又可能被压成很好预测但信息不足的 latent,reward、接触和任务物体都丢了。DreamerV2 的 KL balancing、DreamerV3 的 dynamics loss / representation loss 和 free bits,本质上都在调这个矛盾。
world model loss 训练的是可控制状态
RSSM 通常和 observation、reward、continuation 几个 head 一起训练。简化写法是:
观测项让 latent 保留环境结构,reward 项让 latent 对任务目标敏感,continuation 项让模型知道 episode 是否结束,KL 项让 prior 和 posterior 落在同一个可 rollout 的空间。
图像重建不是最终目标。重建图像是一种塑造 state 的信号,真正被 planner 或 actor 消费的是 latent transition、reward、continuation 和 value。一个世界模型可以画出模糊但对控制足够的未来;也可以画出好看的未来,却把 reward 或接触预测错。
PlaNet:每一步都在 latent 里做 MPC
PlaNet 先用 RSSM 从像素、动作和奖励轨迹中学 latent dynamics,然后每一步用 CEM 在 latent space 搜索动作序列。它没有训练一个长期 policy network,决策时不断重新规划:
1 | 当前 observation |
这就是典型 MPC:计划一个 horizon,只执行第一步。新观测回来后,先校正 belief,再重新搜索。
PlaNet 的关键不是生成未来图像,而是避免在像素空间评估每条候选动作序列。候选动作质量主要通过 latent reward prediction 判断,所以它的数据效率高,也暴露了风险:reward head 一旦错,CEM 会积极寻找这个错误。
Dreamer:把在线规划摊销成 actor
Dreamer 继承 RSSM,但不想每一步都用 CEM 搜索动作序列。它把 PlaNet 的“每次决策临时规划”改成“先在 imagination 里训练一个 actor”。执行时,actor 直接根据 latent state 输出动作。
Dreamer 的训练循环可以拆成三段:
1 | 真实环境数据 |
想象阶段从真实 posterior state 出发,但未来不再看真实图像:
第一组公式表示 actor 根据当前 latent state 选动作,并让 prior 预测下一步 latent;第二组公式表示 reward head 和 continuation head 从同一个 latent state 里读出学习信号。图像 decoder 可以把 imagined state 可视化,但 actor 训练不需要先解码成图像再判断动作好坏。
lambda return 把短想象接到长期价值
imagined rollout 不能无限长。太短,看不到延迟奖励;太长,prior dynamics 的误差会沿时间累积。Dreamer 用 value network 在 horizon 末尾 bootstrap,并用 -return 在短期 reward 和长期 value 之间折中:
, 是 world model 预测的奖励, 控制 episode 是否继续, 是折扣因子, 是 critic。 越接近 1,越相信更长 rollout;越接近 0,越早用 critic 的 value 收尾。
这行公式的直觉是:Dreamer 不要求 world model 把很远的未来都滚准,而是让短 horizon imagination 负责局部后果,再让 value 估计 horizon 之外的长期价值。效率来自内部 rollout 多、真实交互少;风险也来自同一个地方,一旦 imagined future 在关键状态上错了,actor 会把错未来当训练数据。
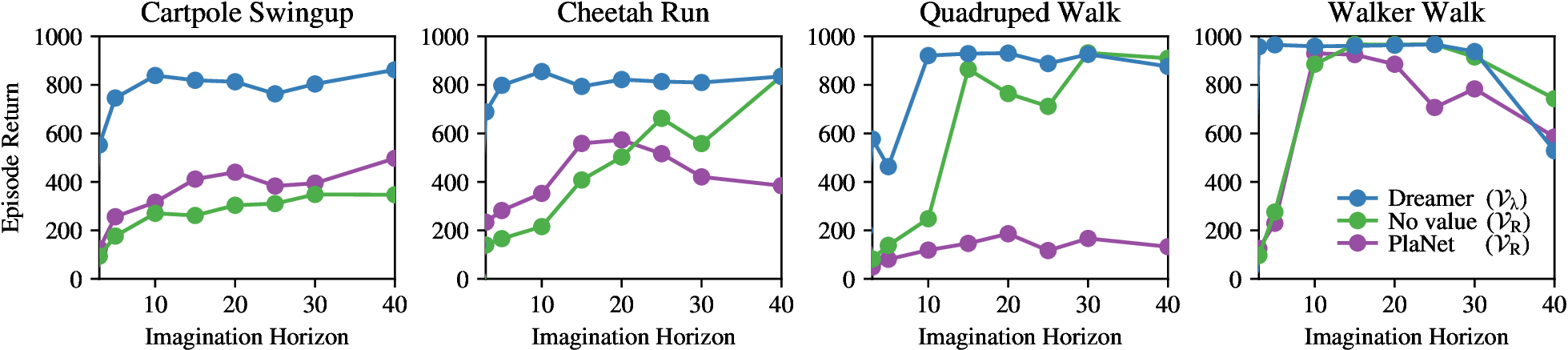
图源:Dreamer,Figure 4。本站复用已有论文图,未使用 image2 生成新图。原图展示 imagined horizon 对控制表现的影响;本站用它说明 rollout horizon 是偏差和收益的折中,太短看不到长期后果,太长会放大模型误差。
这张图比视频预测图更能解释 Dreamer 的控制逻辑。世界模型在控制里不是一个越长越好的模拟器,而是一个有限可信区间内的训练器。工程项目不能只问“能 rollout 多远”,更要问:rollout 多远之后,reward、done、接触、关键物体和风险还准不准。
DreamerV2 和 DreamerV3 改了什么
DreamerV2 把这条路线推进到 Atari,关键变化包括 discrete latent、KL balancing、面向离散动作和复杂视觉任务的 actor-critic 细节。它说明 latent world model 不只适合连续控制,也能在强离散控制基准上训练 policy。
DreamerV3 的重点不再是单个环境技巧,而是跨域稳定 recipe。它保留 RSSM 和 imagined actor-critic 的主线,但加入 symlog、symexp two-hot、free bits、return normalization 等数值稳健化设计,让同一套配置覆盖 Atari、DMLab、连续控制、Crafter、Minecraft 等任务。

图源:Mastering Diverse Domains through World Models,Figure 3(a)。本站复用已有论文图,未使用 image2 生成新图。原图展示 DreamerV3 world model learning:观测被编码成离散 latent representation,recurrent dynamics 在动作条件下预测未来 latent;本站用它说明 DreamerV3 的稳定化技巧仍服务同一目标,让 prior、posterior、reward、continuation 和 reconstruction 在不同任务尺度下共同塑造可决策 state。
这里最值得学的是设计重心的变化:PlaNet 证明 RSSM 能规划,Dreamer 证明 latent imagination 能训练 actor,DreamerV2 证明 discrete world model 能打 Atari,DreamerV3 证明这套 recipe 可以更少依赖单任务调参。
每篇论文承担一个问题
| 论文 / 项目 | 它回答的问题 | 对本文主线的作用 |
|---|---|---|
| World Models | 能否用 VAE + RNN + controller 建立 latent dream 的直觉 | 给“在内部模型里练习”提供早期概念入口。 |
| PlaNet | 能否从像素学 RSSM,再用 CEM 在 latent space 规划 | 奠定 RSSM 和 latent MPC。 |
| Dreamer | 能否不每步搜索,而在 imagination 里训练 actor-critic | 把规划摊销成 policy。 |
| DreamerV2 | world model 能否在 Atari 这种强离散基准上训练行为 | 引入 discrete latent 和 KL balancing 经验。 |
| DayDreamer | Dreamer 能否直接在真实机器人上在线学习 | 说明路线能离开仿真,但真实硬件仍有安全和数据约束。 |
| DreamerV3 | 能否用同一套配置跨很多任务稳定工作 | 把 Dreamer 系列升级成更通用的 model-based RL recipe。 |
| MuZero | 不重建图像,只学 reward/value/policy 相关 dynamics 是否可行 | 对比“任务特定 latent dynamics”和 Dreamer 的图像重建路线。 |
这个表的用法不是背年份,而是看接口:有的论文在问 state 怎么学,有的在问 action 怎么选,有的在问 policy 怎么从 imagined future 更新,有的在问真实机器人能不能承受在线试错。
和视频世界模型、VLA 的边界
Dreamer-style world model 优先学习:
视频世界模型更常见的问题是:
前者关心可训练策略的内部动力学,后者关心可视未来是否连贯。两者可以互相启发,但证据不能混用:好看的 open-loop 视频不证明 policy 能闭环成功;高回报 RL benchmark 也不证明模型能生成可检查的真实世界视频。
VLA 又多一层接口。Dreamer 的动作通常来自环境定义的连续或离散 action space;真实机器人还要处理相机外参、控制频率、动作限幅、力控、碰撞、失败恢复和安全停止。DayDreamer 说明 Dreamer 可以直接用于多种真实机器人在线学习,但这仍然是受控任务和硬件设置下的证据,不能自动外推成开放家庭机器人已经解决。
判断一篇世界模型论文是否讲清楚
读新的世界模型论文时,先画五张账本:
| 账本 | 要问的问题 |
|---|---|
| state | state 是像素、token、latent vector、RSSM state,还是显式 3D / object state?是否包含历史、动作和不确定性? |
| dynamics | 模型预测 、图像、reward、done、risk 中的哪些量?是 action-free video prediction,还是 action-conditioned rollout? |
| consumption | 未来被谁消费?CEM / MPC、actor-critic、value search、VLA policy、risk checker,还是只做人类可视化? |
| horizon | rollout 多远?多远之后误差开始污染 reward、done、接触和目标物体?是否有 value bootstrap 或不确定性门控? |
| evidence | 论文给的是 reconstruction、open-loop prediction、benchmark return、real robot success、ablation,还是失败案例? |
这五张账能防止把“视频预测好看”“latent 表示强”“控制回报高”混成同一种证据。世界模型最终要服务决策,证据也必须沿着状态、动作、rollout、消费方和闭环结果一路追下去。
最后判断
RSSM / Dreamer 这条线的知识含量在三点。第一,posterior 和 prior 分工清楚:posterior 用真实观测校正当前 state,prior 才是在未来想象中使用的 dynamics。第二,world model loss 不只是图像重建,而是观测、奖励、continuation 和 KL 一起塑造可控制的 latent state。第三,PlaNet 和 Dreamer 的差别不是有没有世界模型,而是世界模型被怎么消费:PlaNet 用它在线搜索动作,Dreamer 用它训练一个能快速执行的 actor。
这条路线的价值在于减少真实试错,把策略学习从昂贵环境转移到便宜 latent rollout。它的边界也很清楚:model bias 会被 planner 或 actor 放大,视频预测不能替代闭环回报,真实机器人还要额外面对延迟、接触、不可逆失败和安全约束。
继续往下读,可以接 Masked / JEPA 与潜变量预测、WM / WAM / VAM:动作条件建模 和 世界模型评测与失效模式。
外部精读
- PlaNet project page:先看 latent dynamics、CEM planning 和 planning from pixels 的整体直觉。
- PlaNet paper:重点读 RSSM、latent overshooting 和 CEM planning。
- Dreamer project page:理解 latent imagination 如何训练 actor/value。
- Google Research: Introducing Dreamer:官方博客把 PlaNet 和 Dreamer 的差别讲得很清楚。
- DreamerV2:重点看 discrete latent、KL balancing 和 Atari 证据。
- DreamerV3:重点看固定配置跨域、Minecraft diamond 和 scaling。
- DayDreamer:看 Dreamer 路线进入真实机器人时增加了哪些实际约束。
- Title: 世界模型:RSSM、Dreamer 与规划:世界模型怎样变成控制信号
- Author: Charles
- Created at : 2026-03-14 09:00:00
- Updated at : 2026-03-14 09:00:00
- Link: https://charles2530.github.io/2026/03/14/ai-files-world-models-rssm-dreamer-and-planning/
- License: This work is licensed under CC BY-NC-SA 4.0.