
论文专题讲解:Emu3.5:原生多模态模型如何变成世界学习器
| Checked Date | Repro Status | 本页证据口径 |
|---|---|---|
| 2026-06-02 | Author code / model release reported | 以 arXiv HTML、官方仓库与论文图表为主;world exploration、long-horizon generation、embodied manipulation 按生成式 next-state evidence 解读。 |
Emu3.5 是四篇里最直接把 unified multimodal model 称为 world model 的论文。它的关键判断是:如果模型在大规模长视频帧和 transcript 交错序列上做端到端 next-token prediction,它学到的就不只是图文映射,而是跨视觉和语言的下一状态预测。
先用一个交互场景理解它的野心和边界。用户给模型一张房间图片,然后连续说“向前走”“向左看”“把桌上的杯子拿起来”。Emu3.5 试图生成接下来会看到的画面、文字说明、子任务步骤和关键状态图。它确实在做一种视觉语言 next-state generation:同一段历史换一个指令,后续画面和叙述应该变。但这还不是机器人闭环控制,因为它没有真实传感器反馈、碰撞检查、低层轨迹、夹爪力控和失败恢复。
所以读 Emu3.5 要分清两层 claim:强 claim 是“长视频 + transcript + 世界任务 SFT 能让统一模型生成更长时序的世界状态”;弱证据边界是“生成关键帧和探索过程还不能证明真实物理执行成功”。
论文信息
| 维度 | 贡献 |
|---|---|
| 节省的成本 | 用统一 next-token prediction 建模视觉与语言,推理时再用 DiDA 把图像 token 逐 token 解码改成并行预测 |
| 核心机制 | 32B decoder-only backbone、离散视觉 tokenizer、13T pretraining、150B SFT samples、multi-task RL、DiDA hybrid inference |
| 对世界模型主线的意义 | 把 internet video 的 sequential frames + transcripts 变成视觉语言 next-state prediction 训练信号 |
| 主要风险 | 世界探索和 embodied manipulation 多为生成式 keyframe / interleaved output,不能直接等同真实动作控制 |
| 应接到本站哪里 | BAGEL、LingBot-World、VLA 数据、模型与评测路线 |
论文位置
前一代 unified models 常把图像生成、图像理解和文本生成作为并列任务。Emu3.5 更进一步,把长视频里的帧和 transcript 组织成长时序数据,让模型在视觉和语言之间预测下一状态。
这带来两个变化:
| 旧读法 | Emu3.5 的读法 |
|---|---|
| 图像是单次输入或输出 | 图像帧是长序列世界状态的一部分 |
| 文字主要是 prompt 或 answer | transcript、instruction、CoT 和 subtask text 都是状态转移条件 |
| 生成质量是核心指标 | 长时一致、交互探索、任务分解和 keyframe prediction 也进入目标 |
| 视觉 token 解码逐 token 很慢 | 训练仍用 NTP,推理用 DiDA 并行化视觉 token |
核心问题
| Question | Emu3.5 的回答 | 证据边界 |
|---|---|---|
| native multimodal NTP 能否学世界状态? | 把视频帧、transcript、instruction 和视觉 token 都作为统一序列预测下一 token | 支撑 next-state generation,不等同低层物理状态估计 |
| 长视频数据是否是关键? | 13T+ pretraining 里大量使用 sequential video frames + transcripts | 说明视频可提供世界流,但不能证明动作因果 |
| 后训练如何显式世界化? | SFT 设置 World Exploration、Visual Guidance、Embodied Manipulation 等任务 | 更接近规划和 keyframe proposal,不是闭环控制 |
| 推理延迟如何处理? | DiDA 把视觉块改成并行预测,论文报告 per-image 约 20x 加速 | 加速视觉输出,不保证状态预测更正确 |
方法结构
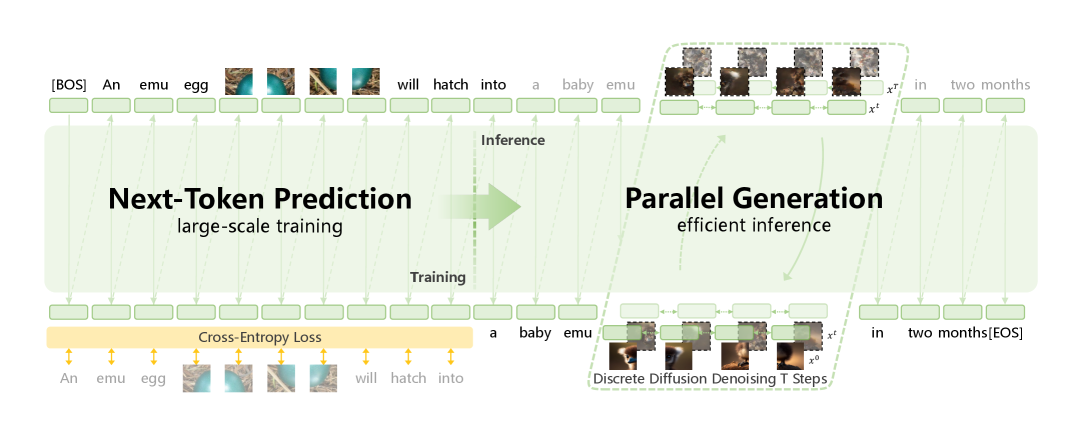
图源:Emu3.5: Native Multimodal Models are World Learners,Figure 3。原论文图意:Emu3.5 在大规模训练中用统一 next-token prediction;推理时通过 Discrete Diffusion Adaptation 加速单图视觉 token 生成。
Emu3.5 架构图要分清训练目标和解码方式。
左侧是训练逻辑:文本 token 和视觉 token 都进入 decoder-only Transformer,用标准 next-token prediction 学习下一状态。右侧是推理逻辑:文本仍然适合自回归,但图像 token 数量太大,逐 token 生成成本高,所以 DiDA 把视觉块改成 bidirectional parallel generation。
对世界模型来说,这张图的核心是“训练目标统一,推理解码分工”。统一目标给模型一个共同状态空间;推理阶段再按模态特性优化成本。
模型配置与视觉 token
| Item | Emu3.5 |
|---|---|
| Parameters | 34.1B total |
| Transformer layers | 64 |
| Hidden size | 5120 |
| Intermediate size | 25600 |
| Attention heads | 64 Q heads / 8 KV heads |
| Vocabulary | 282,926 tokens |
| Text vocabulary | 151,854 tokens |
| Vision vocabulary | 131,072 tokens |
| Context length | 32,768 tokens |
表源:Emu3.5,Table 1。表格保留原论文英文配置名并压缩为站内读法。
视觉 tokenizer 使用离散视觉 codebook。论文披露的关键点是:视觉 codebook 扩到 131,072,tokenizer 使用 下采样;图像 decoder 可以走 vanilla decoder,也可以走 diffusion-based decoder;后者通过 LoRA distillation 从 50 steps 加速到 4 steps。视频 decoder 则用 keyframe tokens 加 diffusion-based video decoder 生成连续视频。
这说明 Emu3.5 的“native”不是把像素直接塞进 LLM,而是把视觉离散化成可预测 token,再用 decoder 把 token 还原成高质量视觉输出。
训练细节
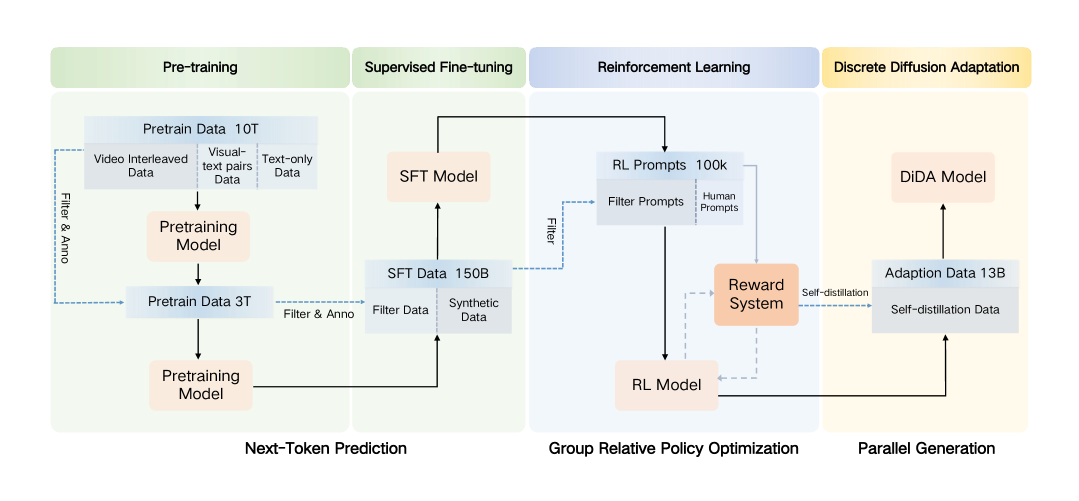
图源:Emu3.5,Figure 4。原论文图意:展示 Emu3.5 从大规模 pre-training,到 SFT、RL,再到 DiDA inference adaptation 的整体训练 pipeline。
这张训练图怎么读。
先看 pre-training:模型在约 13T multimodal tokens 上学习视觉语言下一状态,其中核心来源是长视频帧和 transcript。再看 SFT:它把统一接口扩成 General Tasks、Any-to-Image、Visual Narrative、Visual Guidance、World Exploration 和 Embodied Manipulation。最后看 RL 与 DiDA:一个优化多任务生成/推理质量,一个优化推理速度。
这张图支撑的是“world learner 的训练链路”,不是单个 benchmark 分数。
Pre-training:视频帧与 transcript 是主燃料
Emu3.5 的 pre-training 数据超过 13T multimodal tokens,分为四类:
| Component | Role |
|---|---|
| Interleaved vision-language data | 从 sequential video frames 和 temporally aligned audio transcripts 学长时上下文 |
| Vision-text pairs | 补充通用图文对齐和视觉语义 |
| Any-to-image data | 支撑多图输入、编辑和开放式 X2I |
| Text-only data | 保持语言建模与推理能力 |
 { width=“820” .atlas-figure-compact }
{ width=“820” .atlas-figure-compact }
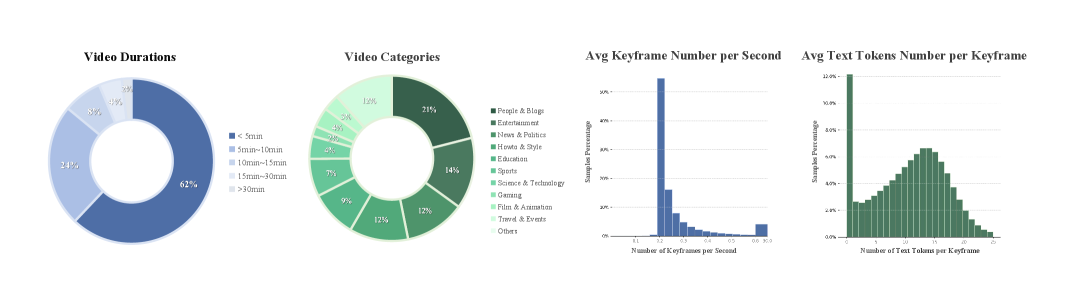
图源:Emu3.5,Figure 5。原论文图意:统计 video interleaved data 的时长分布、类别分布和关键帧抽取密度。
这张数据图怎么读。
论文收集约 63M videos,平均时长约 6.5 minutes,总量约等于 790 years of continuous footage。预处理时先做 scene detection,再按场景取 middle frame 或按间隔采样 keyframes,同时用 Whisper-large-v2 抽取 transcript。
这里的训练信号不是“视频 caption”,而是长时 visual frames 与 speech/text 的共同序列。它比孤立 image-text pair 更接近世界模型需要的状态流。
SFT:把世界任务显式化
| Task | # Tokens (B) | Question Type | Output Type |
|---|---|---|---|
| General Tasks | 29.7 | Language / VL / T2I | Text / Image |
| Any-to-Image | 56.2 | Multimodal Generation | Image |
| Visual Narrative | 10.1 | Story Generation | Interleaved Narrative |
| Visual Guidance | 22.5 | Procedural Reasoning | Interleaved Guidance |
| World Exploration | 17.5 | Scene Navigation | Interleaved Scene Synthesis |
| Embodied Manipulation | 14.1 | Action Planning | Interleaved Action Plan |
表源:Emu3.5,Table 3。原表英文列名保留;数值用于说明 SFT 任务配比。
这张表是 Emu3.5 最值得细读的训练细节。它把统一多模态模型的后训练任务分成普通能力和世界能力:
| World-oriented task | 训练目标 | 边界 |
|---|---|---|
| Visual Guidance | 用图像/视频帧指导步骤化过程 | 更像过程说明和视觉计划,不等于真实执行 |
| World Exploration | 生成交互式 scene observations 与 narrations | 有空间一致性目标,但仍是生成式探索 |
| Embodied Manipulation | 预测 subtask instructions 和 keyframe states | 是 keyframe/subtask world modeling,不是连续低层控制 |
RL:增强统一接口,不是物理 reward
SFT 之后,Emu3.5 做 large-scale multi-task RL。论文展示 reward 从约 4.5 上升到大于 7.1,说明统一后训练可以提升多任务生成和推理表现。
但它和 Dreamer/PlaNet 那类 model-based RL 不同。这里的 reward 主要来自 multimodal generation / reasoning 的评价信号,不是机器人环境里的稀疏成功奖励、碰撞惩罚或物理代价。因此本站把它读成“统一多模态后训练”,而不是“已解决闭环控制”。
DiDA:把视觉块从逐 token 改成并行预测
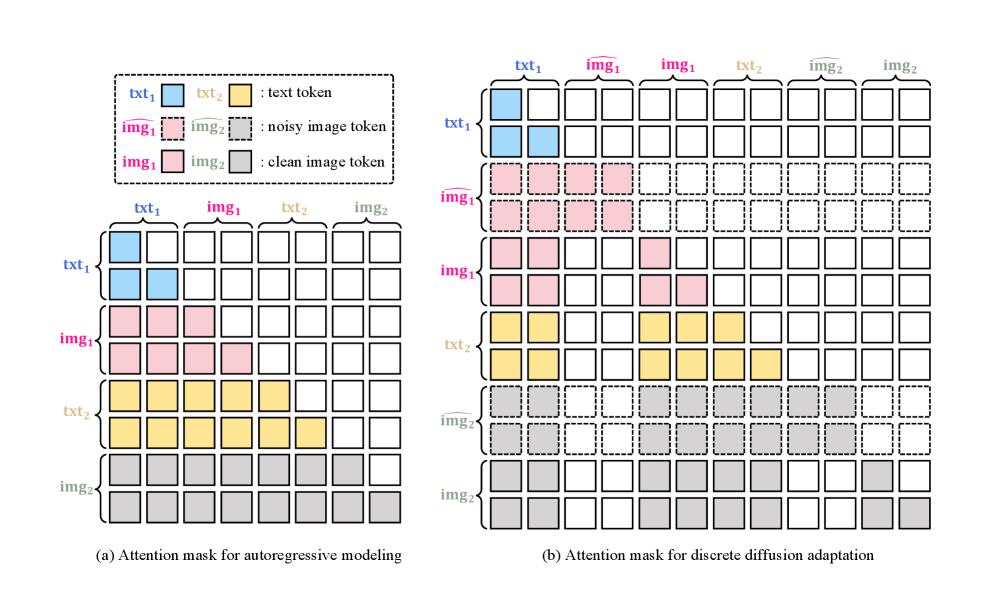
图源:Emu3.5,Figure 9。原论文图意:训练阶段用标准 next-token prediction;DiDA 阶段复制图像并随机 mask token,让模型学习双向并行预测,从而加速图像生成。
DiDA 图要看视觉 token 如何并行化。
NTP 适合语言,因为句子天然有顺序;但图像 token 数量很大,逐 token 生成会很慢。DiDA 的核心是把同一张图复制成条件/目标形式,随机 mask 目标视觉 token,让模型在视觉块内部做 bidirectional parallel prediction。
论文声称 per-image inference 大约 20x 加速。对世界模型部署来说,这类加速很关键:交互式 world rollout 的瓶颈往往不是模型会不会生成,而是能不能足够低延迟地生成下一观察。
实验结论
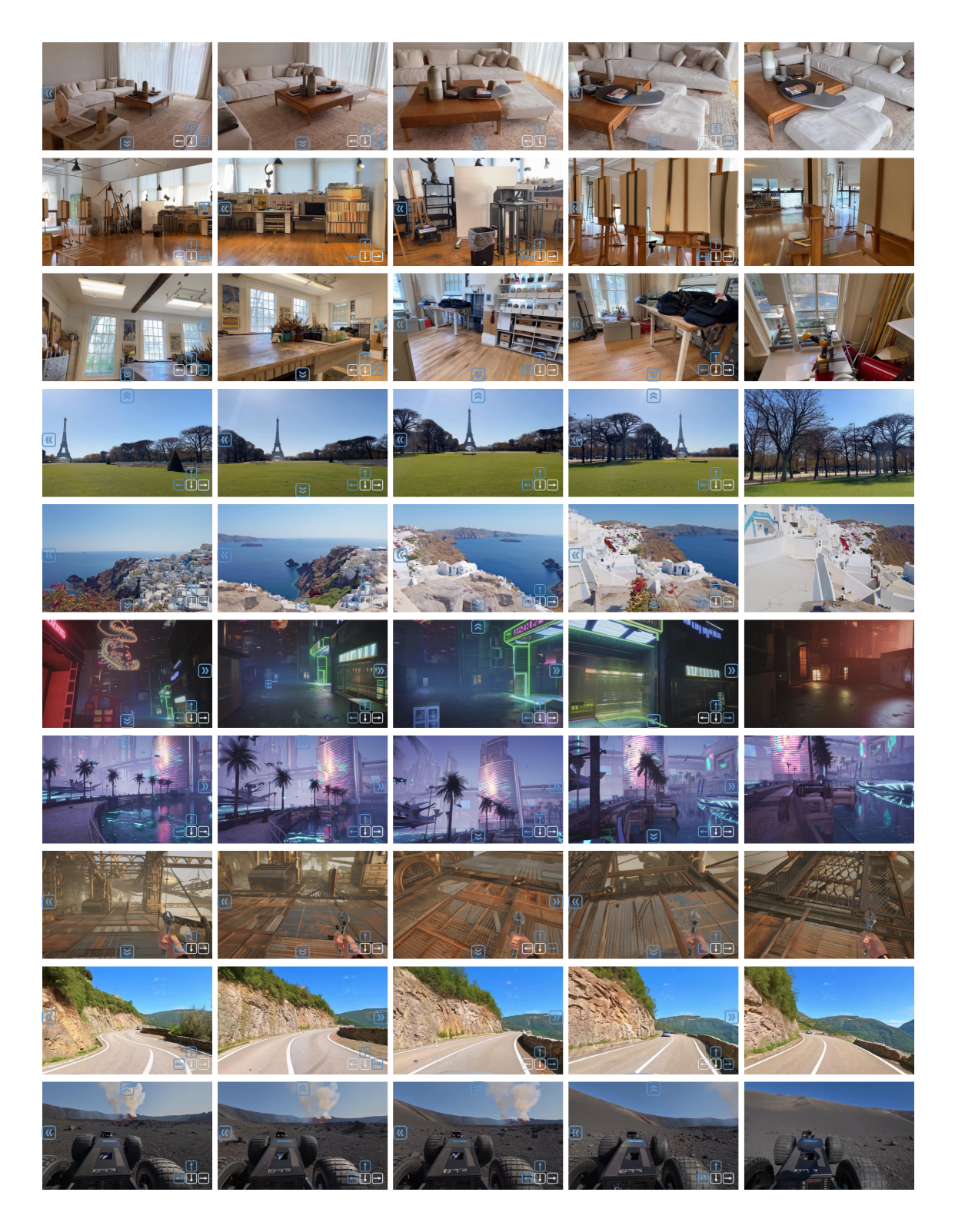
图源:Emu3.5,Figure 18。原论文图意:展示 world exploration 结果;图中按钮表示 camera movement 或 viewpoint change instructions。
这张图支撑什么。
这张图说明 Emu3.5 可以在用户给定世界或场景后,以 interleaved vision-language 输出方式做多步探索。它支撑的是 spatiotemporal consistency 和 controllable viewpoint change 的生成能力。
它不能单独证明真实机器人导航,因为没有真实传感器闭环、地图误差、碰撞约束或执行反馈。

图源:Emu3.5,Figure 19。原论文图意:展示 embodied manipulation 结果,用 interleaved subtask instructions 和 keyframe states 表示长时程操作过程。
Embodied manipulation 图看子任务和关键状态。
读这张图时不要把它当 action policy。它更像“任务分解 + 关键状态预测”:模型把长任务拆成若干语义子任务,并为每个子任务生成完成状态 keyframe。
对 VLA 项目来说,它可以作为 planner 或 world-state proposal 的候选模块;低层控制、轨迹跟踪、夹爪力控和失败恢复仍需要另外的系统。
消融诊断
| Diagnostic | Observation | 训练/推理含义 |
|---|---|---|
| Video data statistics | 约 63M videos,平均约 6.5 minutes,配合 scene detection 与 Whisper transcript | world learner 的主要燃料是长时视觉语言状态流,不只是 image-text pairs |
| SFT task mix | World Exploration 17.5B tokens、Embodied Manipulation 14.1B tokens | 世界能力需要在后训练中显式变成任务接口 |
| RL post-training | 多任务 reward 从约 4.5 提升到大于 7.1 | RL 强化统一接口质量,但 reward 不是物理环境 reward |
| DiDA inference | 随机 mask 视觉 token 后做 bidirectional parallel prediction,报告约 20x per-image acceleration | 适合交互式 rollout 的延迟优化,但不是能力本身 |
和 BAGEL、LingBot-World 的关系
| Dimension | BAGEL | Emu3.5 | LingBot-World |
|---|---|---|---|
| Training objective | CE + Rectified Flow | unified next-token prediction | video generation objective + action conditioning |
| Core data | text / image / video / web interleaved | long video frames + transcripts + task SFT | videos, interaction trajectories, action/camera controls |
| World modeling signal | navigation / manipulation demos from interleaved pretraining | next-state vision-language prediction, exploration and keyframes | action-conditioned rollout simulator |
| Inference focus | generalized causal attention + KV cache | DiDA parallel visual prediction | causal rollout + KV cache + few-step distillation |
| Missing proof | closed-loop action causality | real execution and physical feedback | independent downstream policy improvement |
Emu3.5 最适合和 LingBot-World 对读。Emu3.5 从 native multimodal NTP 出发,强调视觉语言下一状态;LingBot-World 从视频生成器出发,强调动作条件和实时交互模拟。前者更像“统一状态序列底座”,后者更像“动作可控模拟器”。
局限风险
- 离散视觉 token 不是连续物理状态:token 级 next-state prediction 可以生成连贯图像,但不保证几何、接触和动力学精确。
- world exploration 仍是生成式展示:没有地图误差、真实传感器噪声、执行器延迟和安全约束。
- embodied manipulation 是 keyframe/subtask 级别:它预测关键状态和语义步骤,不输出可执行低层轨迹。
- 数据治理成本极高:63M 视频、ASR、scene detection、keyframe 抽取、SFT 多任务标注和 RL 都不是轻量流程。
- DiDA 是推理加速,不是能力本身:它让视觉输出更快,但 world-state 正确性仍要靠数据、训练和评测保证。
阅读结论
Emu3.5 的核心启发是:如果把长视频帧、transcript、instruction、reasoning 和 keyframe 状态组织成统一序列,next-token prediction 可以被解释为视觉语言世界状态的下一步预测。它把统一多模态模型向 world model 推了一步。
但从工程角度看,它还不是可以直接部署到机器人或交互环境的完整世界模型。它更适合作为高层世界状态生成器、可视化 planner、长时 narrative simulator 或 embodied task proposal 模块;真实闭环还需要 action-conditioned dynamics、低层控制和失败反馈。
阅读结论。
Emu3.5 是统一多模态世界模型路线的重要样本。强证据在于 13T+ multimodal pretraining、long video interleaved data、SFT 世界任务和 DiDA 推理加速;弱证据在于 world exploration 与 embodied manipulation 仍主要是生成式视觉语言输出,尚未证明真实闭环控制收益。
外部精读
- Emu3.5 arXiv:读数据、SFT 世界任务、DiDA 和 world exploration / embodied manipulation 图表。
- ar5iv HTML:适合检索 Figure 3/4/5/9/18/19 和表格。
- BAAI Emu3.5 GitHub:确认模型、推理入口和代码发布状态。
- BAAI/Emu3.5 on Hugging Face:查看模型卡、权重和使用说明;能力 claim 仍回到论文。
- BAGEL 与 Beyond Language Modeling:作为统一多模态世界模型路线对照,帮助区分 flow-based visual generation、native visual-token NTP 和 action-conditioned future prediction。
- Title: 论文专题讲解:Emu3.5:原生多模态模型如何变成世界学习器
- Author: Charles
- Created at : 2026-05-30 09:00:00
- Updated at : 2026-05-30 09:00:00
- Link: https://charles2530.github.io/2026/05/30/ai-files-paper-deep-dives-world-models-emu3-5/
- License: This work is licensed under CC BY-NC-SA 4.0.